
Información general
NavVis proporciona sistemas de mapas móviles para generar datos de alta calidad con precisión topográfica a velocidad y escala. Tienen diferentes tipos de escáneres que te ayudan a capturar el entorno muy rápido.
Según el tipo de escáner de NavVis con el que esté trabajando, el resultado de salida puede ser ligeramente diferente una vez que haya terminado el levantamiento.
Las herramientas de NavVis, ya sea en líneas de comando o a través de su interfaz, parten de datos que deben almacenarse en un directorio inicial "datasets_rec". En este directorio existe un subdirectorio por conjunto de datos cuyo nombre se compone de la siguiente manera: AAAA-MM-DD_HH.MM.SS.
Dentro de estos conjuntos de datos, puede encontrar los datos sin procesar de los diversos lidars (archivos bajos inutilizables como están) y fotos de unidades de gran angular que deberán ensamblarse.
Conjunto de datos de posprocesamiento
1. Debe realizar un procesamiento posterior del conjunto de datos y determinar el formato de salida de la nube de puntos .las o .e57 (de manera predeterminada, generará una nube de puntos .ply. Para la nube, se recomienda usar .las o .e57 desde .ply se utiliza para modelos 3D). Tenga en cuenta que puede procesar varios conjuntos de datos o un único conjunto de datos.

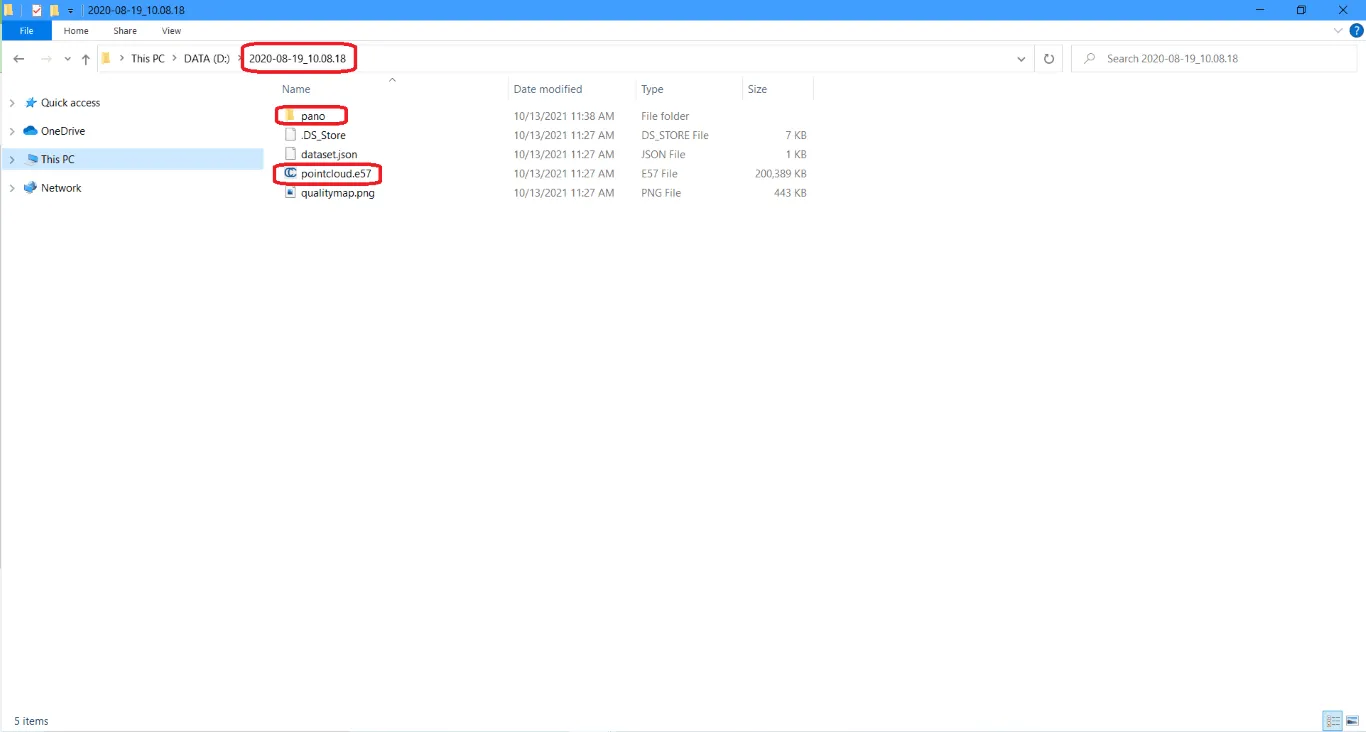
Este comando navvis-postprocessing generará una nube de puntos por conjunto de datos, así como fotos panorámicas equirrectangulares de 8192 x 4096 píxeles denominadas xxxxx-pano.jpg (donde xxxxx es un índice de 5 dígitos, por ejemplo, 00000-pano.jpg para la primera imagen ) así como un archivo CSV que indica la posición del centro de cada una de estas imágenes panorámicas en las coordenadas locales del conjunto de datos en cuestión (archivo pano-poses.csv).
Tenga en cuenta que la salida de los datos de NavVis no puede ser un e57 estructurado porque no hay estaciones dentro del e57.
2. Ahora que tienes la nube de puntos, verifica en la carpeta "pano" que tienes las imágenes panorámicas y un archivo CSV indicando la posición del centro de cada una de estas imágenes panorámicas en las coordenadas locales del dataset en cuestión (pano -archivo poses.csv).

3. Comprima la carpeta panorámica (con imágenes panorámicas y el archivo csv)
4. Ahora que tiene la nube de puntos y las imágenes panorámicas, puede agregarlas al proyecto en la nube. Solo necesitas subir la nube de puntos y el archivo zip.
Para saber cómo subir un archivo a un proyecto, lea el artículo "Agregar archivos al proyecto" y para imágenes panorámicas lea el artículo "Agregar imágenes de 360°".
Si tiene alguna pregunta o necesita más información, póngase en contacto con el equipo técnico.