从 Cyclone Register 360 导出结构化 .e57/RCP
Cyclone Register 360 是一款面向 3D 激光扫描专业人员的点云处理和分析软件,提供专门针对点云的自动化工具和工作流程。这使用户能够导入点云数据、处理、分析并快速为客户创建高质量的交付成果。
一般信息
.e57 格式可以存储来自激光扫描仪和其他 3D 成像系统的点云数据,以及 2D �图像和相关的基本元数据。为了更好地了解 e57 格式,请务必阅读文章“了解 E57 文件”。
使用 Cyclone Register 360,您可以导出:
- 结构化的 e57,所有车站均位于内部(推荐用于站台)
- 每个站一个结构化的e57(不推荐用于平台)
- 统一的 e57(不推荐,因为您将失去结构和气泡视图功能)
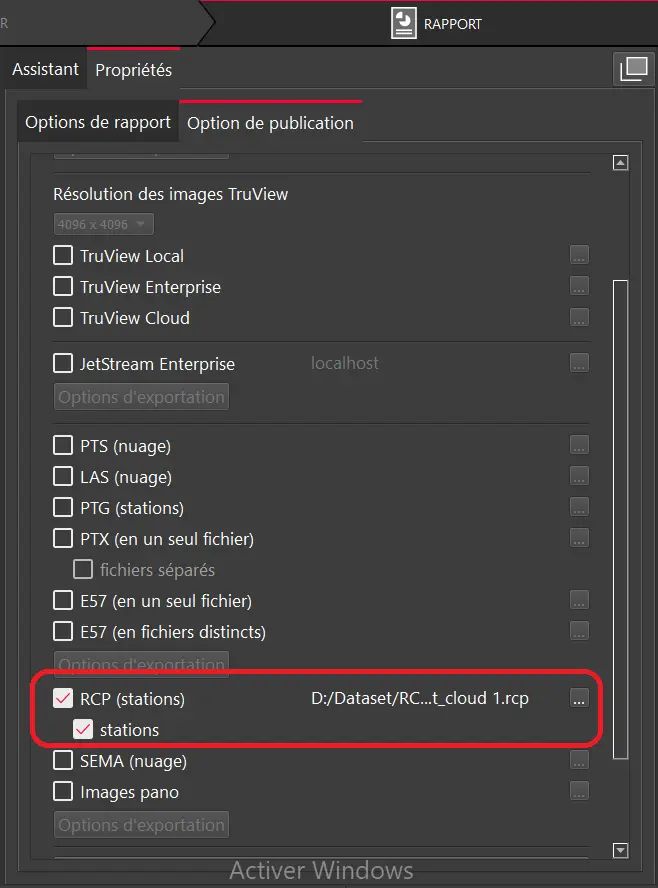
请注意,如果您有 Cyclone REGISTER 360 PLUS 版本 2023.0,则 360 图像在 E57 中的保存方式不同。如果您遇到这种情况,我们建议您更新版本或导出结构化 RECAP 项目:
 有关如何上传 RECAP 项目的更多信息,您可以点击此链接:导入 RECAP 项目。
有关如何上传 RECAP 项目的更多信息,您可以点击此链接:导入 RECAP 项目。
在本文中,我们将讨论如何导出包含所有电台的结构化 e57。
使用 Cyclone Register 360 导出结构化 .e57:
- 处理和注册过程完成后,使用窗口右上角的工具栏图标打开“报告”。

2. 接下来,从“发布选项”中单击导出选项并选中“单独配置(结构化、非结构化)”。

3. 配置导出选项后,选中“E57(在单个文件中)”。将打开一个新窗口,您可以在其中选择导出位置。

4.(可选)您还可以根据您的喜好通过单击“抽取站/点云”来抽取点云。

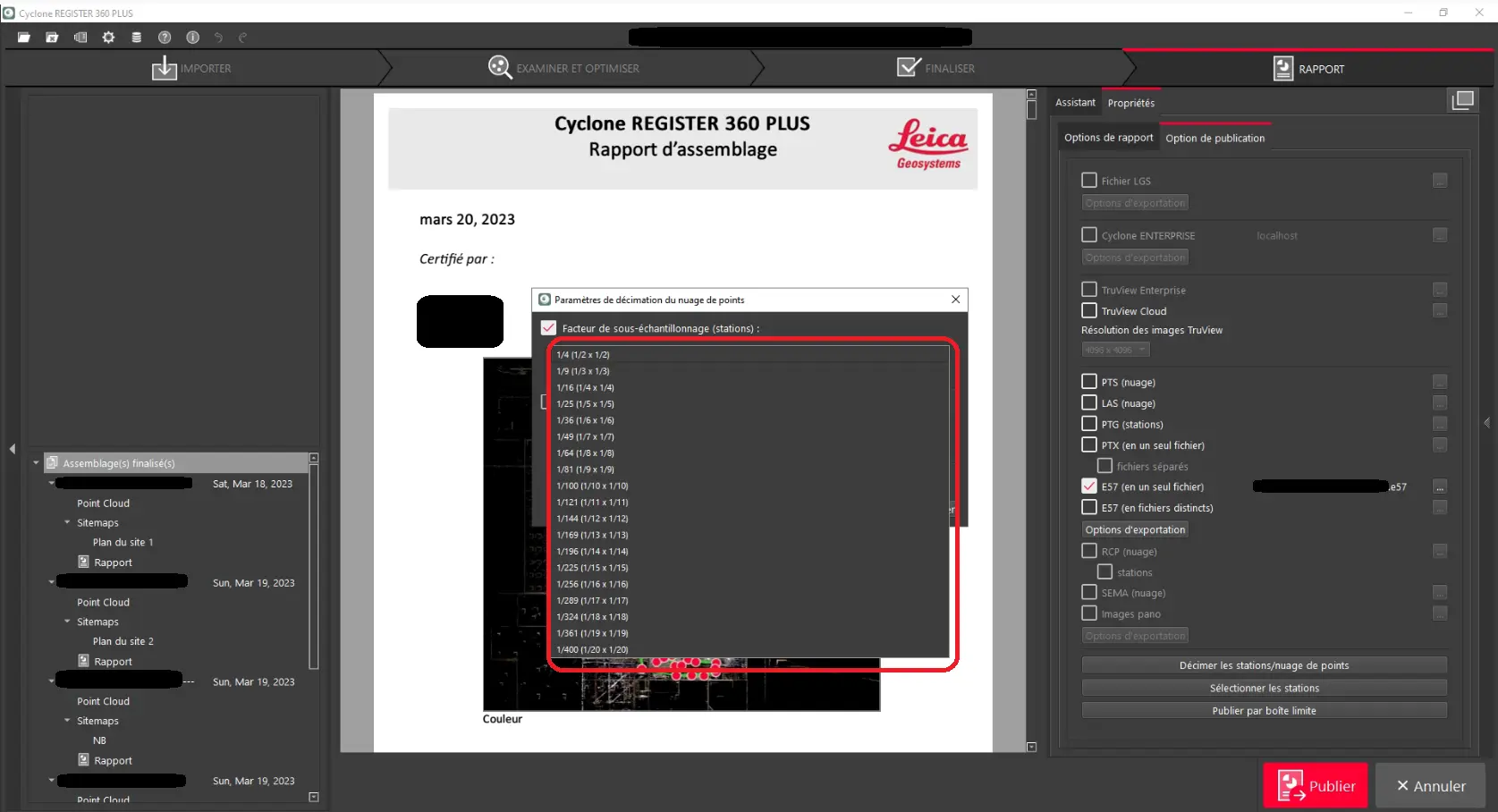
此过程可能需要一些时间,具体取决于点云和站点的数量。
此过程完成后,您可以通过我们的平台共享 e57 文件,将其作为源添加到项目中。
要了解如何将文件上传到项目,请阅读文章“将文件添加到项目”。
\*请注意,对于 Register 360,e57 将在内部存储 360° 图像。当你将项目上传到平台时,你就可以下载它们。”
如果您有任何疑问或需要更多信息,请联系技术团队。