
Informations générales
NavVis fournit des systèmes de cartographie mobile pour générer des données de haute qualité avec une précision de niveau topographique à la vitesse et à l'échelle. Ils ont différents types de scanners qui vous aident à capturer l'environnement très rapidement.
Selon le type de scanner de NavVis que vous utilisez, le résultat de sortie peut être légèrement différent une fois que vous avez terminé le levé.
Les outils NavVis, que ce soit en ligne de commande ou via leur interface, partent de données qui doivent être stockées dans un répertoire initial "datasets_rec". Dans ce répertoire, il y a un sous-répertoire par jeu de données dont le nom est composé comme suit : AAAA-MM-JJ_HH.MM.SS.
A l'intérieur de ces jeux de données, vous pourrez retrouver les données brutes des différents lidars (fichiers bas inexploitables en l'état) et des photos unitaires grand angle qu'il faudra assembler.
Jeu de données de post-traitement
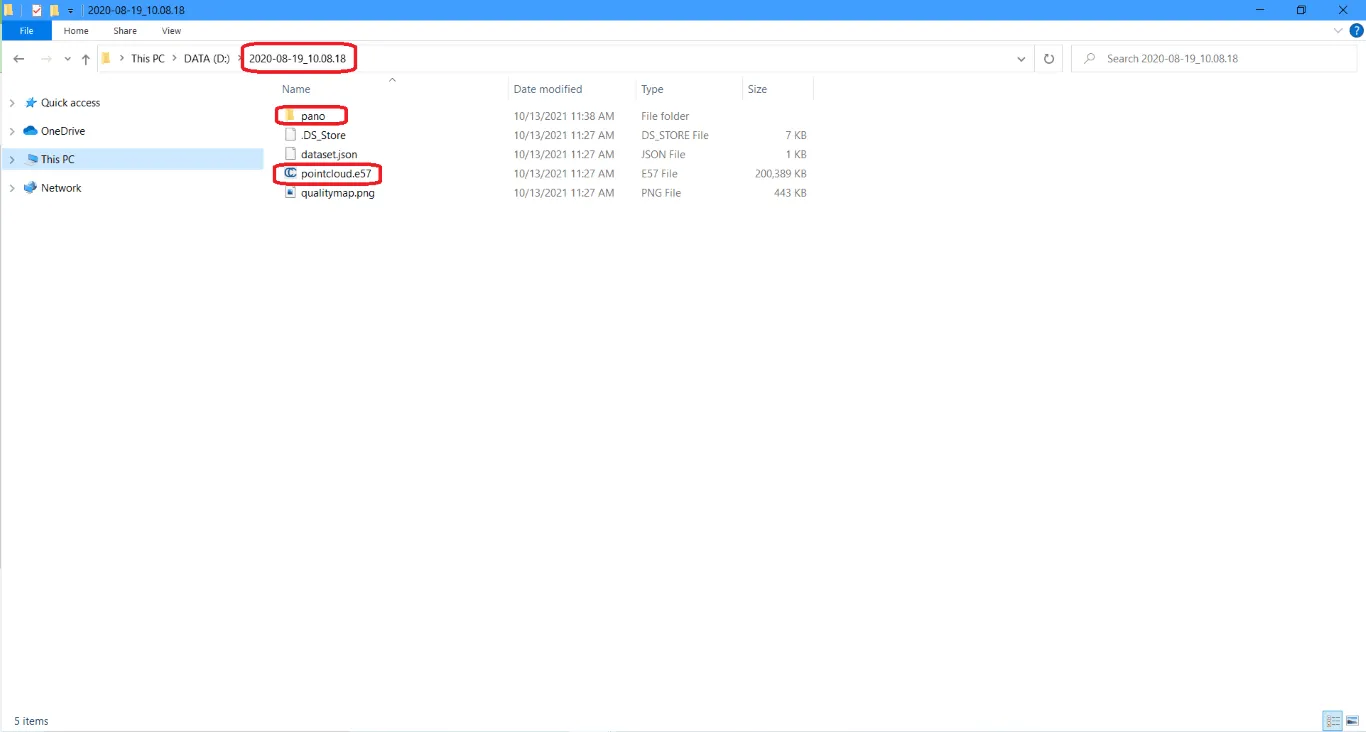
1. Vous devez post-traiter l'ensemble de données et déterminer le format de sortie du nuage de points .las ou .e57 (par défaut, il générera un nuage de points .ply. Pour le nuage, il est recommandé d'utiliser .las ou .e57 puisque .ply est utilisé pour les modèles 3D). Notez que vous pouvez traiter plusieurs jeux de données ou un seul jeu de données.

Cette commande navvis-postprocessing va générer un nuage de points par jeu de données ainsi que des photos panoramiques équirectangulaires de 8192 x 4096 pixels nommées xxxxx-pano.jpg (où xxxxx est un index à 5 chiffres, par exemple 00000-pano.jpg pour la première image ) ainsi qu'un fichier CSV indiquant la position du centre de chacune de ces images panoramiques dans les coordonnées locales du jeu de données considéré (fichier pano-poses.csv).
Veuillez noter que la sortie des données NavVis ne peut pas être un e57 structuré, car il n'y a pas de stations à l'intérieur du e57.
2. Maintenant que vous avez le nuage de points, vérifiez dans le dossier "pano" que vous avez les images panoramiques et un fichier CSV indiquant la position du centre de chacune de ces images panoramiques dans les coordonnées locales du jeu de données en question (pano -poses.csv).

3. Compressez le dossier pano (avec les images panoramiques et le fichier csv)
4. Maintenant que vous avez le nuage de points et les images panoramiques, vous pouvez les ajouter au projet sur le cloud. Il vous suffit de télécharger le nuage de points et le fichier zip.
Pour savoir comment charger un fichier dans un projet, veuillez lire l'article "Ajouter des fichiers au projet" et pour les images panoramiques, lisez l'article "Ajouter des images à 360°".
Si vous avez des questions ou avez besoin de plus d'informations, veuillez contacter l'équipe technique.