
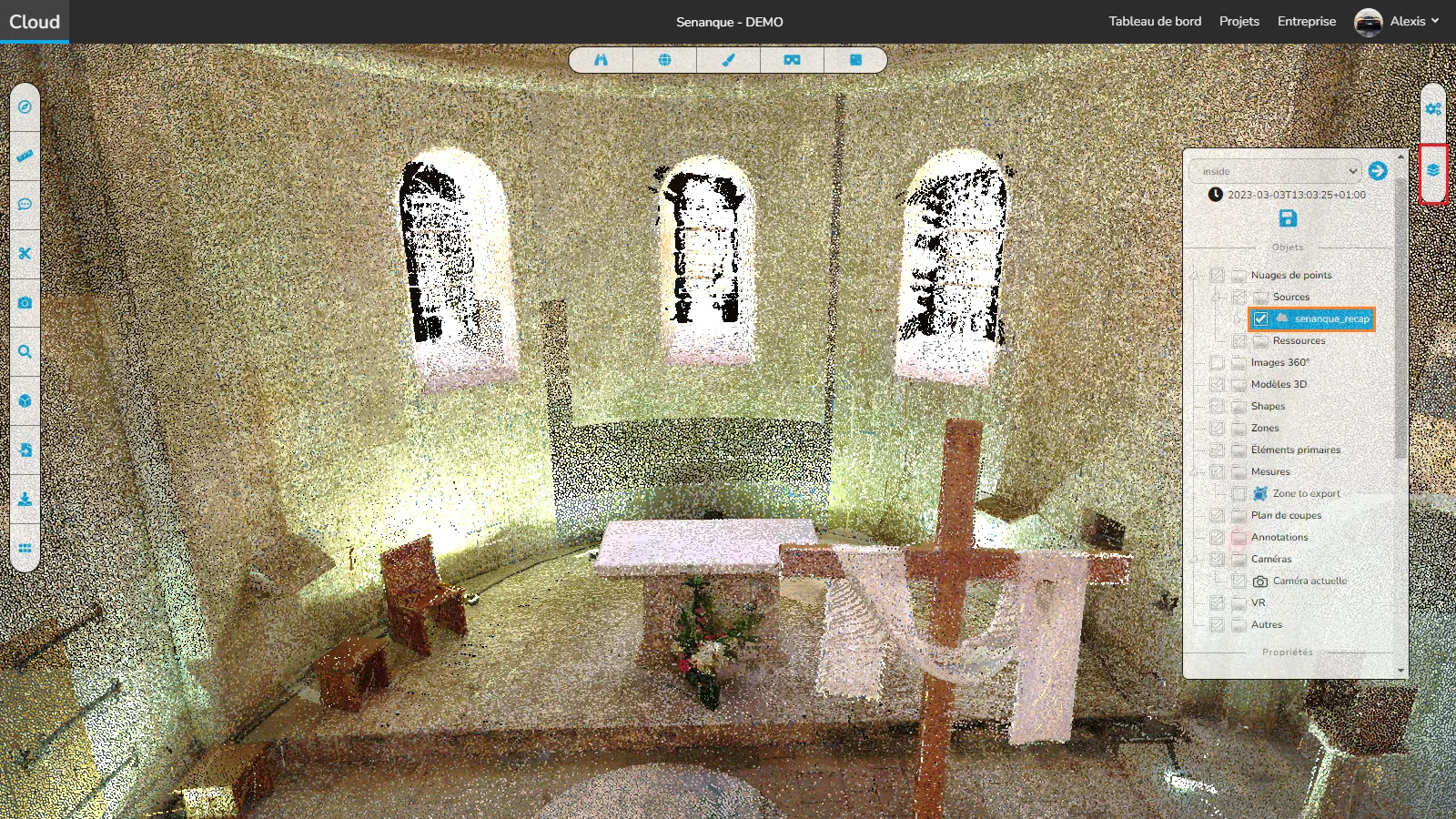
Pour trouver le nuage de points attribué, ouvrez le menu Scène et cliquez sur le nuage de points que vous souhaitez sélectionner. Ensuite, faites défiler vers le bas pour trouver l'option.
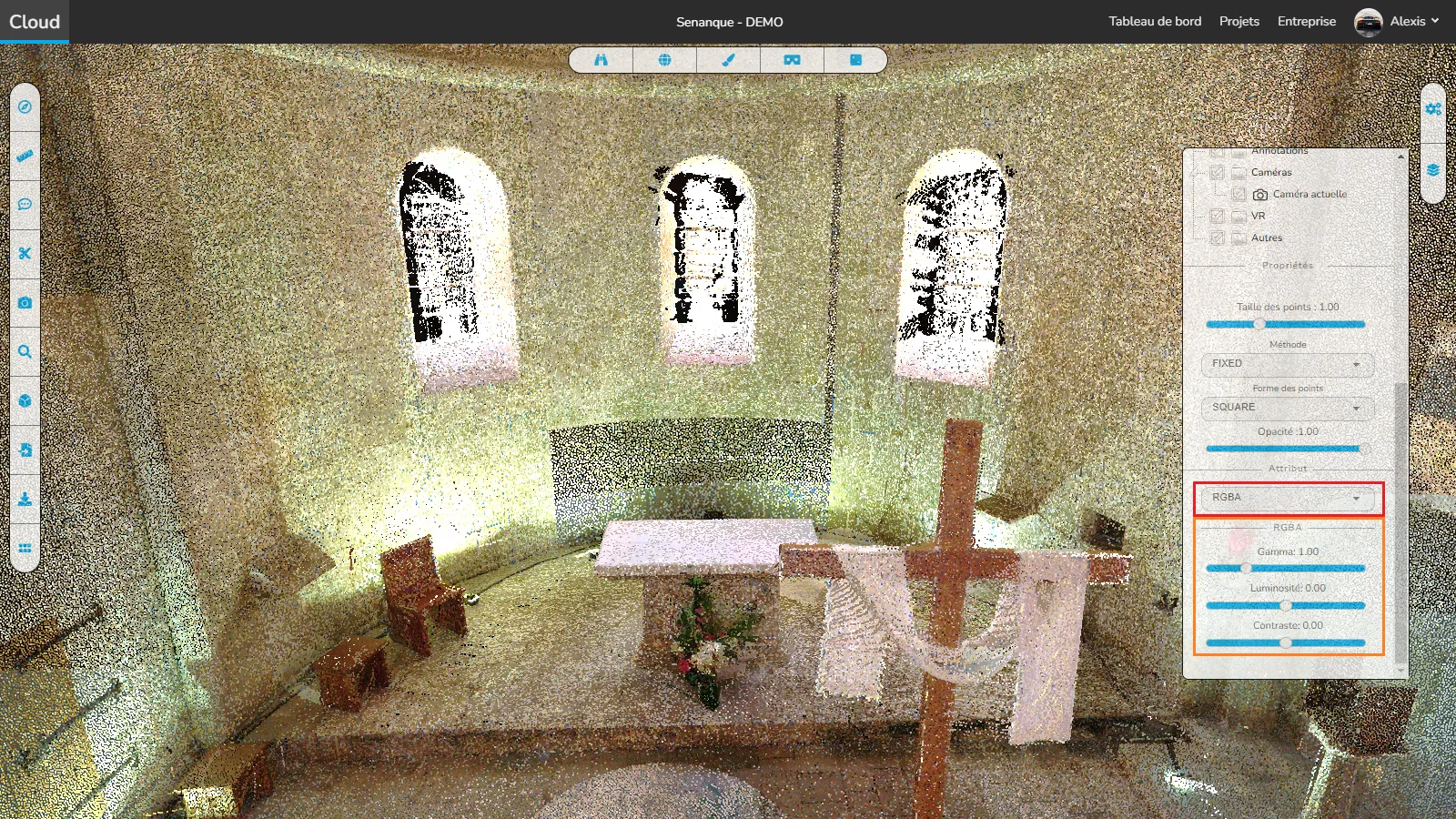
La catégorie Attribut est maintenant apparue, ici vous pouvez trouver un select , cela vous permet de choisir comment vous voulez changer votre visuel de nuage de points, vous devriez l'utiliser si vous souhaitez changer le contraste ou si votre nuage de points ne le fait pas montrez le bon chemin (s'il apparaît tout noir par exemple), changez ou corrigez la coloration, enlevez les couleurs pour obtenir du noir et blanc à la place, passez du noir et blanc au coloré etc...
Lorsque vous modifiez la valeur dans le select , vous verrez que l' option en dessous changera.
Vous trouverez ici une liste de toutes les valeurs disponibles avec leur utilisation et les options associées :
- Analyse : Ne fonctionnera qu'avec des nuages de points d'analyse, pour plus d'informations sur l'analyse, consultez cet article .
- Nom : Changer le nom du nuage de points
- Voir le poste
- Voir la rotation
- Voir l'échelle
- Supprimer l'analyse (la supprimera uniquement de la visionneuse, elle pourra être rechargée ultérieurement s'il s'agit d'une analyse côté serveur)
- Classification : Ne fonctionnera qu'avec des nuages de points compatibles. L'objectif de la classification est de regrouper des points similaires dans des catégories significatives, telles que le sol, la végétation, les bâtiments et d'autres objets.
- Afficher / masquer tout : affiche ou masque toutes les catégories
- Une ligne par catégorie, cliquez sur la ligne pour l'afficher/masquer, cliquez sur la couleur pour la changer
- Couleur : Colorie tout le nuage de points avec 1 couleur
- Sélectionnez une couleur à l'aide de la palette
- Utilisez un code hexadécimal pour sélectionner la couleur
- Choisissez une couleur dans la liste par défaut
- Composite : Utilisez cette option si vous souhaitez utiliser plusieurs options en même temps, faites glisser les curseurs pour augmenter/diminuer leur utilisation.
- RGBA : Nuage de points colorisé
- Gamma : Fondamentalement, l'exposition du nuage de points, un gamma inférieur est égal à une exposition plus élevée, un gamma supérieure, une exposition inférieure, donne un aspect de coucher de soleil
- Luminosité : La luminosité du nuage de points, une luminosité plus faible le rendra plus sombre, une luminosité plus élevée le rendra plus clair.
- Contraste : Modifie le contraste du nuage de points, un contraste plus faible rendra le nuage de points gris, un contraste plus élevé surexposera les couleurs standard (rouge, jaune, vert, bleu…)
- Intensité : Force ou amplitude du signal
- Plage : De faible intensité à forte
- Gamma : Fondamentalement, l'exposition du nuage de points, un gamma inférieur est égal à une exposition plus élevée, un gamma supérieure, une exposition inférieure, donne un aspect de coucher de soleil
- Luminosité : La luminosité du nuage de points, une luminosité plus faible le rendra plus sombre, une luminosité plus élevée le rendra plus clair.
- Contraste : Modifie le contraste du nuage de points, un contraste plus faible rendra le nuage de points gris, un contraste plus élevé surexposera les couleurs standard (rouge, jaune, vert, bleu…)
- Altitude : Hauteur ou position verticale de chaque point
- Plage d'élévation : définir où le gradient commence et se termine en termes de hauteur
- Mode dégradé
- Pince : Dégradé standard, hors plage, conserve la couleur finale de la tranche
- Répétition : Lorsque le dégradé se termine, recommence à partir de la couleur d'origine
- Répétition miroir : Lorsque le dégradé se termine, met un nouveau dégradé inversé. Similaire à la répétition sauf qu'il n'y a pas de discontinuité de couleur
- Schéma de dégradé : Modifier les couleurs du dégradé, sélection dans une liste prédéfinie uniquement
- Analyse : Uniquement si disponible sur ce nuage de points , comparaison modèle à nuage de points
- Classification : Uniquement si disponible sur ce nuage de points , divise différents types d'objets (sol, végétation, bâtiments…)
- Numéro de retour : nombre d'impulsions nécessaires pour obtenir ce point
- ID de source ponctuelle : regroupés par ID d'analyse
- RGBA : Nuage de points colorisé
- Altitude : Elle représente la hauteur ou la position verticale de chaque point. Les données d'altitude sont importantes dans de nombreuses applications de nuages de points, telles que la cartographie topographique, la modélisation des inondations, la planification urbaine et la conception d'infrastructures. En analysant les données d'élévation, il est possible de créer des modèles numériques d'élévation (DEM) précis et détaillés qui peuvent être utilisés pour un large éventail d'analyses géospatiales et à des fins de visualisation.
- Plage d'élévation : définir où le gradient commence et se termine en termes de hauteur
- Mode dégradé
- Clamp : Dégradé standard, hors plage, conserve la couleur finale de la tranche
- Répéter : lorsque le dégradé se termine, recommence à partir de la couleur d'origine
- Répétition miroir : Lorsque le dégradé se termine, met un nouveau dégradé inversé, similaire à la répétition sauf qu'il n'y a pas de discontinuité de couleur
- Schéma de dégradé : Modifier les couleurs du dégradé, sélection dans une liste prédéfinie uniquement
- Temps GPS : Le temps GPS est un attribut important associé à chaque point du nuage de points. Il fournit des informations sur l'heure à laquelle l'impulsion laser a été émise et l'heure à laquelle l'impulsion de retour a été reçue, permettant un calcul précis de la distance et de la position du point. En outre, le temps GPS peut également être utilisé à des fins de contrôle de la qualité et d'analyse. En analysant la distribution des valeurs de temps GPS sur le nuage de points, il est possible d'identifier les zones présentant des anomalies ou des erreurs temporelles, qui peuvent indiquer des problèmes avec les données ou le système LiDAR.
- Indices : Les indices sont des attributs associés à chaque point dans un nuage de points LiDAR qui fournissent des informations supplémentaires sur les propriétés spatiales du point et les relations avec d'autres points dans le nuage. Ils sont souvent utilisés pour prendre en charge des tâches d'analyse et de traitement avancées, telles que la segmentation, la classification et l'extraction de caractéristiques. Plusieurs types d'indices peuvent être utilisés dans le traitement des nuages de points LiDAR, notamment :
- Vecteur normal : Cet indice représente l'orientation du point par rapport à son voisinage local. Il peut être utilisé pour identifier des surfaces planes ou pour estimer les normales de surface pour la reconstruction de surface.
- Courbure : Cet indice représente la courbure locale de la surface au point. Il peut être utilisé pour identifier les arêtes vives ou pour estimer le rayon de courbure des surfaces courbes.
- Hauteur au-dessus du sol : Cet indice représente la hauteur du point au-dessus du sol ou d'une surface de référence. Il peut être utilisé pour la modélisation du terrain ou pour identifier des objets situés au-dessus ou en dessous de la surface du sol.
- Hauteur relative : Cet indice représente la hauteur du point par rapport à ses points voisins. Il peut être utilisé pour identifier des objets qui sont plus hauts ou plus bas que leur environnement.
- Densité : Cet indice représente la densité de points dans le voisinage local autour du point. Il peut être utilisé pour identifier les zones à forte ou faible densité de points, telles que la végétation ou les façades de bâtiments.
- Intensité : Elle représente la force ou l'amplitude du signal qui a été reçu par un capteur ou un appareil lorsque le point a été capturé. Dans certains cas, l'intensité est liée à la réflectance de l'objet à ce point. Par exemple, dans un nuage de points LiDAR, la valeur d'intensité représente la quantité de lumière laser qui a été réfléchie vers le capteur par l'objet. Dans ce cas, une valeur d'intensité plus élevée indiquerait une surface qui réfléchit plus de lumière, comme un mur blanc, tandis qu'une valeur d'intensité plus faible indiquerait une surface qui réfléchit moins de lumière, comme une voiture noire. Dans d'autres cas, l'intensité peut représenter une quantité physique différente. Par exemple, dans un nuage de points photographique, l'intensité peut représenter la luminosité d'un pixel de l'image d'origine qui a été utilisée pour générer le nuage de points.
- Plage : De faible intensité à forte
- Gamma : Fondamentalement, l'exposition du nuage de points, un gamma inférieur est égal à une exposition plus élevée, un gamma supérieure, une exposition inférieure, donne un aspect de coucher de soleil
- Luminosité : La luminosité du nuage de points, une luminosité plus faible le rendra plus sombre, une luminosité plus élevée le rendra plus clair.
- Contraste : Modifie le contraste du nuage de points, un contraste plus faible rendra le nuage de points gris, un contraste plus élevé surexposera les couleurs standard (rouge, jaune, vert, bleu…)
- Gradient d'intensité : C'est une mesure du changement d'intensité entre des points voisins dans un nuage de points. Il représente la vitesse à laquelle l'intensité change en fonction de la distance ou de la position. Le gradient d'intensité est calculé en prenant le gradient des valeurs d'intensité dans le nuage de points. Cela implique de calculer les dérivées partielles des valeurs d'intensité par rapport aux coordonnées x, y et z de chaque point. L'amplitude du vecteur gradient à chaque point représente la valeur du gradient d'intensité. Des valeurs élevées de gradient d'intensité indiquent des arêtes ou des limites nettes, tandis que des valeurs faibles indiquent des transitions douces ou graduelles.
- Plage : De faible intensité à forte
- Gamma : Fondamentalement, l'exposition du nuage de points, un gamma inférieur est égal à une exposition plus élevée, un gamma supérieure, une exposition inférieure, donne un aspect de coucher de soleil
- Luminosité : La luminosité du nuage de points, une luminosité plus faible le rendra plus sombre, une luminosité plus élevée le rendra plus clair.
- Contraste : Modifie le contraste du nuage de points, un contraste plus faible rendra le nuage de points gris, un contraste plus élevé surexposera les couleurs standard (rouge, jaune, vert, bleu…)
- Niveau de détail : Dans le traitement des nuages de points LiDAR, le niveau de détail (LOD) peut faire référence à la densité de points dans le nuage de points, à la résolution des données ou au niveau d'abstraction utilisé pour représenter les données. Par exemple, un nuage de points avec un haut niveau de détail aurait une haute densité de points, une haute résolution et un niveau d'abstraction fin. À l'inverse, un nuage de points avec un faible niveau de détail aurait une densité de points plus faible, une résolution plus faible et un niveau d'abstraction grossier.
- Matcap : Dans le traitement des nuages de points LiDAR, matcap peut être utilisé pour ajouter des textures visuelles et des effets d'ombrage aux modèles 3D créés à partir de nuages de points. En appliquant une texture matcap à un modèle 3D, il est possible de créer une représentation plus réaliste et visuellement attrayante de la scène. Par exemple, une texture matcap peut être utilisée pour simuler l'apparence d'un mur en béton ou d'une écorce d'arbre, ajoutant de la profondeur et du réalisme au modèle 3D.
- Sélectionnez la texture à appliquer
- Nombre de retours : Il représente le nombre total d'impulsions laser qui ont été émises et renvoyées au capteur LiDAR pour capturer ce point particulier. Semblable au nombre de retours, le nombre de retours peut varier de 1 à 5 ou plus, selon le système LiDAR utilisé. Le nombre total de retours peut fournir des informations sur la complexité et la structure de l'objet ou de la scène en cours de numérisation. Par exemple, un point avec un nombre élevé de retours peut indiquer un objet avec plusieurs couches ou une géométrie complexe, comme un couvert forestier ou une façade de bâtiment.
- ID de source ponctuelle : Il identifie le capteur laser spécifique qui a généré le point. Chaque capteur laser d'un système LiDAR possède un identifiant ou un numéro unique, et cette information est enregistrée dans les données du nuage de points pour permettre l'analyse et le contrôle de la qualité. L'identification de source ponctuelle est particulièrement utile dans les situations où plusieurs capteurs LiDAR sont utilisés pour capturer une seule scène ou zone. En identifiant quel capteur a généré chaque point, il est possible d'effectuer des contrôles de qualité sur les données et de s'assurer que les données sont correctement alignées et enregistrées entre les différents capteurs. Ceci est particulièrement important dans des applications telles que la foresterie, où plusieurs capteurs LiDAR peuvent être utilisés pour capturer des données sous différents angles et perspectives. Sur notre plate-forme, l'identifiant de la source ponctuelle est utilisé pour stocker l'identifiant de l'analyse source, ce qui permet aux utilisateurs de suivre facilement de quelle analyse provient chaque point du nuage de points. Par exemple, si plusieurs numérisations ont été effectuées sur la même zone à l'aide d'un scanner laser 3D, chaque numérisation pourrait se voir attribuer un identifiant de numérisation unique et l'attribut d'identifiant de source ponctuelle pour chaque point du nuage de points pourrait être défini sur l'identifiant de numérisation correspondant.
- RGBA : Il est utilisé pour représenter la couleur de chaque point dans le nuage de points. Les canaux rouge, vert et bleu sont utilisés pour représenter la couleur du point, tandis que le canal alpha est utilisé pour représenter la transparence ou l'opacité du point. L'utilisation de la couleur dans les nuages de points LiDAR peut être utile à des fins de visualisation et d'interprétation, car elle peut fournir des informations supplémentaires sur les propriétés des objets et des surfaces représentés par les points. Par exemple, dans la cartographie de la végétation, la couleur des points peut être utilisée pour distinguer différents types de végétation ou pour identifier les zones à forte ou faible densité de végétation.
- Gamma : Fondamentalement, l'exposition du nuage de points, un gamma inférieur est égal à une exposition plus élevée, un gamma supérieure, une exposition inférieure, donne un aspect de coucher de soleil
- Luminosité : La luminosité du nuage de points, une luminosité plus faible le rendra plus sombre, une luminosité plus élevée le rendra plus clair.
- Contraste : Modifie le contraste du nuage de points, un contraste plus faible rendra le nuage de points gris, un contraste plus élevé surexposera les couleurs standard (rouge, jaune, vert, bleu…)
- Nombre de retour : Il représente le nombre de fois qu'une impulsion laser a été émise et renvoyée au capteur LiDAR afin de capturer ce point particulier. Semblable au nombre de retours, le numéro de retour est généralement une valeur comprise entre 1 et 5, 1 indiquant le premier retour et 5 indiquant le cinquième retour. Le premier retour représente l'impulsion laser qui est réfléchie depuis la surface supérieure de l'objet, tandis que les retours suivants peuvent représenter des réflexions depuis des surfaces inférieures ou des réflexions multiples à l'intérieur de l'objet.
- Rang d'angle de balayage : Il représente l'angle entre le faisceau laser et la ligne de référence du scanner lorsque l'impulsion laser a été émise pour capturer ce point particulier. Le rang d'angle de balayage fournit des informations sur l'angle auquel le point a été capturé, avec une valeur de 0 indiquant la ligne de référence du scanner et des valeurs positives ou négatives indiquant l'écart par rapport à la ligne de référence. Dans l'extraction de bâtiments, le rang d'angle de balayage peut être utilisé pour identifier les façades de bâtiments et les structures de toit en fonction de leur orientation par rapport à la ligne de référence du scanner. Dans l'analyse de la surface de la route, le rang d'angle de balayage peut être utilisé pour détecter les défauts de surface ou les irrégularités en fonction de l'angle du scanner par rapport à la surface de la route.
- Données utilisateur : Elles permettent aux utilisateurs d'ajouter des informations supplémentaires au nuage de points au-delà des attributs standard tels que les coordonnées XYZ, l'intensité et le numéro de retour. Les données utilisateur peuvent être utilisées pour stocker un large éventail d'informations, telles que les valeurs de couleur RVB, les étiquettes de classification ou les métadonnées associées au point. Par exemple, les données utilisateur peuvent être utilisées pour indiquer si un point fait partie d'un bâtiment, d'un arbre ou d'une route, ou pour stocker des informations sur la qualité de la mesure du point ou son incertitude. L'utilisation des données utilisateur dépend des besoins et des applications spécifiques de l'utilisateur. Il peut être utilisé pour une variété de tâches, telles que la reconnaissance d'objets, la classification, la segmentation et la cartographie. En ajoutant des données utilisateur personnalisées à un nuage de points, il est possible d'extraire des informations plus significatives et d'effectuer des tâches d'analyse et de traitement plus avancées.
Si votre nuage de points ne s'affiche pas dans le bon sens au début, essayez les attributs RGBA ou d'intensité car ce sont les plus utilisés.