导入带有全景图像的 NavVis 数据集
一般信息
NavVis 提供移动测绘系统,能够以速度和规模生成具有测量级精度的高质量数据。他们有不同的扫描仪类型,可以帮助您快速捕捉环境。
根据您正在使用的 NavVis 扫描仪类型,完成测量后的输出结果可能会略有不同。
NavVis 工具,无论是在命令行上还是通过其界面,都从应存储在初始目录“datasets\_rec”中的数据开始。在此目录下,每个数据集有一个子目录,其名称组成如下:YYYY-MM-DD\_HH.MM.SS。
在这些数据集中,您可以找到来自各种激光雷达的原始数据(低文件无法使用)以及需要组装的广角单元照片。
后处理数据集
1.需要对数据集进行后处理,确定点云输出格式.las或.e57(默认会生成.ply点云。对于云,建议使用.las或.e57,因为.ply用于 3D 模型)。请注意,您可以处理多个数据集或单个数据集。

此 navvis-postprocessing 命令将为每个数据集生成点云以及名为 xxxxx-pano.jpg 的 8192 x 4096 像素的等距柱状全景照片(其中 xxxxx 是 5 位索引,例如第一张图像为 00000-pano.jpg) )以及一个 CSV 文件,指示这些全景图像的中心在相关数据集的局部坐标中的位置(pano-poses.csv 文件)。
请注意,NavVis 数据的输出不能是结构化的 e57,因为 e57 内部没有站点。
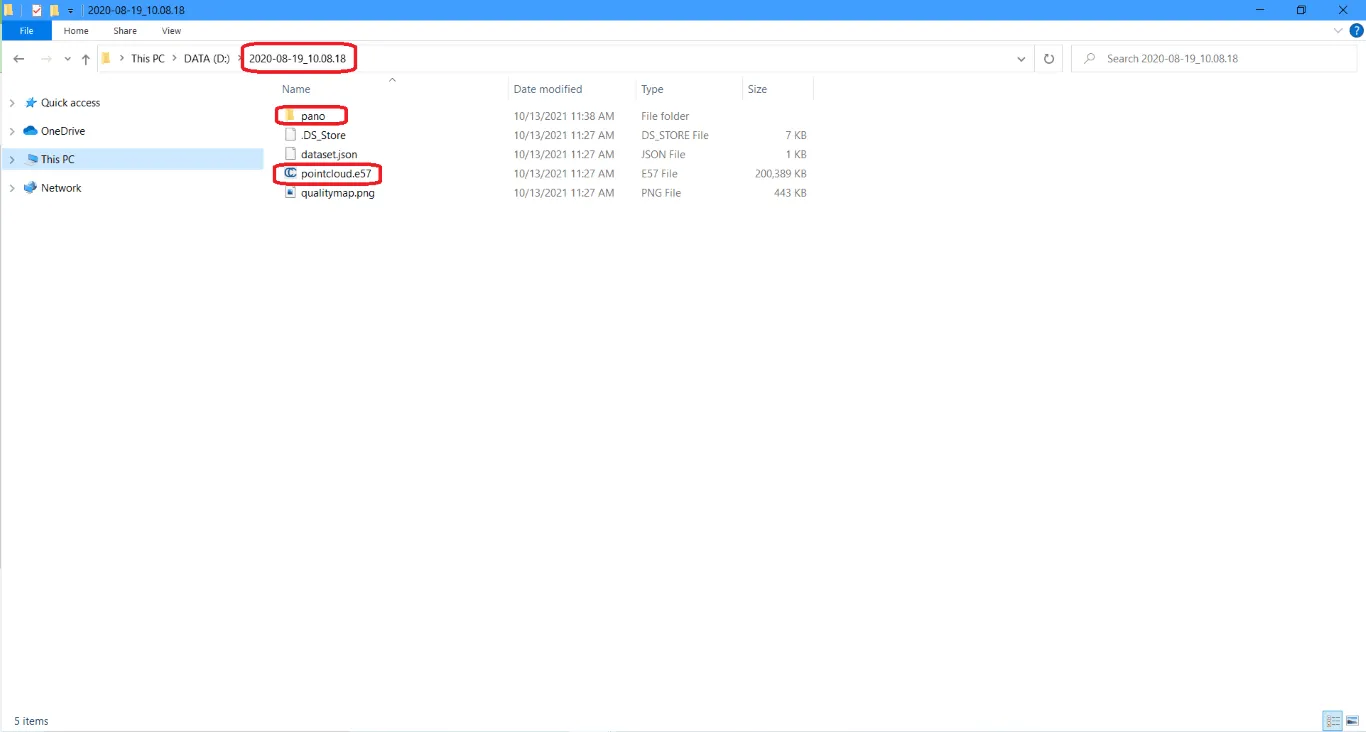
2. 现在您已经有了点云,请验证文件夹“pano”中是否有全景图像和 CSV 文件,该文件指示每个全景图像的中心在相关数据集的局部坐标中的位置 (pano -poses.csv 文件)。

3. 压缩 pano 文件夹(包含全景图像和 csv 文件)
4. 现在您已经有了点云和全景图像,您可以将它们添加到云上的项目中。您只需上传点云和 zip 文件。
要了解如何将文件上传到项目, 请阅读文章**“将文件添加到项目”** ,对于全景图像,请阅读文章**“添加 360° 图像”。**
如果您有任何疑问或需要更多信息,请联系技术团队。