
En este artículo encontrarás 5 categorías:
- Requisitos mínimos
- Instalar el complemento REVIT
- Insertar nube de puntos en REVIT
- Gestión de nubes de puntos
- Insertar las fuentes de un proyecto en REVIT
- Gestión de burbujas (imágenes 360) de una nube de puntos.
1. Requisitos mínimos
Configuración Mínima:
Procesador: Dual-core 2 GHz o superior
RAM: Mínimo 8 GB o más
Tarjeta gráfica: Nvidia Quadro o GeForce 1 GB + versiones OpenGL 4.5 o superiores (se deben instalar los últimos controladores)
Disco Duro: 1 GB o más de espacio de almacenamiento libre
Configuración Recomendada:
Procesador: Intel® i-Series, Xeon®, AMD® Ryzen, Ryzen Threadripper PRO. 2,5 GHz o superior
RAM: Mínimo 16 GB o más
Tarjeta gráfica: Nvidia Quadro o GeForce 1 GB + versiones OpenGL 4.5 o superiores (se deben instalar los últimos controladores)
Disco Duro: 5 GB o más de espacio de almacenamiento libre
2. Instale el complemento REVIT
Una vez que reciba el instalador, ábralo (haga doble clic en el archivo) para mostrar la siguiente interfaz:

En esta ventana, seleccione la versión de Revit en la que desea instalar el complemento (2022 o 2023). Haga clic en la versión deseada en el rectángulo de selección (rectángulo rojo), de la foto a continuación:

Después de elegir la versión, haga clic en "Siguiente" ubicado en la parte inferior derecha de la interfaz. La interfaz luego cambiará para mostrar la siguiente foto:

En cualquier momento, puede volver a su selección anterior haciendo clic en "Anterior", o cancelar la descarga actual haciendo clic en "Cancelar", para continuar con la instalación, haga clic en "Instalar".

Para obtener más información sobre cómo cancelar la descarga, consulte la sección "Cancelar la descarga en curso" . Si se produce un conflicto durante la instalación, consulte "Ejecución de conflictos de Revit".
La descarga comenzará automáticamente y llegarás a esta interfaz:

Felicidades ! Ha terminado de instalar el complemento de Revit. Haga clic en el botón "Finalizar" (marco azul) en la parte inferior derecha de la interfaz para finalizar el proceso.
Cancelar la descarga actual:
Si hizo clic en el botón "Cancelar" ubicado en la parte inferior derecha de cada interfaz del instalador, verá la siguiente interfaz:

Tiene dos opciones: hacer clic en "Sí" para cancelar la instalación del complemento de Revit o hacer clic en "No" para volver a la interfaz anterior.

Conflicto, Revit se está ejecutando:
Si ocurre un conflicto durante la instalación, verá la siguiente interfaz:

En este caso, puede optar por continuar la descarga cerrando automáticamente la aplicación Revit. Tenga en cuenta que los proyectos actualmente abiertos en Revit no se guardarán y se perderán. Asegúrese de haber guardado su trabajo antes de continuar. También puede optar por continuar la instalación sin cerrar las aplicaciones en conflicto. Sin embargo, esto hará que la instalación falle y aparezca el siguiente mensaje:

Finalmente, puede hacer clic en "Cancelar" para cancelar la instalación. Para obtener más información sobre la cancelación, consulte la sección "Cancelar la descarga actual". También puede hacer clic en "Siguiente", que de forma predeterminada realizará la misma acción que continuar con la instalación cerrando la aplicación Revit.
3. Insertar una nube de puntos en REVIT
Si el complemento de Revit no está instalado en su computadora, primero puede ir a la categoría "Instalación del complemento de Revit" y luego regresar a esta categoría después de esta operación.
Tenga en cuenta que con estos complementos puede servir cualquier nube de puntos en la plataforma. Primero, abra un proyecto desde el menú principal haciendo clic en la imagen del proyecto. Si no hay ningún proyecto disponible, vaya al artículo " Crear un proyecto ".
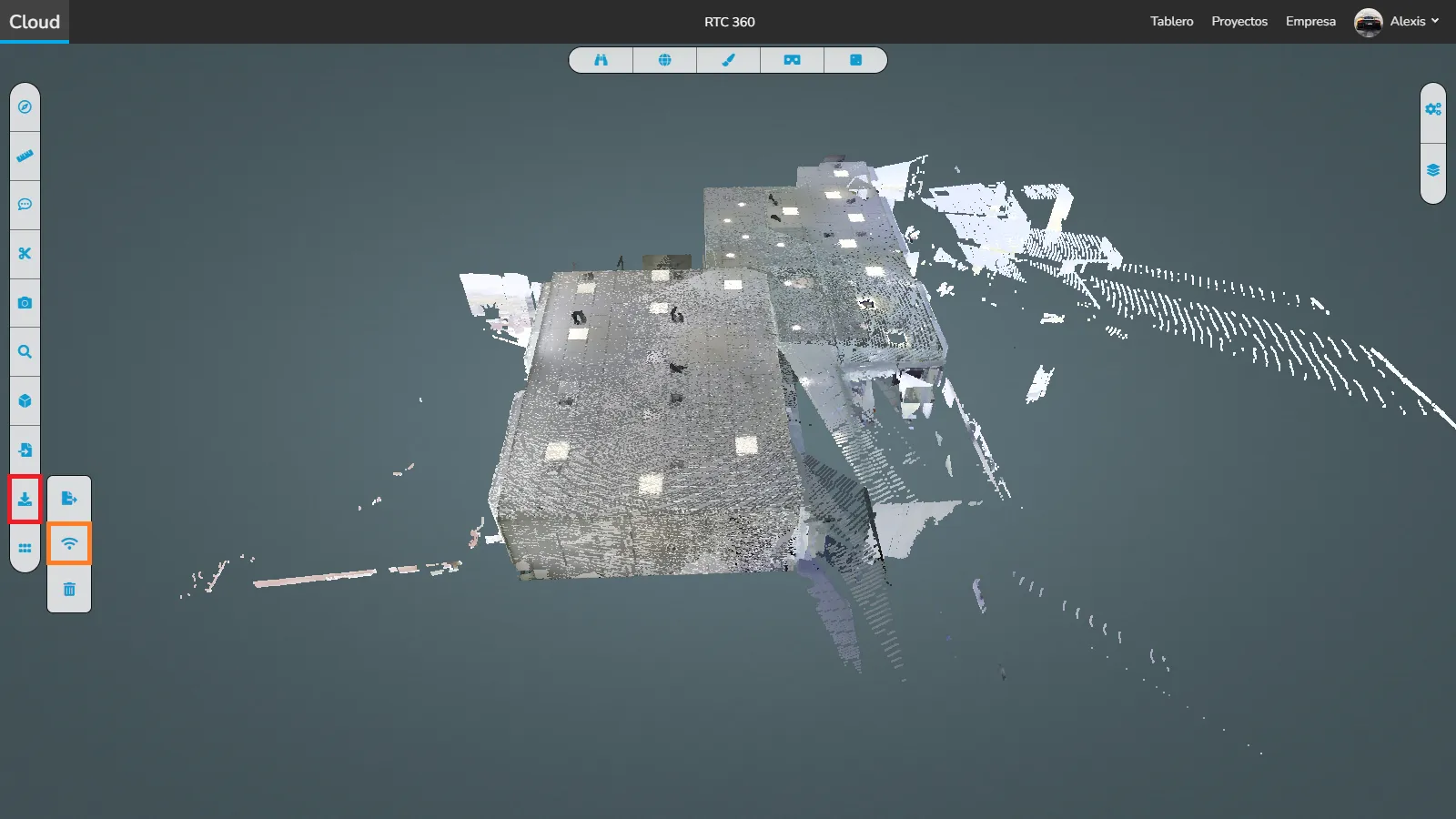
Una vez que haya abierto un proyecto, abra el menú de exportación y seleccione streaming.
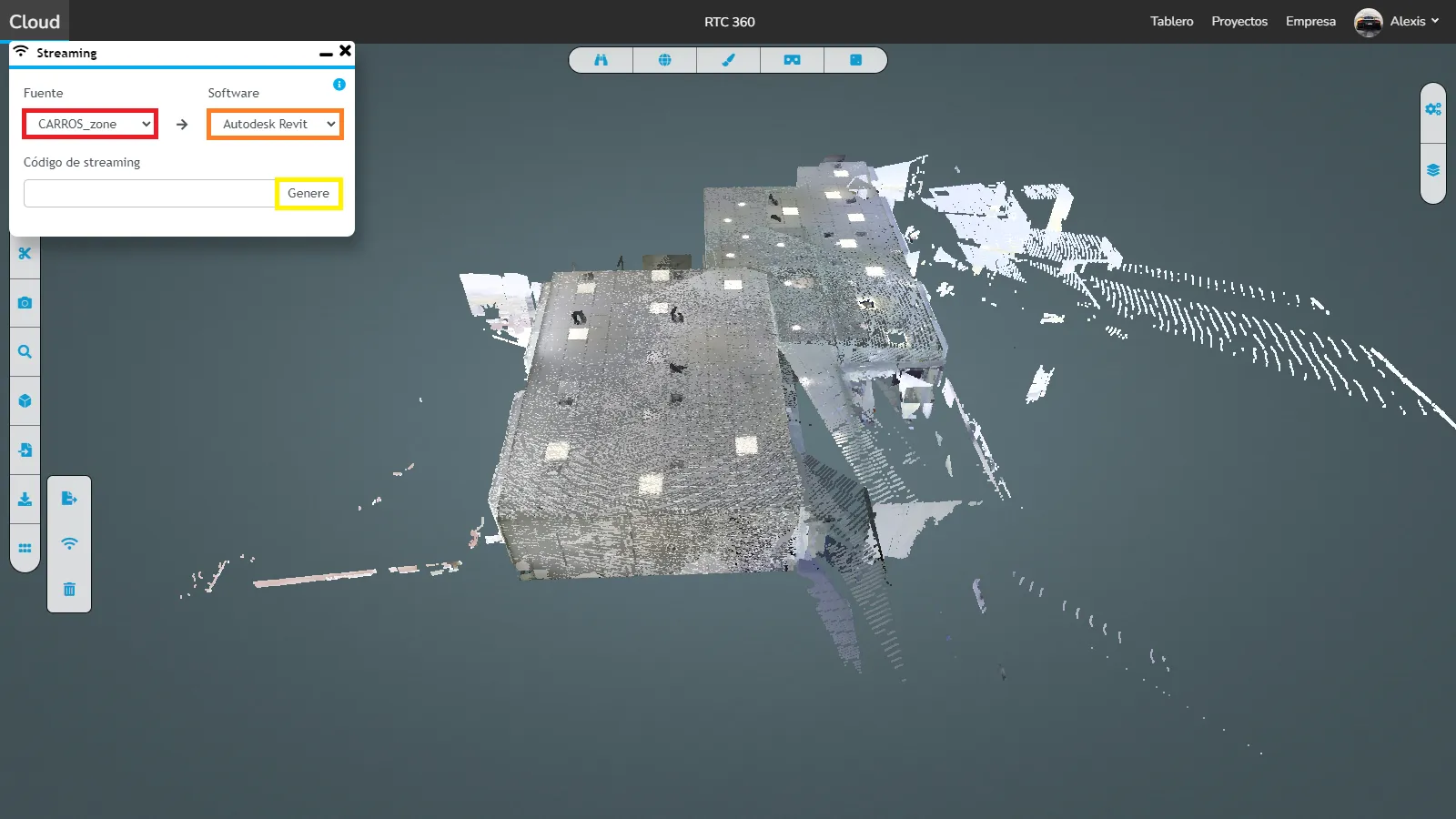
Ahora tenemos acceso a la ventana de transmisión, seleccionamos la nube de puntos que deseamos transmitir así como el software Autodesk Revit.
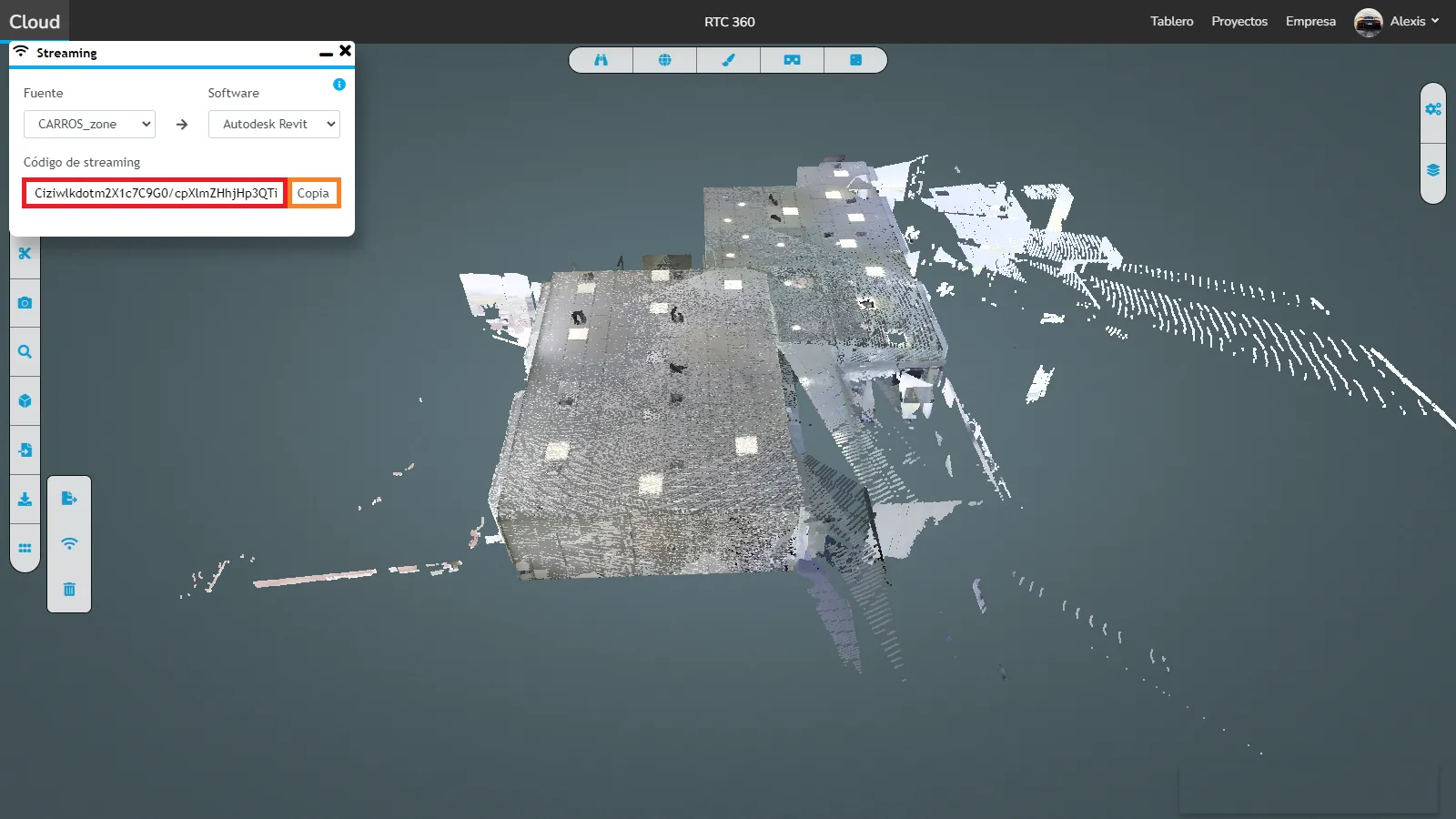
Haga clic en " Generar " para obtener el código de transmisión.
Para copiar el código , haga clic en el botón copiar.
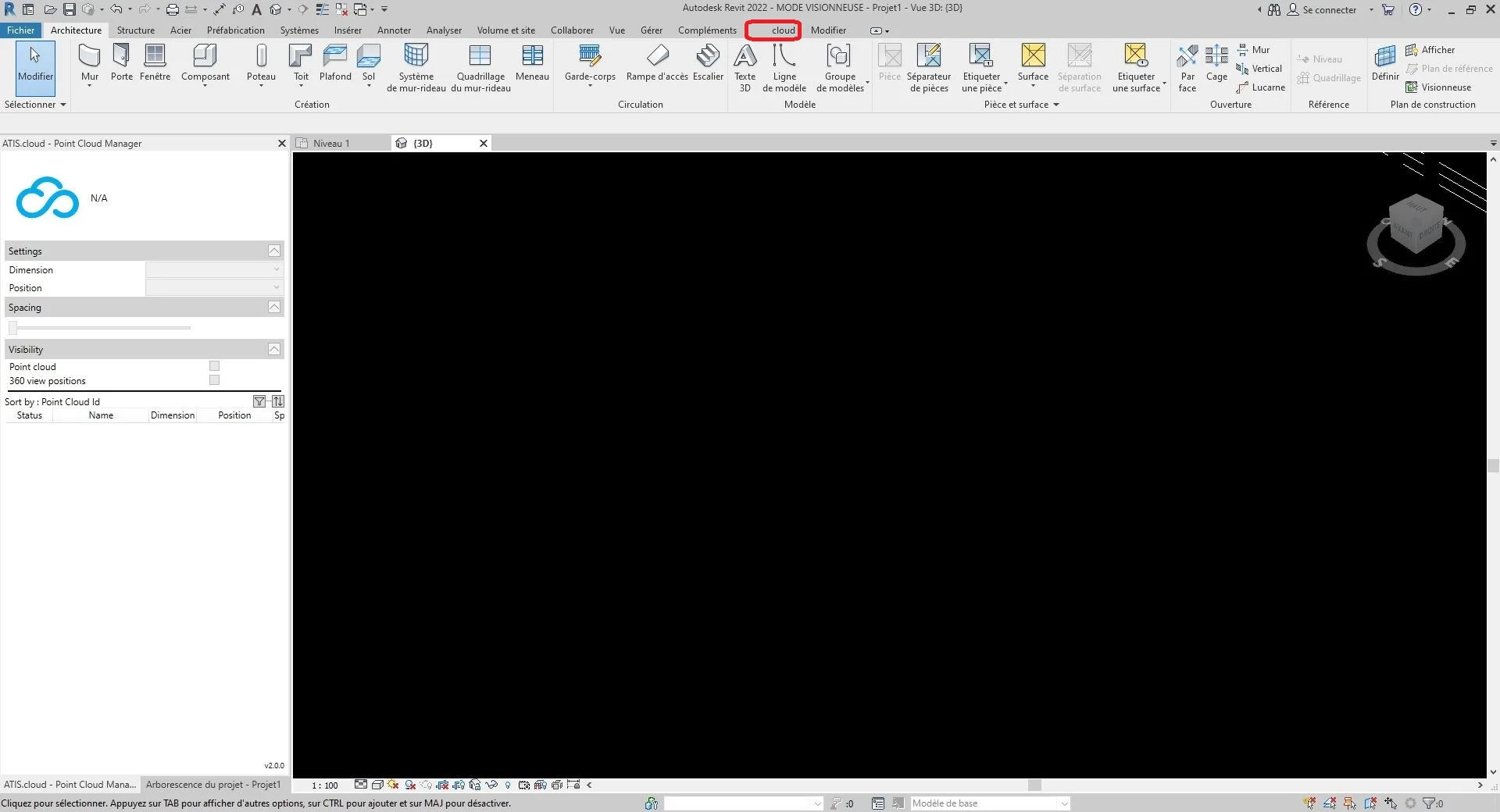
Luego abra Autodesk REVIT con el complemento agregado anteriormente. Si aún no está agregado, vaya a la categoría " Instalación del complemento de Revit" .
En su proyecto de Revit, haga clic en "nube" en la barra de herramientas ubicada en la parte superior.
Haga clic en "cloud streamer" ubicado en la categoría "Agregar nube de puntos" en la barra de herramientas en la parte superior de la pantalla.
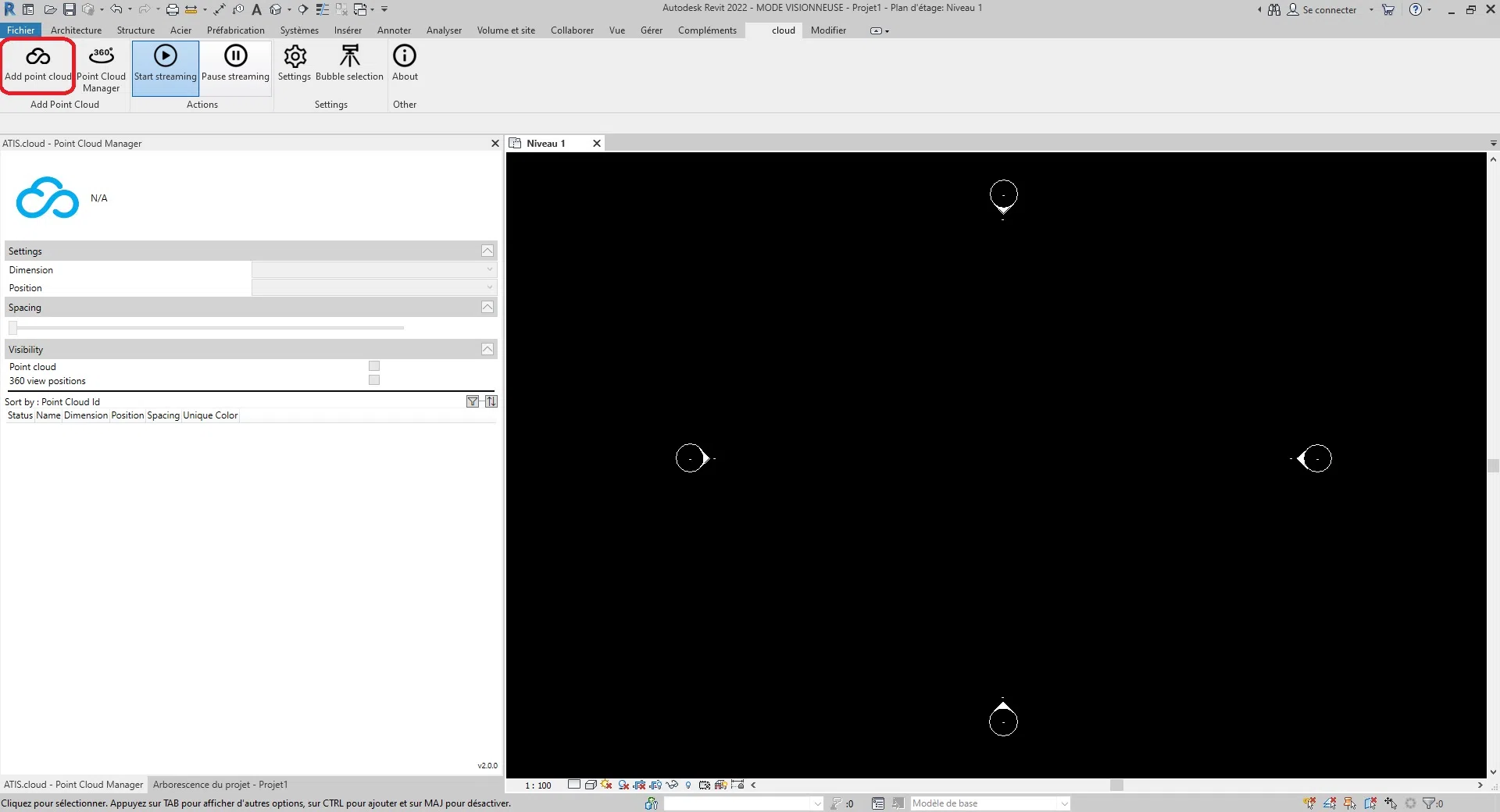
Después de esta acción, apareció un cuadro de diálogo en la pantalla, haga clic en el icono del bloc de notas a la derecha del botón de la papelera.
A modo de información, el código generado desde el sitio denominado "código de transmisión" corresponde al campo "Código de acceso" en Revit. Además, puedes eliminar este campo en cualquier momento haciendo clic en el botón de eliminar simbolizado por una papelera.

Luego puede configurar la dimensión de la nube de puntos. La dimensión es el tipo de visualización que tendrá.
A título informativo, todos los ajustes de la nube de puntos se pueden modificar incluso después de añadirlos gracias al “ Point Cloud Manager ”.
Actualmente hay cinco tipos de dimensiones compatibles.
- Colores : Se utiliza para representar el color de cada punto en la nube de puntos. Los canales rojo, verde y azul se utilizan para representar el color del punto, mientras que el canal alfa se utiliza para representar la transparencia u opacidad del punto. El uso del color en las nubes de puntos LiDAR puede resultar útil con fines de visualización e interpretación, ya que puede proporcionar información adicional sobre las propiedades de los objetos y superficies representados por los puntos. Por ejemplo, en el mapeo de vegetación, el color de los puntos se puede utilizar para distinguir entre diferentes tipos de vegetación o para identificar áreas con alta o baja densidad de vegetación.
- Intensidad : Representa la fuerza o amplitud de la señal que recibió un sensor o dispositivo cuando se capturó el punto. En algunos casos, la intensidad está relacionada con la reflectancia del objeto en ese punto. Por ejemplo, en una nube de puntos LiDAR, el valor de intensidad representa la cantidad de luz láser que el objeto ha reflejado de regreso al sensor. En este caso, un valor de Intensidad más alto indicaría una superficie que refleja más luz, como una pared blanca, mientras que un valor de Intensidad más bajo indicaría una superficie que refleja menos luz, como un automóvil negro. En otros casos, la intensidad puede representar una cantidad física diferente. Por ejemplo, en una nube de puntos fotográfica, la intensidad puede representar el brillo de un píxel en la imagen original que se utilizó para generar la nube de puntos.
- Clasificación : Sólo funcionará con nubes de puntos compatibles . El propósito de la clasificación es agrupar puntos similares en categorías significativas, como suelo, vegetación, edificios y otros objetos.
- Altura : Representa la altura o posición vertical de cada punto. Los datos de elevación son importantes en muchas aplicaciones de nubes de puntos, como la cartografía topográfica, el modelado de inundaciones, la planificación urbana y el diseño de infraestructura.
- ID de fuente de punto : identifica el sensor láser específico que generó el punto. Cada sensor láser en un sistema LiDAR tiene un identificador o número único, y esta información se registra en los datos de la nube de puntos para permitir el análisis y el control de calidad. La identificación de fuentes puntuales es especialmente útil en situaciones en las que se utilizan varios sensores LiDAR para capturar una sola escena o área. Al identificar qué sensor generó cada punto, es posible realizar controles de calidad de los datos y garantizar que los datos estén correctamente alineados y registrados entre los diferentes sensores. Esto es especialmente importante en aplicaciones como la silvicultura, donde se pueden utilizar múltiples sensores LiDAR para capturar datos desde diferentes ángulos y perspectivas. En nuestra plataforma, la identificación de la fuente puntual se utiliza para almacenar la identificación del análisis de la fuente, lo que permite a los usuarios rastrear fácilmente de qué análisis se originó cada punto en la nube de puntos. Por ejemplo, si se realizaron múltiples escaneos en la misma área usando un escáner láser 3D, a cada escaneo se le podría asignar una ID de escaneo única y el atributo de ID de fuente de punto para cada punto en los puntos de la nube se podría establecer en el ID de escaneo correspondiente.
Para seleccionar la dimensión deseada, haga clic en el rectángulo de selección a la derecha del texto "Dimensión".

Haga clic en "Cargar nube de puntos" para inicializar los datos de la nube de puntos.

Cambie la configuración de inserción en Revit según sus preferencias. Puede ajustar el espacio entre puntos con el control deslizante "Espaciado" y elegir la posición de la nube de puntos en el proyecto seleccionando una de tres opciones: "Centro a centro", "Origen interno" o "En el sitio compartido".
- Centro a centro : esta opción coloca la nube de puntos utilizando el centro de la ventana gráfica como punto de referencia.
- Origen interno : Esta opción posiciona la nube de puntos utilizando el origen interno de la nube como punto de referencia. El origen interno suele estar definido por el sistema de coordenadas de la propia nube de puntos. Al utilizar esta opción, la nube de puntos se posicionará según su origen interno en lugar del origen del proyecto de Revit. Esto puede resultar útil cuando necesita alinear la nube de puntos con su propio sistema de coordenadas interno.
- En el sitio compartido : esta opción coloca la nube de puntos en la ubicación del sitio compartido. Un sitio compartido se refiere a una ubicación geográfica común en la que se pueden basar múltiples proyectos. Usando esta opción, la nube de puntos se posicionará según las coordenadas del sitio compartido. Esto puede resultar útil cuando se trabaja en proyectos basados en un sitio común y se desea alinear la nube de puntos con esa ubicación compartida.
- Automático: desde el origen hasta la última ubicación : Revit coloca la siguiente nube de puntos importada de forma coherente con la nube de puntos importada anteriormente. Esta opción se activa tras insertar una primera nube de puntos. Puedes mover esta primera nube, por ejemplo, para alinearla correctamente con los elementos del modelo. Si tiene nubes de puntos adicionales creadas en el mismo sitio y en el mismo sistema de coordenadas que la primera, se recomienda utilizar esta opción para insertar las nubes de puntos adicionales. Las nuevas nubes de puntos se posicionarán correctamente con respecto a la primera.
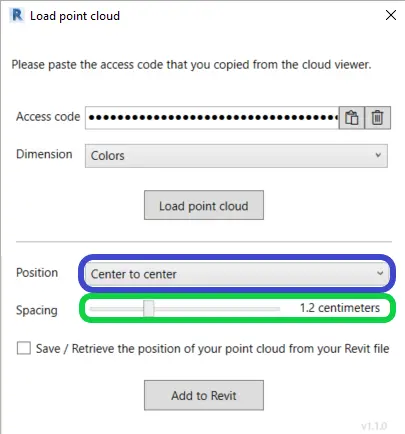
Una vez completada la configuración, haga clic en "Agregar a Revit" para insertar la nube de puntos en Revit.

Atención, las nubes de puntos agregadas por el complemento de Revit no se pueden guardar con el proyecto. Aparecerá un mensaje informándole de esta restricción al cerrar el proyecto.

Punto de inicio o parada de la transmisión:
En la barra de herramientas, en la categoría "Acción", tiene dos botones que le permiten iniciar la transmisión de puntos o detenerla.
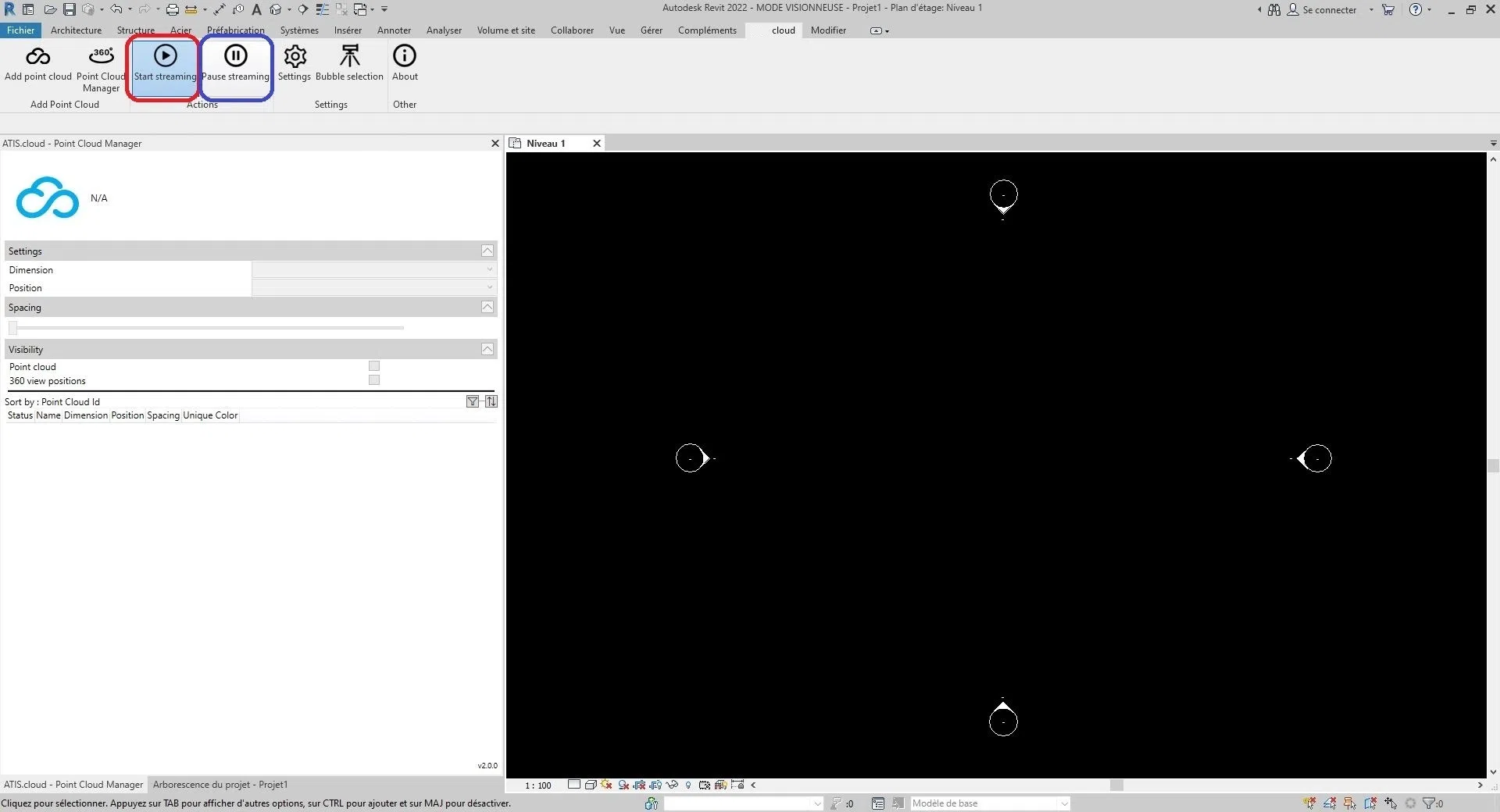
El streaming de puntos es una característica que permite que los puntos lleguen desde la nube poco a poco según una determinada organización. Sin embargo, esta operación requiere una conexión permanente a Internet y requiere ciertos recursos de la máquina host.
Es por esto que puedes detener haciendo clic en “Detener transmisión” o reiniciar haciendo clic en “Iniciar transmisión” el punto de transmisión.
Limpiar espacio de almacenamiento:
El complemento puede experimentar problemas de funcionamiento si el espacio en disco de su computadora se satura. Por esta razón, en el botón "Configuración" ubicado en la barra de menú "cloud" en la categoría "Configuración", puede liberar el espacio de almacenamiento reservado para el complemento de Revit. Primero, haga clic en "Configuración".
Aparecerá una ventana de diálogo con la información del complemento. Puede hacer clic luego en "Eliminar archivos".
Para obtener información, las nubes desaparecerán visualmente de Revit, esto es normal cuando inicia la transmisión de puntos, las nubes de puntos volverán a aparecer (vaya a la sección Detener o Iniciar la transmisión de puntos para iniciar la transmisión de puntos).
Desde esta ventana, también puedes especificar el valor máximo de la memoria GPU a utilizar y el valor máximo del espacio en disco que no debe superar el complemento.
¡Enhorabuena! Ahora ha insertado una nube de puntos en Revit a partir de los datos transmitidos.
Para obtener más información sobre cómo administrar la configuración de la nube de puntos, consulte la categoría "Administrador de nube de puntos".
Para obtener más información sobre cómo agregar fuentes de proyectos web en Revit, consulte la categoría "Agregar fuentes".
4. Gestión de la nube de puntos
Si el complemento de Revit no está instalado en su computadora, primero puede ir a la categoría " Instalación del complemento de Revit " y luego regresar a esta categoría después de esta operación.
- Consejo: Para seguir completamente las instrucciones de este artículo, le recomendamos que primero agregue una nube de puntos. Si no se hace esto, vaya a la categoría “ Insertar una nube de puntos en Revit ”
El “Point Cloud Manager” es una interfaz gráfica que permite modificar los parámetros de cada nube de puntos del proyecto de Revit desde el sitio web. Esta ventana permite mover, cambiar el tamaño de la interfaz así como anclarla a un lado de la pantalla de Revit.
Para comenzar, haga clic en una nube de puntos ubicada en la ventana "Administrador de nubes de puntos". Si no se muestra la interfaz, haga clic en el botón "Administrador de nube de puntos" ubicado en la barra de herramientas "Nube" en la categoría "Agregar nube de puntos".
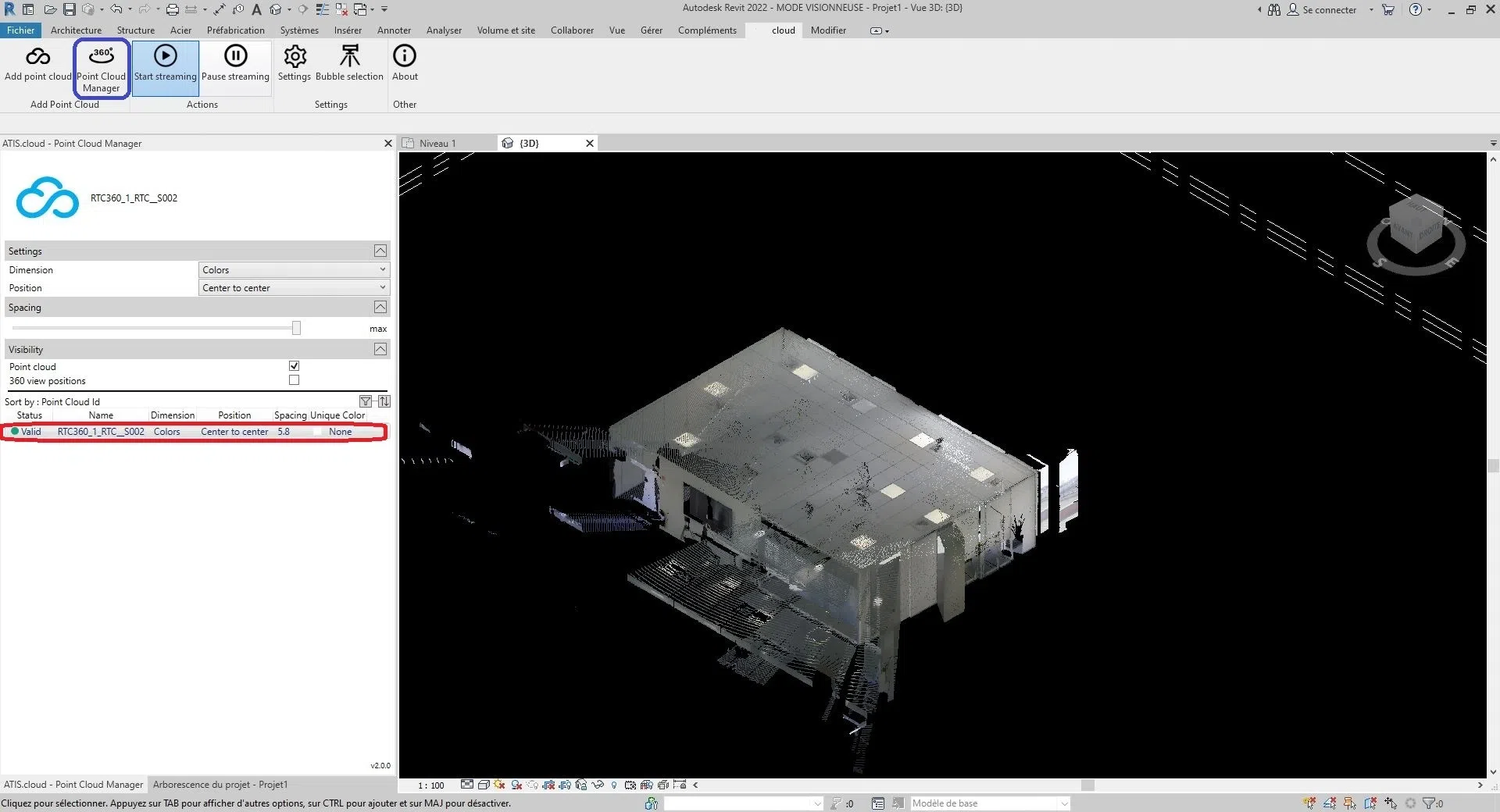
Apareció parte de la interfaz “Point Cloud Manager”. La interfaz se divide así:
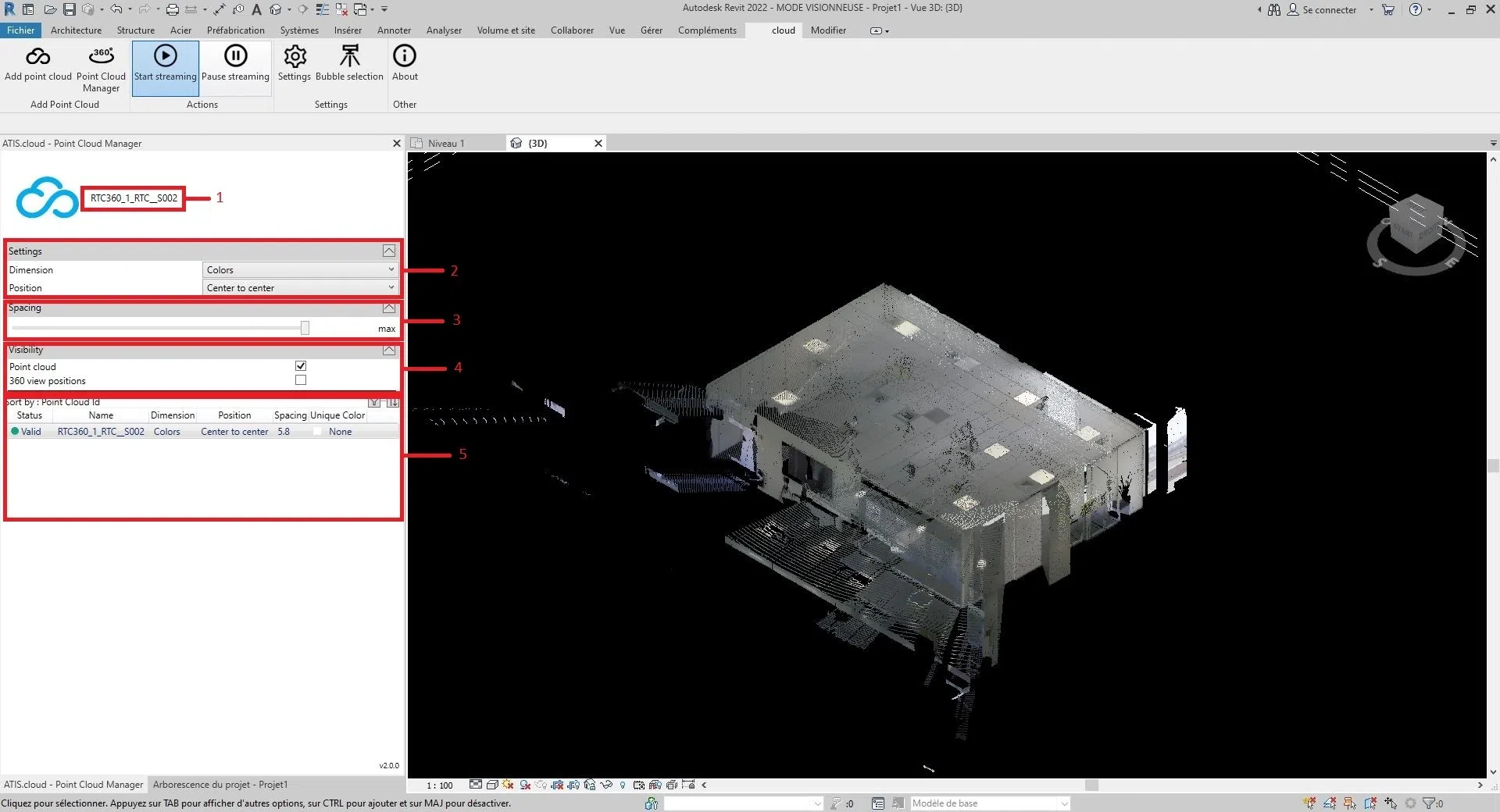
1: Nombre de la nube seleccionada, el nombre que se muestra es el mismo que el del proyecto web
2: Características de la nube como la dimensión y la posición de la nube
3: Espaciado de cada punto de la nube.
4: Nube de puntos y parámetro de visibilidad de los escáneres (para obtener más información sobre los escáneres, consulte el artículo “Escáner Revit”)
5: Todas las nubes insertadas a través del complemento Revit, permite ver de un vistazo los principales parámetros de cada nube así como ordenarlos.
- Truco :
- Puede doblar y desplegar secciones usando el botón de flecha a la derecha de cada sección;
- Puede cambiar el tamaño entre la parte 6 y el resto manteniendo presionado y luego moviendo el mouse sobre la barra negra ubicada entre la sección "Visibilidad" y la parte 6.
Ahora puedes modificar cada parámetro de cada nube de puntos.
- La dimensión de la nube, vaya a la sección “Cambiar la dimensión”;
- La posición de la nube, dirígete a la sección “Editar posición”;
- La distancia entre los puntos de la nube, vaya al apartado “Modificar el espaciado”;
- La visibilidad de la nube o de los escáneres, vaya a la sección “Cambiar visibilidad”.
Cambiar dimensión:
Para modificar la dimensión seleccionada, haga clic en el cuadro de selección a la derecha de "Dimensión".
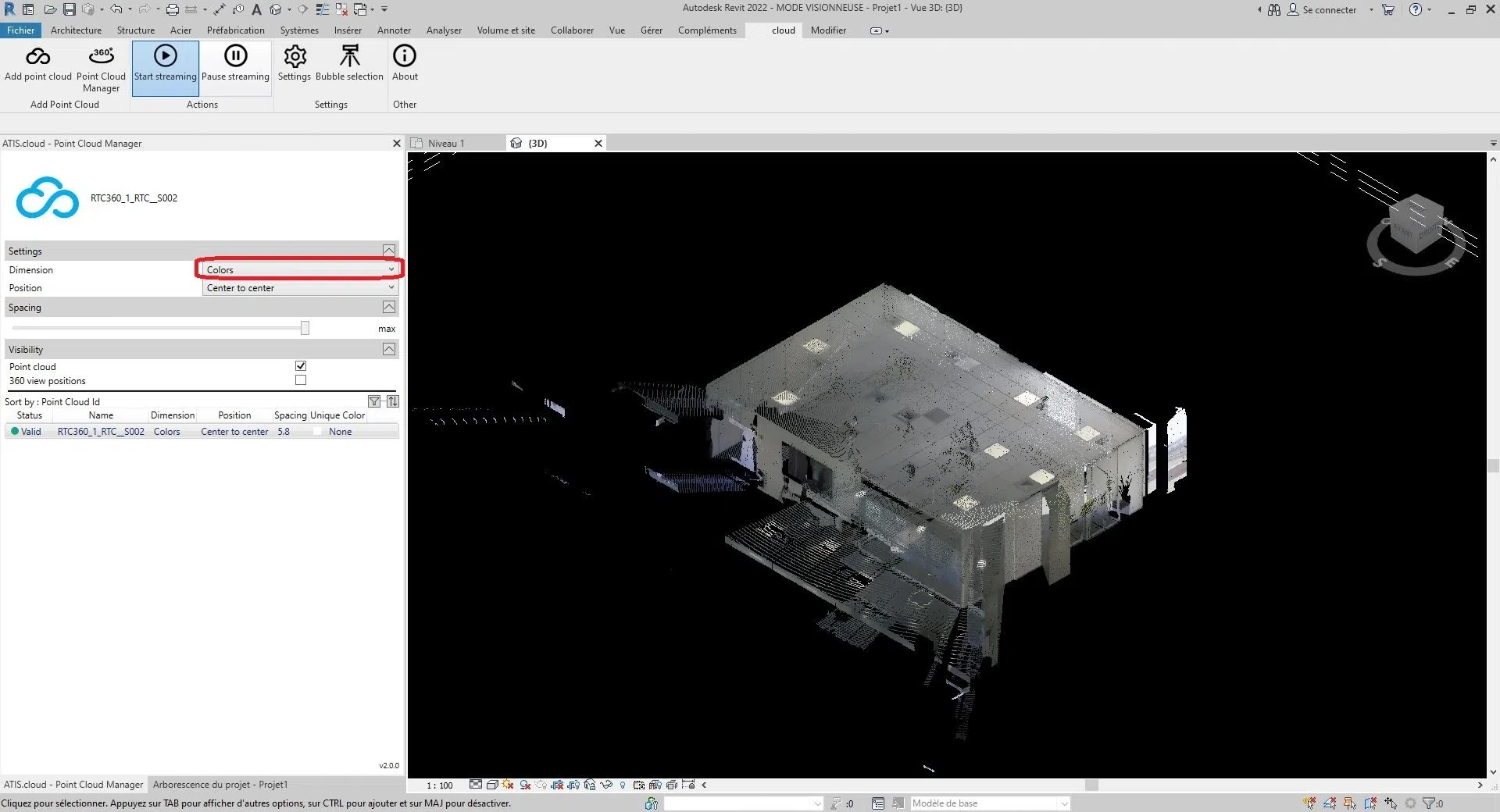
Hay seis tamaños para elegir:
Colores, Intensidad, Clasificación, Altura, ID de fuente puntual y Color único.
- Colores : Se utiliza para representar el color de cada punto en la nube de puntos. Los canales rojo, verde y azul se utilizan para representar el color del punto, mientras que el canal alfa se utiliza para representar la transparencia u opacidad del punto. El uso del color en las nubes de puntos LiDAR puede resultar útil con fines de visualización e interpretación, ya que puede proporcionar información adicional sobre las propiedades de los objetos y superficies representados por los puntos. Por ejemplo, en el mapeo de vegetación, el color de los puntos se puede utilizar para distinguir entre diferentes tipos de vegetación o para identificar áreas con alta o baja densidad de vegetación.
- Intensidad : Representa la fuerza o amplitud de la señal que recibió un sensor o dispositivo cuando se capturó el punto. En algunos casos, la intensidad está relacionada con la reflectancia del objeto en ese punto. Por ejemplo, en una nube de puntos LiDAR, el valor de intensidad representa la cantidad de luz láser que el objeto ha reflejado de regreso al sensor. En este caso, un valor de Intensidad más alto indicaría una superficie que refleja más luz, como una pared blanca, mientras que un valor de Intensidad más bajo indicaría una superficie que refleja menos luz, como un automóvil negro. En otros casos, la intensidad puede representar una cantidad física diferente. Por ejemplo, en una nube de puntos fotográfica, la intensidad puede representar el brillo de un píxel en la imagen original que se utilizó para generar la nube de puntos.
- Clasificación : Sólo funcionará con nubes de puntos compatibles . El propósito de la clasificación es agrupar puntos similares en categorías significativas, como suelo, vegetación, edificios y otros objetos.
- Altura : Representa la altura o posición vertical de cada punto. Los datos de elevación son importantes en muchas aplicaciones de nubes de puntos, como la cartografía topográfica, el modelado de inundaciones, la planificación urbana y el diseño de infraestructura. Al analizar los datos de elevación, es posible crear modelos de elevación digitales (DEM) precisos y detallados que se pueden utilizar para una amplia gama de propósitos de visualización y análisis geoespacial.
- ID de fuente de punto : identifica el sensor láser específico que generó el punto. Cada sensor láser en un sistema LiDAR tiene un identificador o número único, y esta información se registra en los datos de la nube de puntos para permitir el análisis y el control de calidad. La identificación de fuentes puntuales es especialmente útil en situaciones en las que se utilizan varios sensores LiDAR para capturar una sola escena o área. Al identificar qué sensor generó cada punto, es posible realizar controles de calidad de los datos y garantizar que los datos estén correctamente alineados y registrados entre los diferentes sensores. Esto es especialmente importante en aplicaciones como la silvicultura, donde se pueden utilizar múltiples sensores LiDAR para capturar datos desde diferentes ángulos y perspectivas. En nuestra plataforma, la identificación de la fuente puntual se utiliza para almacenar la identificación del análisis de la fuente, lo que permite a los usuarios rastrear fácilmente de qué análisis se originó cada punto en la nube de puntos. Por ejemplo, si se realizaron múltiples escaneos en la misma área usando un escáner láser 3D, a cada escaneo se le podría asignar una ID de escaneo única y el atributo de ID de fuente de punto para cada punto en los puntos de la nube se podría establecer en el ID de escaneo correspondiente.
- Color Único: El objetivo de la dimensión “Color Único” es poder colorear la nube de puntos con un color único definido por el usuario.
Cambiar de posición:
Para modificar la posición seleccionada, haga clic en el cuadro de selección a la derecha de “Posición”.
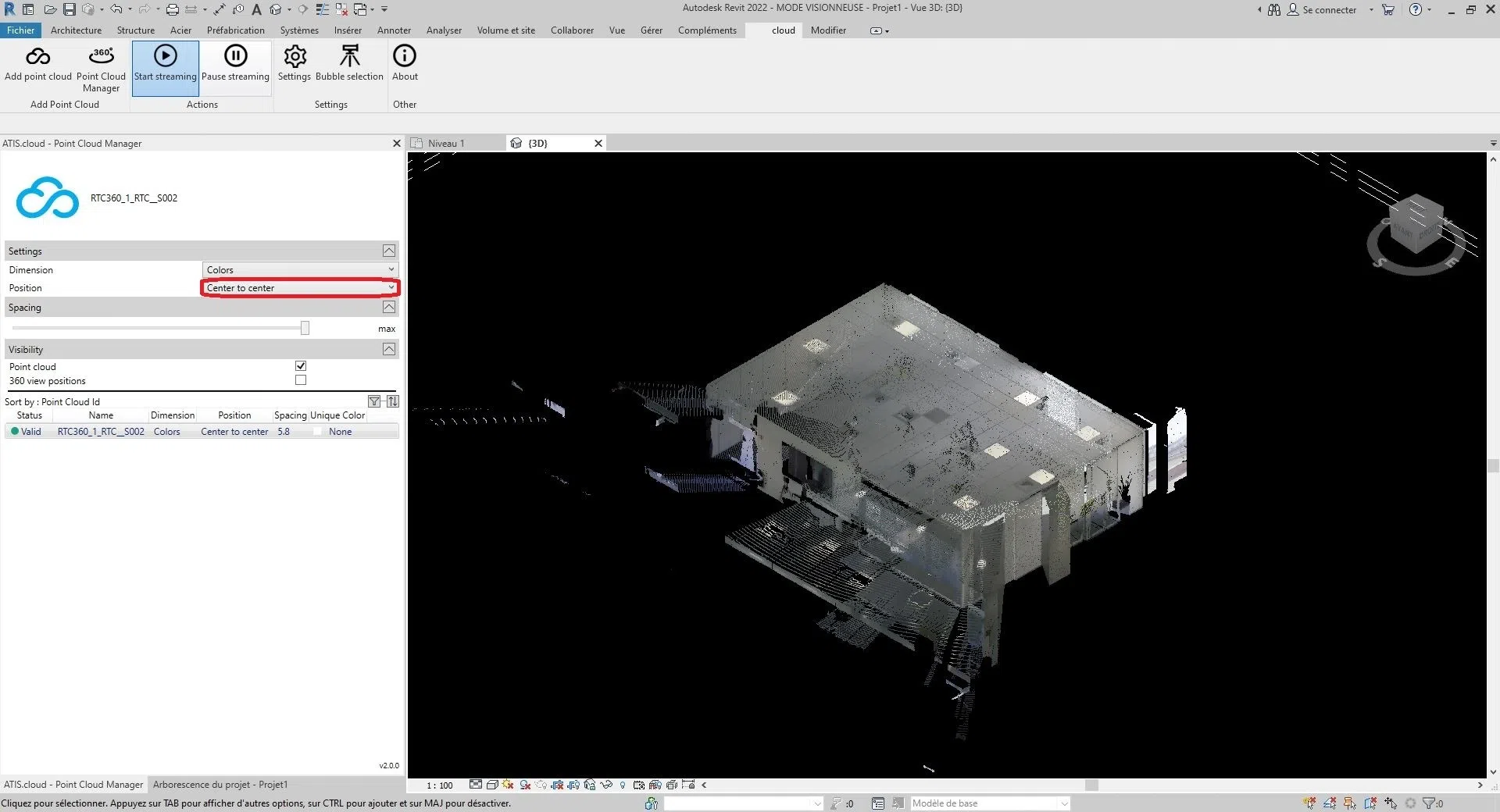
Podrás elegir entre estas tres opciones:
"Centro a centro", "Origen interno" o "En el sitio compartido".
- Centro a centro : esta opción coloca la nube de puntos utilizando el centro de la ventana gráfica como punto de referencia.
- Origen interno : Esta opción posiciona la nube de puntos utilizando el origen interno de la nube como punto de referencia. El origen interno suele estar definido por el sistema de coordenadas de la propia nube de puntos. Al utilizar esta opción, la nube de puntos se posicionará según su origen interno en lugar del origen del proyecto de Revit. Esto puede resultar útil cuando necesita alinear la nube de puntos con su propio sistema de coordenadas interno.
- En el sitio compartido : esta opción coloca la nube de puntos en la ubicación del sitio compartido. Un sitio compartido se refiere a una ubicación geográfica común en la que se pueden basar múltiples proyectos. Usando esta opción, la nube de puntos se posicionará según las coordenadas del sitio compartido. Esto puede resultar útil cuando se trabaja en proyectos basados en un sitio común y se desea alinear la nube de puntos con esa ubicación compartida.
- Automático: desde el origen hasta la última ubicación : Revit coloca la siguiente nube de puntos importada de forma coherente con la nube de puntos importada anteriormente. Esta opción se activa tras insertar una primera nube de puntos. Puedes mover esta primera nube, por ejemplo, para alinearla correctamente con los elementos del modelo. Si tiene nubes de puntos adicionales creadas en el mismo sitio y en el mismo sistema de coordenadas que la primera, se recomienda utilizar esta opción para insertar las nubes de puntos adicionales. Las nuevas nubes de puntos se posicionarán correctamente con respecto a la primera.
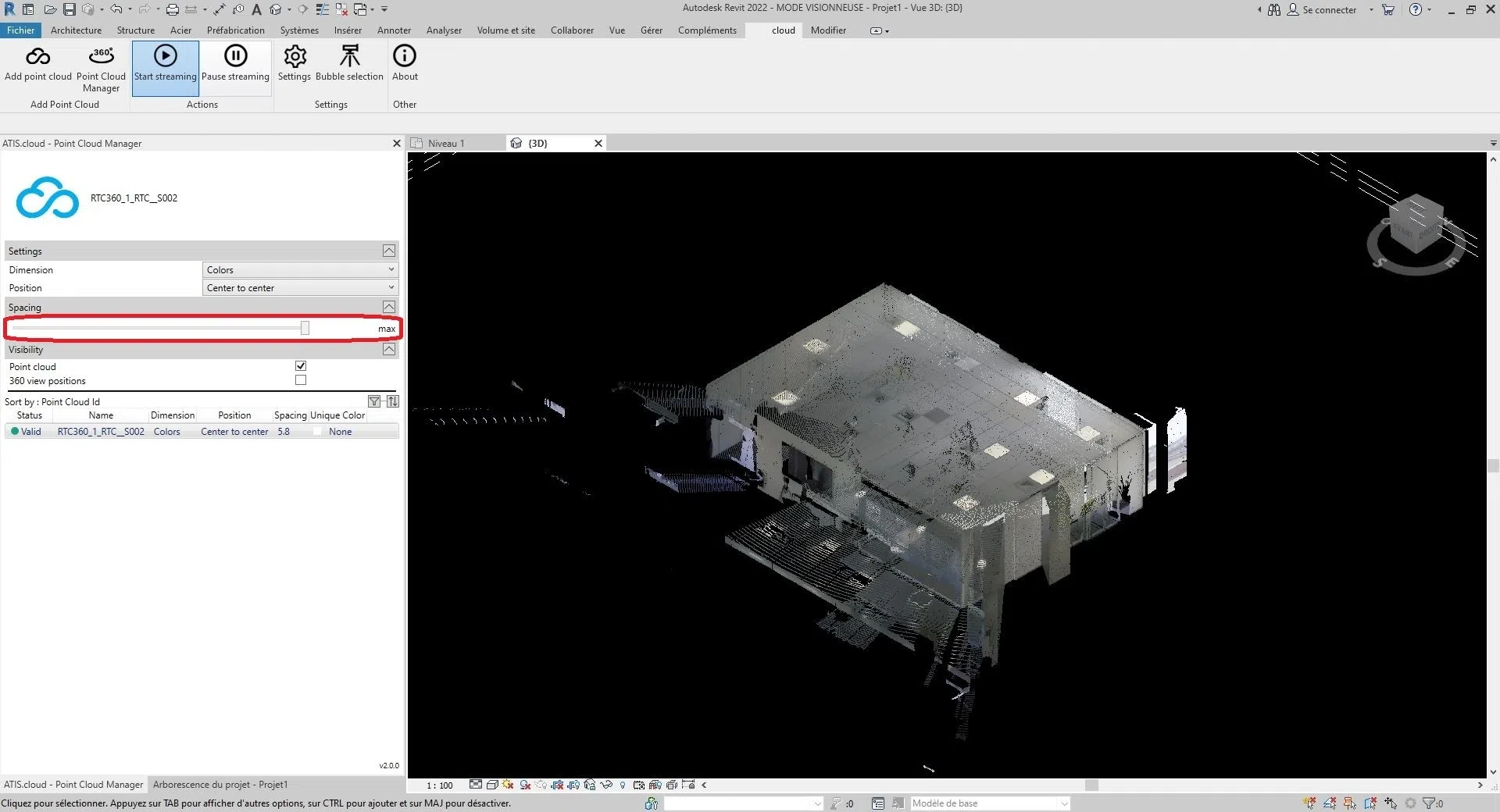
Cambiar espaciado:
Para modificar el espaciado entre los puntos de la nube, mueva la barra del apartado “Espaciado”.
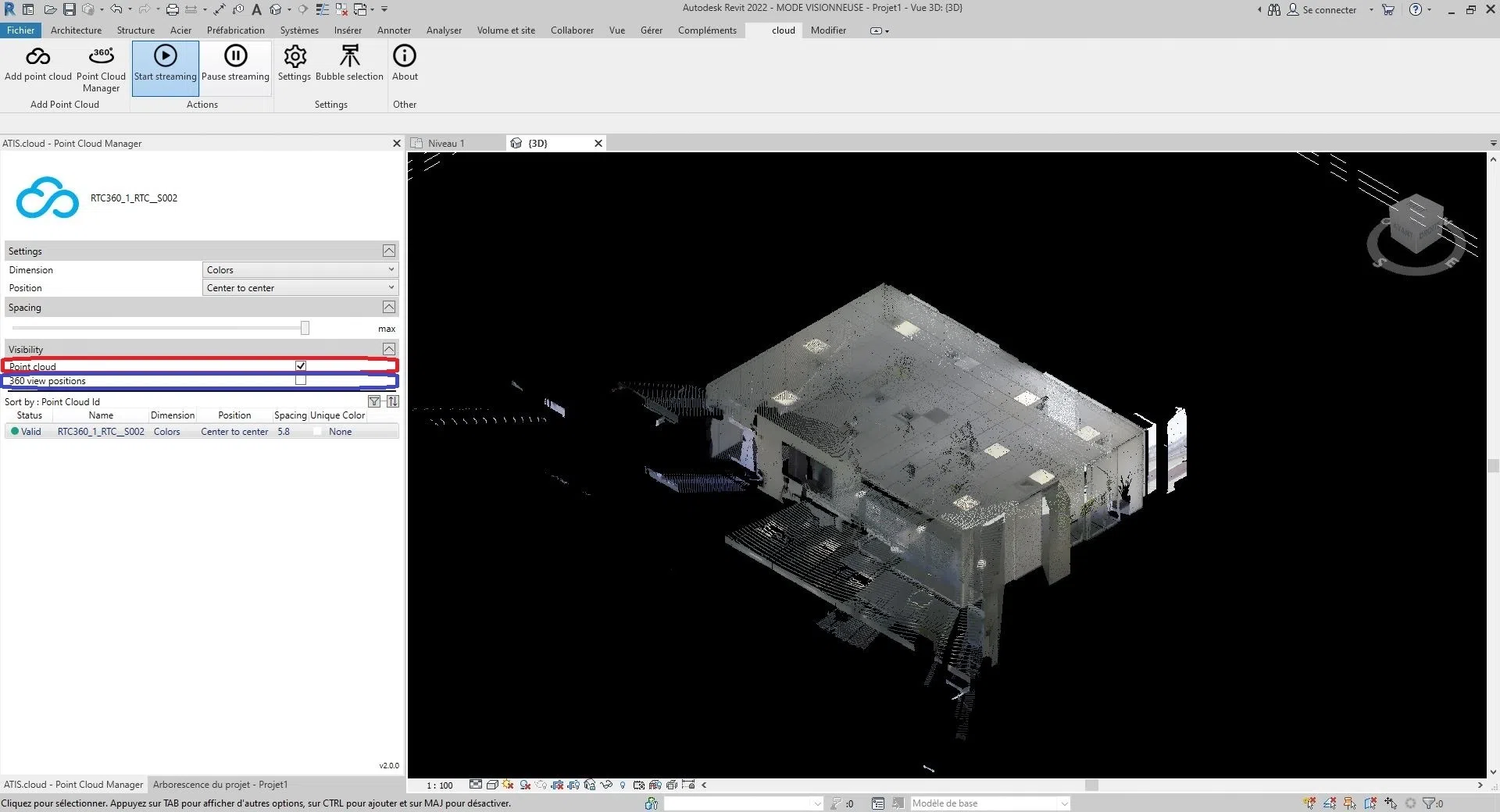
Cambiar visibilidad:
Para cambiar la visibilidad, tienes dos opciones. O puede mostrar/ocultar la nube de puntos marcando/desmarcando la casilla a la derecha de "Nube de puntos" en la sección "Visibilidad". O puede mostrar/ocultar los escáneres de nubes de puntos marcando/desmarcando la casilla a la derecha de "Vista 360" en la sección "Visibilidad". (La visibilidad es la misma entre las diferentes vistas del proyecto)
- Consejos:
- La información del escáner se encuentra en la categoría " Gestión de burbujas ".
- Para ampliar una nube de puntos en el visor, simplemente haga doble clic en la nube correspondiente.
¡Enhorabuena! Ya sabes todo sobre la interfaz "Point Cloud Manager".
Para obtener más información sobre la interacción entre el sitio web y Revit o, en general, sobre los escáneres, consulte el artículo " Gestión de burbujas ".
5. Insertar fuentes del proyecto en REVIT
Si el complemento de Revit no está instalado en su computadora, primero puede ir a la categoría "Instalación del complemento de Revit" y luego regresar a esta categoría después de esta operación.
Para agregar fuentes a un proyecto, primero debe agregar una nube de puntos. Si aún no lo ha hecho, vaya a la categoría "Insertar una nube de puntos en Revit".
Pasado un tiempo, tras añadir la nube de puntos, aparecerá un mensaje informándole de la detección de fuentes. (el tiempo varía según la cantidad de nubes en el proyecto y sus tamaños)
Tenga en cuenta que este cuadro de diálogo puede estar oculto detrás de una pestaña abierta en su computadora.

Luego tienes la posibilidad de agregar todas las fuentes del proyecto haciendo clic en “Sí” o de rechazar la adición haciendo clic en “No”.
Atención, esta acción es irreversible, para poder reinsertar las fuentes es necesario eliminar una nube resultante del proyecto donde se encuentran las fuentes y luego seguir las instrucciones de este artículo.

Bravo, has insertado las fuentes de un proyecto web.
Para obtener más información sobre cómo administrar la configuración de la nube de puntos, consulte la categoría "Administrador de nube de puntos".
6. Gestión de burbujas (imágenes 360) de una nube de puntos.
Si el complemento de Revit no está instalado en su computadora, primero puede ir a la categoría "Instalación del complemento de Revit" y luego regresar a esta categoría después de esta operación.
- Consejo: Para seguir completamente las instrucciones de este artículo, le recomendamos que haya seguido previamente la categoría “Administrador de nube de puntos” para mostrar los escáneres.
Los escáneres en Revit son objetos 3D que se insertan al mismo tiempo que la nube de puntos, con la diferencia de que son invisibles por defecto. Permite, gracias a una manipulación, cambiar la cámara del espectador del sitio web. Están representados por burbujas azules en el sitio y por un escáner en Revit.


Se le informará cuando se conecte o desconecte entre Revit y el sitio web mediante un cuadro de diálogo ubicado en la parte inferior derecha del visor web.
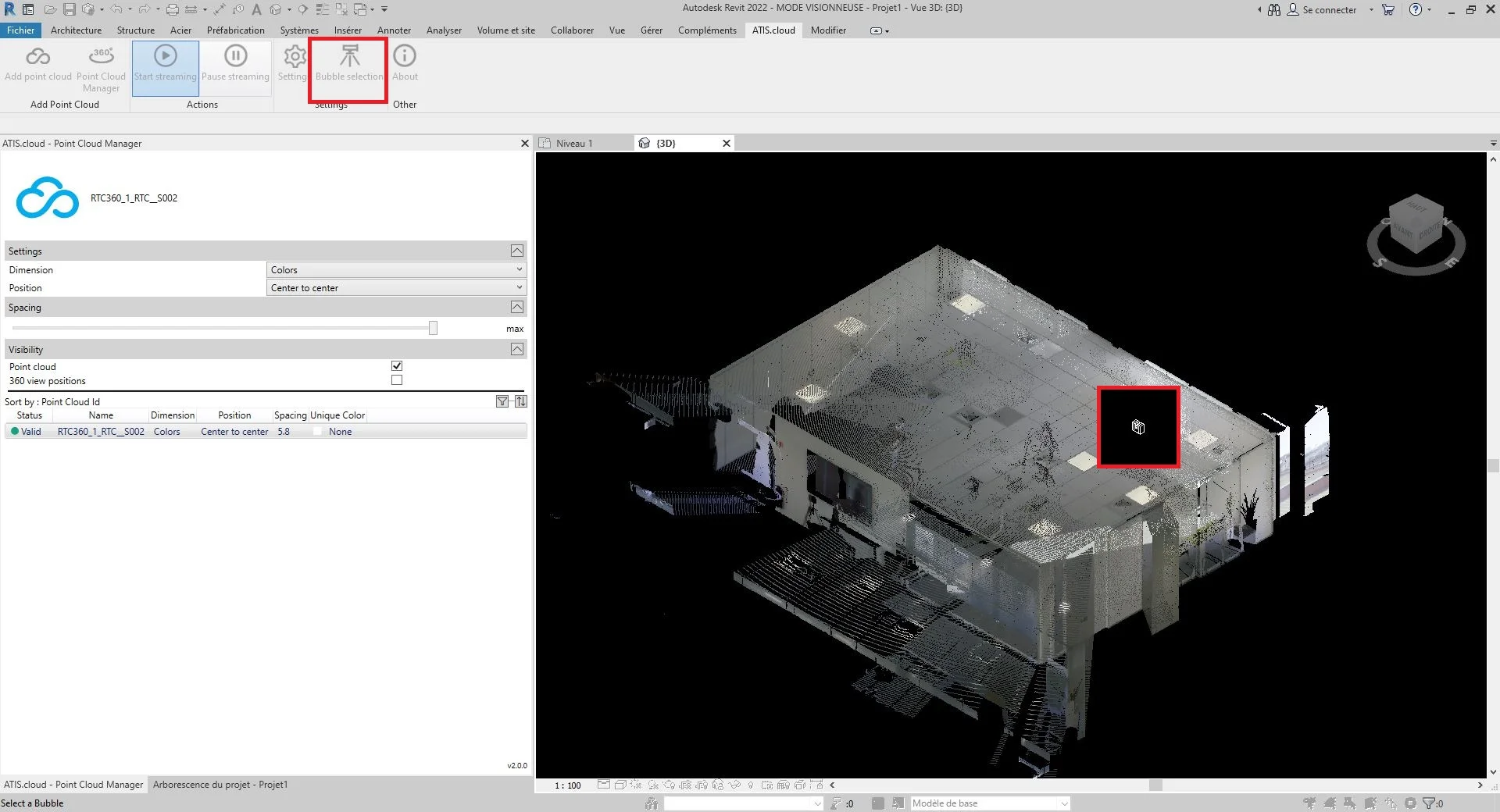
Una vez establecida la conexión, muestre los escáneres de una nube de puntos y luego presione "Selección de burbujas".
- Consejo: Para ver los escáneres directamente sin que la nube de puntos obstruya la visión, desmarque la visibilidad de la nube de puntos y haga visibles los escáneres.
Si la acción se realizó correctamente, el mouse entrará en modo de selección.
Puede salir de este modo presionando escape.
Seleccione un escáner haciendo clic en él.
El escáner modificó la vista en el visor web; seleccione en Revit.

- Información :
- Si la página web se cerró mientras usaba Revit, se creará una pestaña web que abrirá automáticamente el proyecto.
- Se recomienda cerrar el visor haciendo clic en el nombre ubicado en la parte superior izquierda para volver a la página de inicio. Si se utiliza otro método para salir de la página web, es posible que la conexión entre Revit y la aplicación web no se abra durante unos diez minutos.
¡Enhorabuena! Sabes cómo cambiar el punto de vista en el sitio web a través de Revit.
7. Desinstale el complemento REVIT
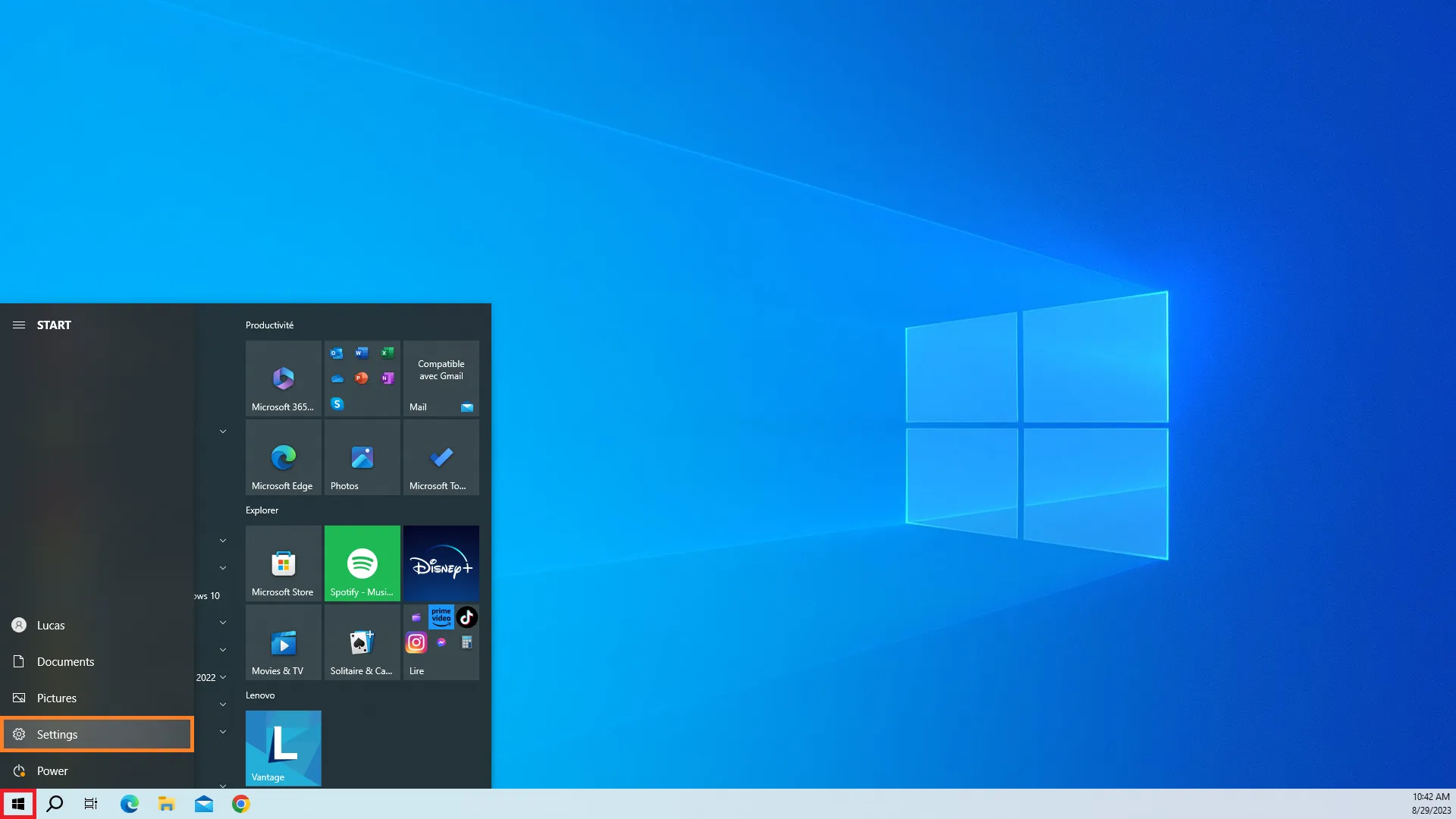
Comience abriendo la configuración de su computadora, puede encontrarla en el Menú de Windows.
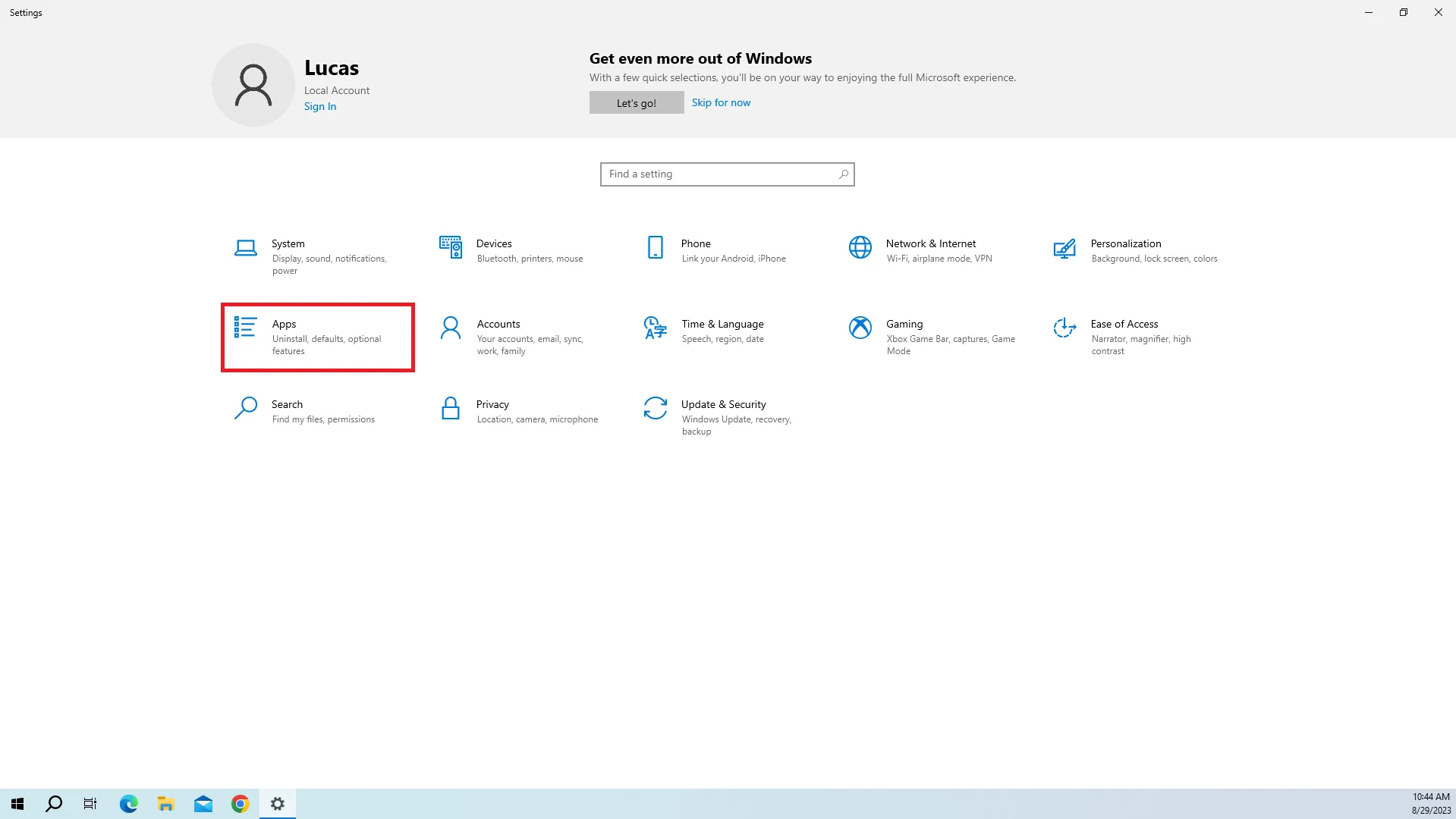
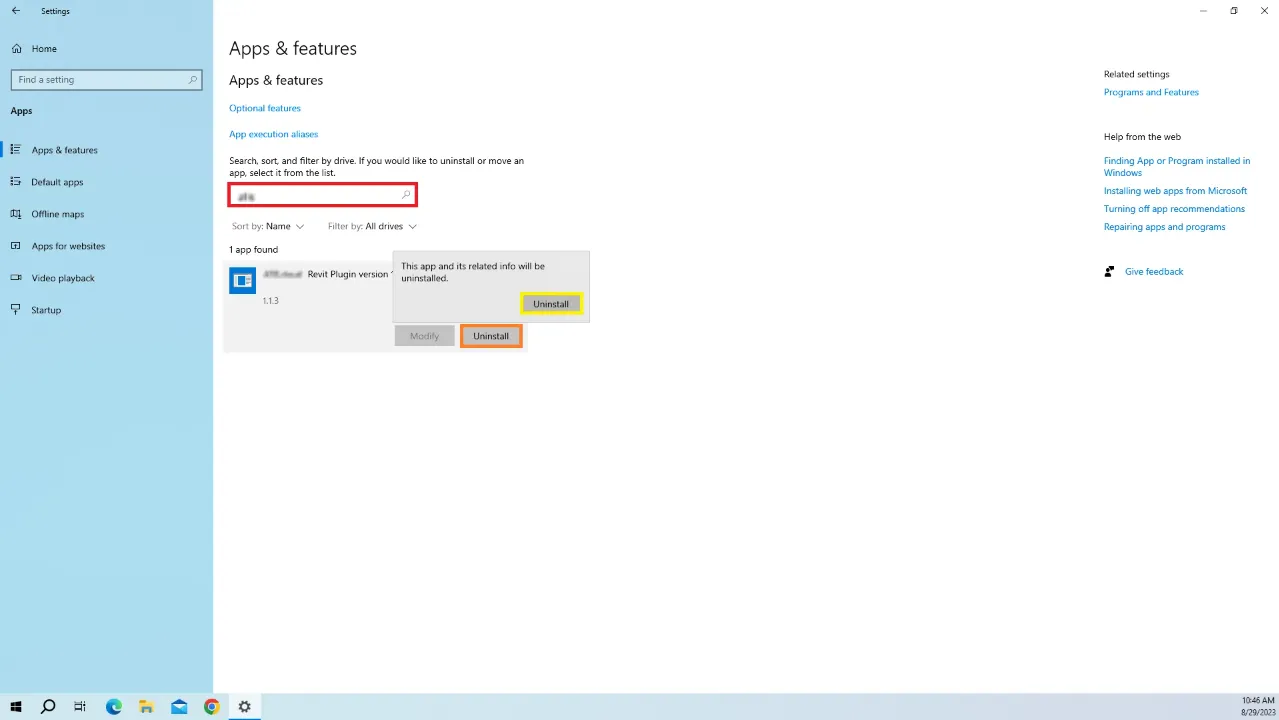
Abra la configuración de sus aplicaciones.
Busque "atis" y haga clic en Desinstalar , aparecerá una ventana emergente, haga clic en Desinstalar nuevamente para continuar.
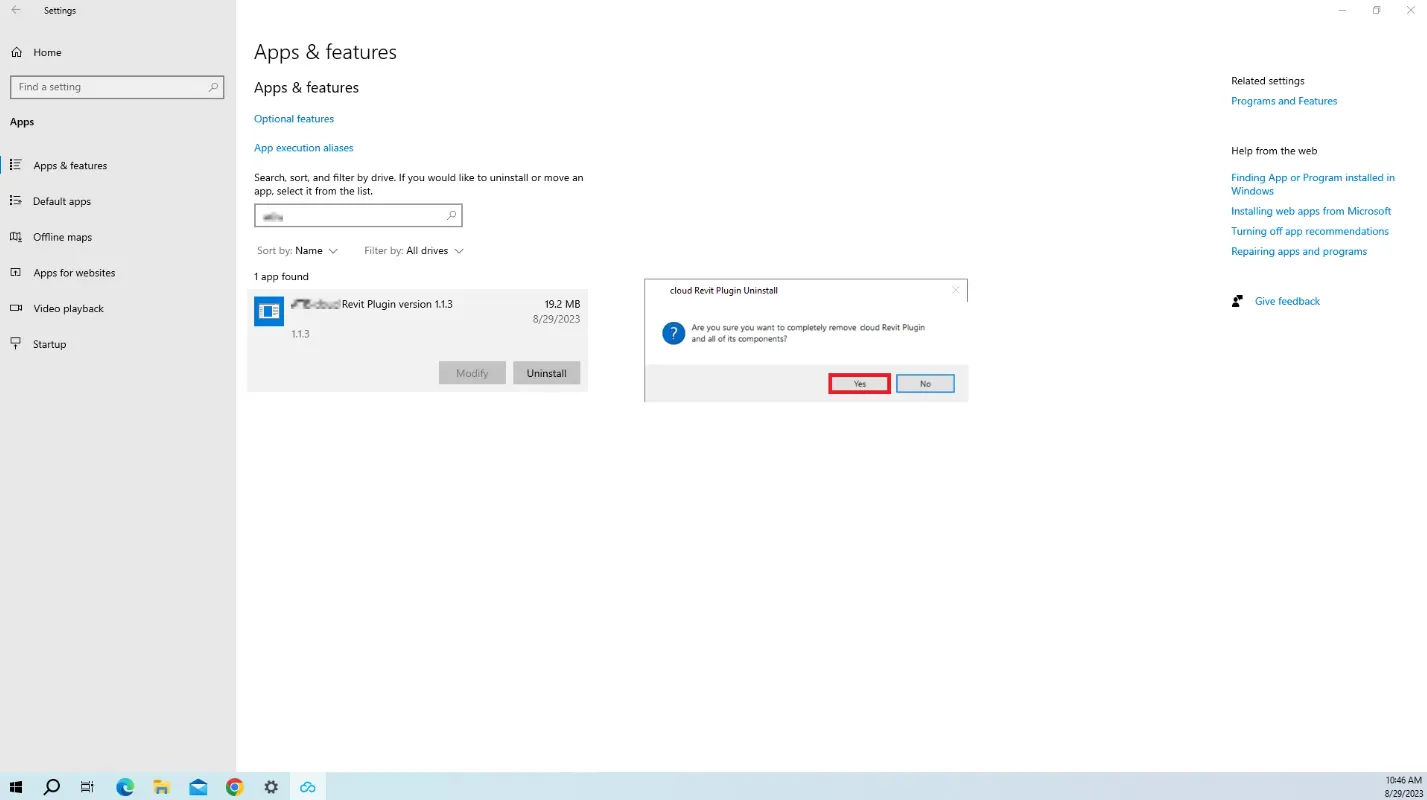
Haga clic en Sí para confirmar la supresión del complemento.
Espere a que finalice el proceso y haga clic en Aceptar. El complemento ahora ha sido desinstalado. Siempre puedes volver a instalarlo más tarde descargándolo nuevamente.
En caso de problema o dificultad, no dude en ponerse en contacto con el equipo de la plataforma.