パノラマ画像を含む NavVis データセットをインポートする
一般情報
NavVis は、測量級の精度を備えた高品質データ�を高速かつ大規模に生成するモバイル マッピング システムを提供します。さまざまなタイプのスキャナーがあり、環境を迅速にキャプチャするのに役立ちます。
使用している NavVis のスキャナーの種類によっては、測量終了後の出力結果が若干異なる場合があります。
NavVis ツールは、コマンド ラインまたはインターフェイス経由で、初期ディレクトリ "datasets\_rec" に保存されるデータから開始します。このディレクトリには、データセットごとに 1 つのサブディレクトリがあり、その名前は YYYY-MM-DD\_HH.MM.SS のように構成されます。
これらのデータセット内には、さまざまな LIDAR からの生データ (そのままでは使用できない低ファイル) と、組み立てる必要がある広角ユニット写真が含まれています。
後処理データセット
1. データセットを後処理し、点群出力形式 .las または .e57 を決定する必要があります (デフォルトでは .ply 点群が生成されます。クラウドの場合は .ply であるため、.las または .e57 を使用することをお勧めします) 3D モデルに使用されます)。複数のデータセットまたは単一のデータセットを処理できることに注意してください。

この navvis-postprocessing コマンドは、データセットごとに点群を生成するとともに、xxxxx-pano.jpg という名前の 8192 x 4096 ピクセルの正距円筒パノラマ写真を生成します (xxxxx は 5 桁のインデックスです。たとえば、最初の画像の場合は 00000-pano.jpg) ) と、問題のデータセットのローカル座標におけるこれらの各パノ��ラマ画像の中心の位置を示す CSV ファイル (pano-poses.csv ファイル)。
e57 内にはステーションがないため、NavVis データの出力は構造化された e57 にはならないことに注意してください。
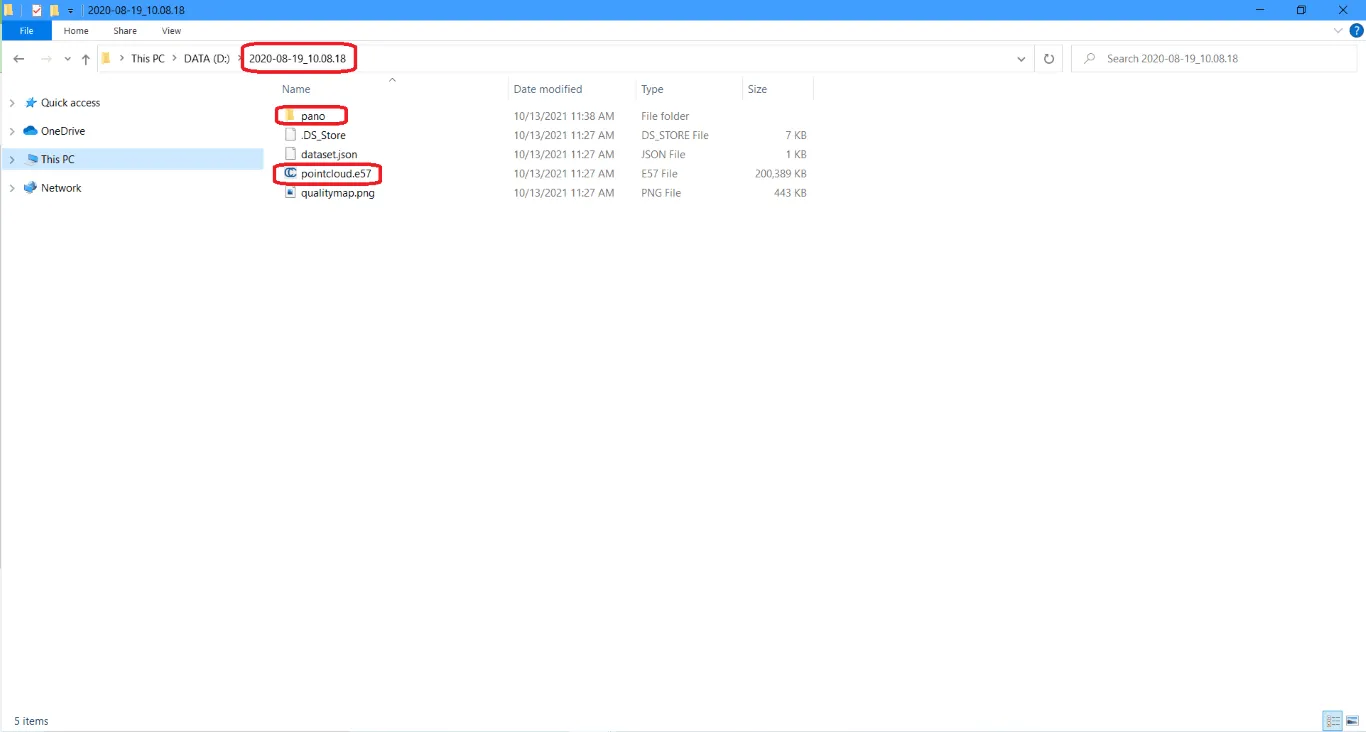
2. 点群を取得したので、フォルダー「pano」にパノラマ画像と、問題のデータセットのローカル座標におけるこれらの各パノラマ画像の中心の位置を示す CSV ファイルがあることを確認します (pano) -poses.csv ファイル)。

3. pano フォルダー (パノラマ画像と csv ファイルを含む) を圧縮します。
4. 点群とパノラマ画像が完成したので、それらをクラウド上のプロジェクトに追加できます。点群と zip ファイルをアップロードするだけです。
ファイルをプロジェクトにアップロードする方法については、 ** 「プロジェクトにファイルを追加する」の記事を読んでください。パノラマ画像については「360° 画像を追加する」の記事を読んでください。**
ご質問がある場合、またはさらに詳しい情報が必要な場合は、技術チームにお問い合わせください。