插件 Autodesk REVIT
在本文中,您将找到5 个类别:
- 插件要求
- 安装REVIT插件
- 在 REVIT 中插入点云
- 点云管理
- 在 REVIT 中插入项目的源
- 点云气泡(360 图像)的管理。
1. 插件要求
最低配置:
处理器:双核 2 GHz 或更高
RAM:至少 8 GB 或以上
显卡:Nvidia Quadro 或 GeForce 1 GB + OpenGL 4.5 或更高版本(必须安装最新驱动程序)
硬盘:1 GB 或更多可用存储空间
推荐配置:
处理器:Intel® i 系列、Xeon®、AMD® Ryzen、Ryzen Threadripper PRO。 2.5 GHz 或更高
RAM:至少 16 GB 或以上
显卡:Nvidia Quadro 或 GeForce 1 GB + OpenGL 4.5 或更高版本(必须安装最新驱动程序)
硬盘:5 GB 或更多可用存储空间
2.安装REVIT插件
收到安装程序后,打开它(双击文件)将显示以下界面:

在此窗口中,选择要安装插件的 Revit 版本(2022 或 2023)。在下图的选择矩形(红色矩形)中单击所需的版本:

选择版本后,点击界面右下角的“下一步”。然后界面将更改为显示以下照片:

您可以随时单击“上一步”返回到之前的选择,或者单击“取消”取消当前下载,要继续安装,请单击“安装” 。

有关取消下载的更多信息,请参阅“取消正在进行的下载”部分。如果安装过程中发生冲突,请参见“运行 Revit 冲突”。
下载将自动开始,您将到达此界面:

恭喜!您已完成 Revit 插件的安装。单击界面右下角的“完成”按钮(蓝色框)以完成该过程。
取消当前下载:
如果您点击每个安装界面右下角的“取消”按钮,您将看到以下界面:

您有两个选择:单击“是”取消 Revit 插件的安装,或单击“否”返回上一界面。

冲突,Revit正在运行:
如果安装过程中出现冲突,您会看到如下界面:

在这种情况下,您可以选择通过自动关闭 Revit 应用程序来继续下载。请注意,当前在 Revit 中打开的所有项目都不会保存并且会丢失。在继续之前请确保您已保存您的工作。您还可以选择继续安装而不关闭冲突的应用程序。但是,这将导致安装失败并显示以下消息:

最后,您可以点击“取消”来取消安装。有关取消的更多信息,请参阅“取消当前下载”部分。您还可以单击“下一步”,默认情况下,这将执行与通过关闭 Revit 应用程序继续安装相同的操作。
3.在REVIT中插入点云
如果您的计算机上没有安装Revit插件,您可以先进入“Revit插件安装”类别,完成此操作后返回到该类别。
请注意,使用这些插件,您可以为平台上的任何点云提供服务。首先,通过单击项目图像从主菜单打开项目。如果没有可用的项目,请转到“创建项目”一文。
打开项目后,打开导出菜单并选择流式传输。

我们现在可以进入广播窗口,选择要广播的点云以及Autodesk Revit软件。
点击“生成”即可获取广播代码。

要复制代码,请单击复制按钮。

然后使用之前添��加的插件打开 Autodesk REVIT。如果尚未添加,请转到“ Revit插件安装”类别。
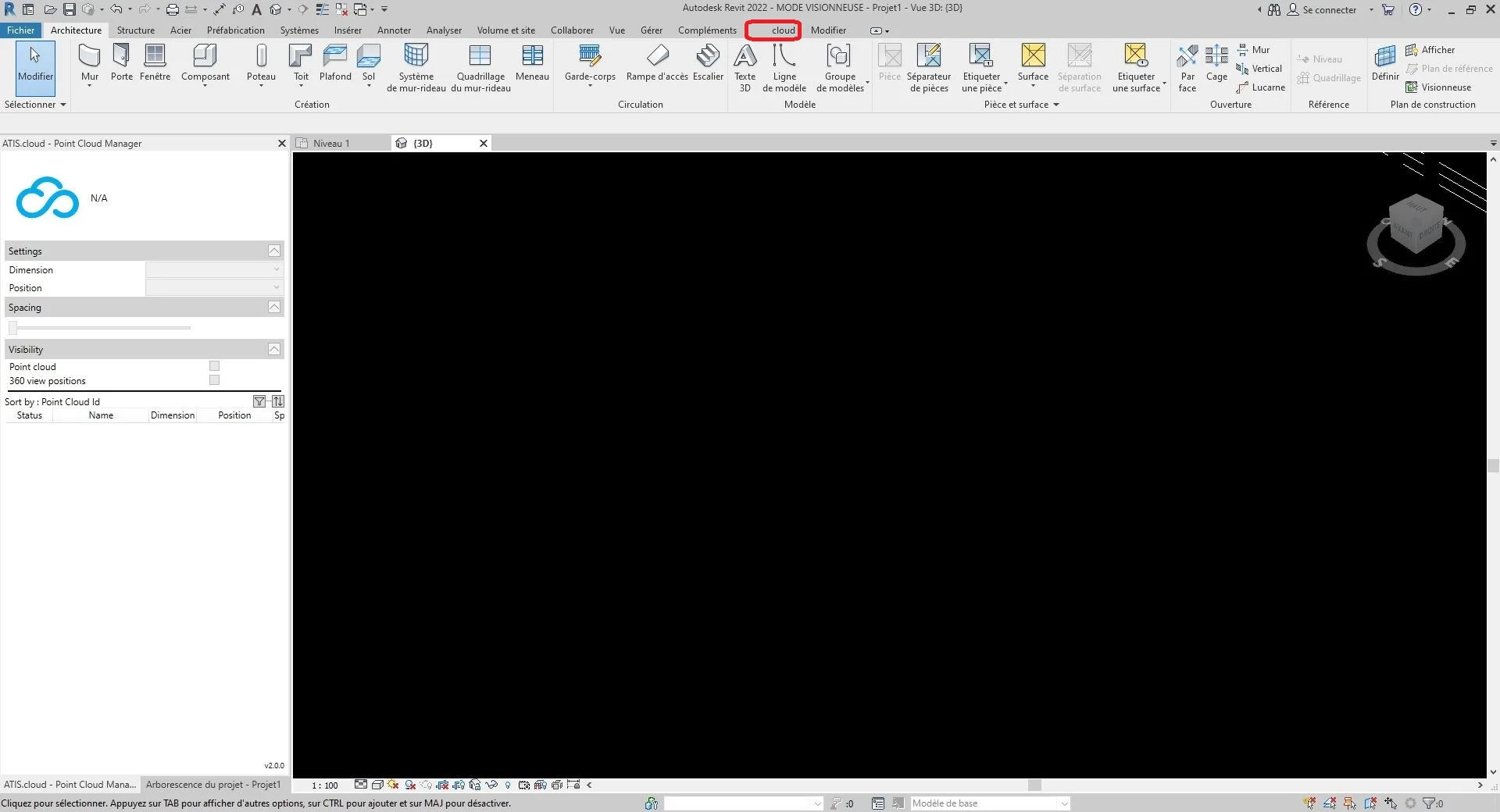
在 Revit 项目中,单击顶部工具栏中的“云” 。
 单击屏幕顶部工具栏中“添加点云”类别中的“云流光” 。
单击屏幕顶部工具栏中“添加点云”类别中的“云流光” 。
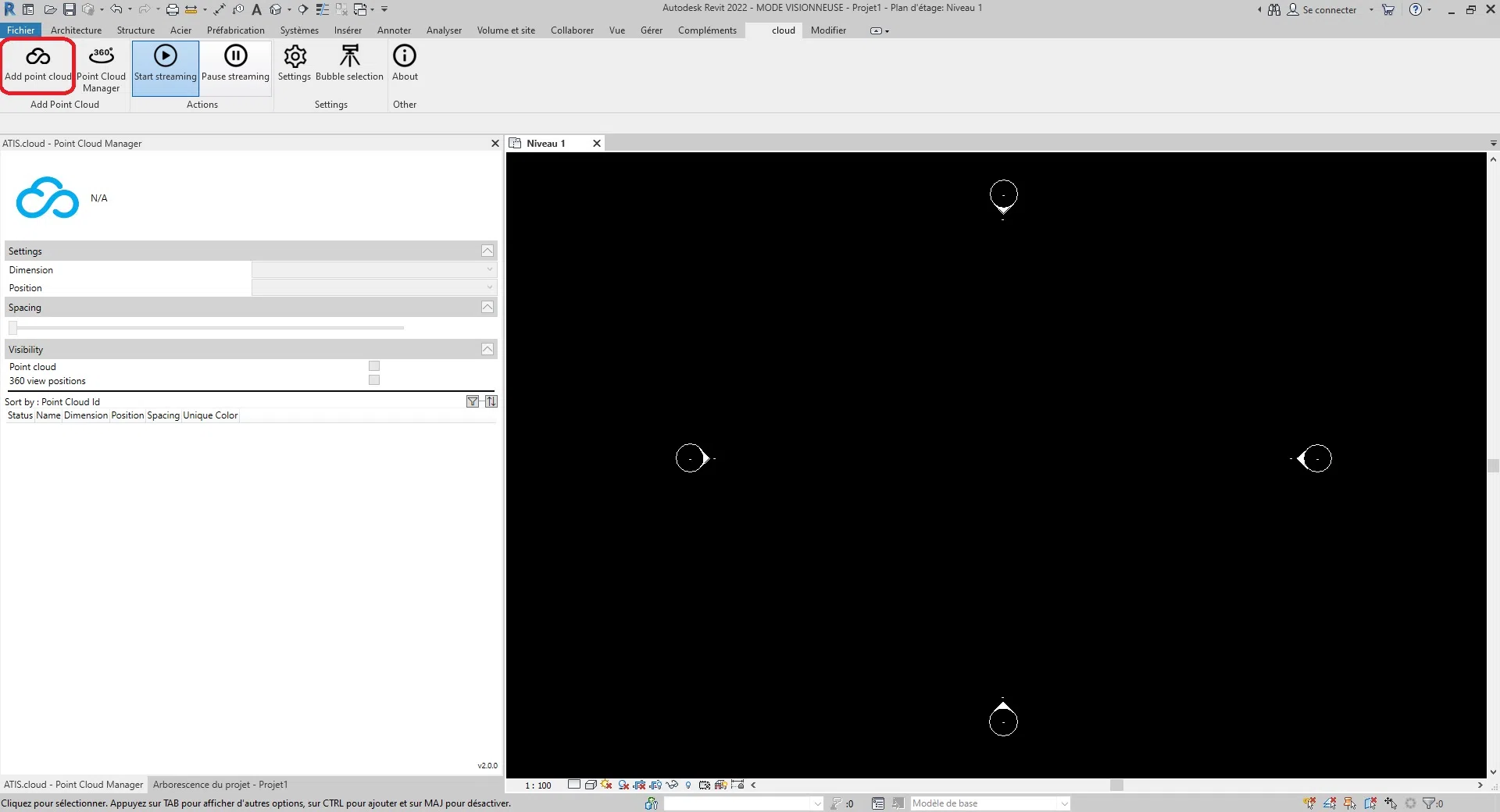 执行此操作后,屏幕上会出现一个对话框,单击垃圾桶按钮右侧的记事本图标。
执行此操作后,屏幕上会出现一个对话框,单击垃圾桶按钮右侧的记事本图标。
有关信息,从名为“streaming code”的站点生成的代码对应于 Revit 上的“访问代码”字段。此外,您可以随时通过单击垃圾桶标志的删除按钮来删除此字段。

然后您可以配置点云的尺寸。尺寸是其显示的类型。
有关信息,即使在添加后,通过“点云管理器”也可以修改所有点云设置。
目前有五种兼容的尺寸类型。
- Colors :用于表示点云中每个点的颜色。红色、绿色和蓝色通道用于表示点的颜色,而 Alpha 通道用于表示点的透明度或不透明度。在激光雷达点云中使用颜色可用于可视化和解释目的,因为它可以提供有关由点表示的对象和表面的属性的附加信息。例如,在植被绘图中,点的颜色可用于区分不同类型的植被或识别植被密度高或低的区域。
- 强度:它表示捕获点时传感器或设备接收到的信号的强度或幅度。在某些情况下,强度与物体在该点的反射率有关。例如,在 LiDAR 点云中,强度值表示物体反射回传感器的激光量。在这种情况下,较高的强度值表示反射更多光的表面,例如白墙,而较低的强度值表示反射较少光的表面,例如黑色汽车。在其他情况下,强度可能代表不同的物理量。例如,在摄影点云中,强度可以表示用于生成点云的原始图像中像素的亮度。
- 分类:仅适用于兼容的点云。分类的目的是将相似的点分为有意义的类别,例如土壤、植被、建筑物和其他物体。
- 高度:表示每个点的高度或垂直位置。高程数据在许多点云应用中非常重要,例如地形测绘、洪水建模、城市规划和基础设施设计。
- 点源 ID :这标识生成该点的特定激光传感器。 LiDAR 系统中的每个激光传感器都有一个唯一的标识符或编号,该信息记录在点云数据中,以便进行分析和质量控制。点源识别在使用多个 LiDAR 传感器捕获单个场景或区域的情况下特别有用。通过识别哪个传感器生成每个点,可以对数据进行质量检查并确保数据在不同传感器之间正确对齐和注册。这在林业等应用中尤其重要,其中可以使用多个激光雷达传感器从不同角度和视角捕获数据。在我们的平台上,点源 id 用于存储源分析 id,使用户可以轻松跟踪点云中每个点源自哪个分析。例如,如果使用 3D 激光扫描仪对同一区域执行多次扫描,则可以为每次扫描分配唯一的扫描 ID,并且可以将浊点中每个点的点源 ID 属性设置为相应的扫描 ID。
要选择所需的尺寸,请单击文本“尺寸”右侧的选择矩形。

点击“加载点云” ,初始化点云数据。

根据您的喜好更改 Revit 中的插入设置。您可以使用“间距”滑块调整点之间的间距,并通过选择以下三个选项之一来选择点云在项目中的位置:“中心到中心”、“内部原点”或“在共享站点”。
- 中心到中心:此选项使用视口中心作为参考点来放置点云。
- 内部原点:此选项使用云的内部原点作为参考点来定位点云。内部原点通常由点云本身的坐标系定义。使用此选项,点云将根据其内部原点而不是 Revit 项目的原点进行定位。当您需要将点云与其自己的内部坐标系对齐时,这非常有用。
- 在共享站点:此选项将点云放置在共享站点的位置。共享站点是指多个项目可以基于的公共地理位置。使用此选项,点云将根据共享站点的坐标进行定位。当处理基于公共站点的项目并希望将点云与该共享位置对齐时,这非常有用。
- 自动 - 原点到上次放置:Revit 将下一个导入的点云与之前导入的点云保持一致。插入第一个点云后,此选项将被激活。例如,您可以移动第一朵云,以便将其与模型的元素正确对齐。如果您在与第一个点云相同的站点和相同的坐标系中创建了其他点云,建议使用此选项插入其他点云。然后,新的点云将相对于第一个点云正确定位。
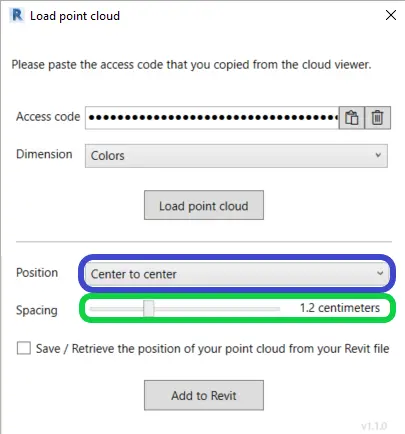
配置完成后,单击“添加到Revit”将点��云插入到Revit中。

在工具栏中的“操作”类别中,有两个按钮可让您启动点流或停止点流。
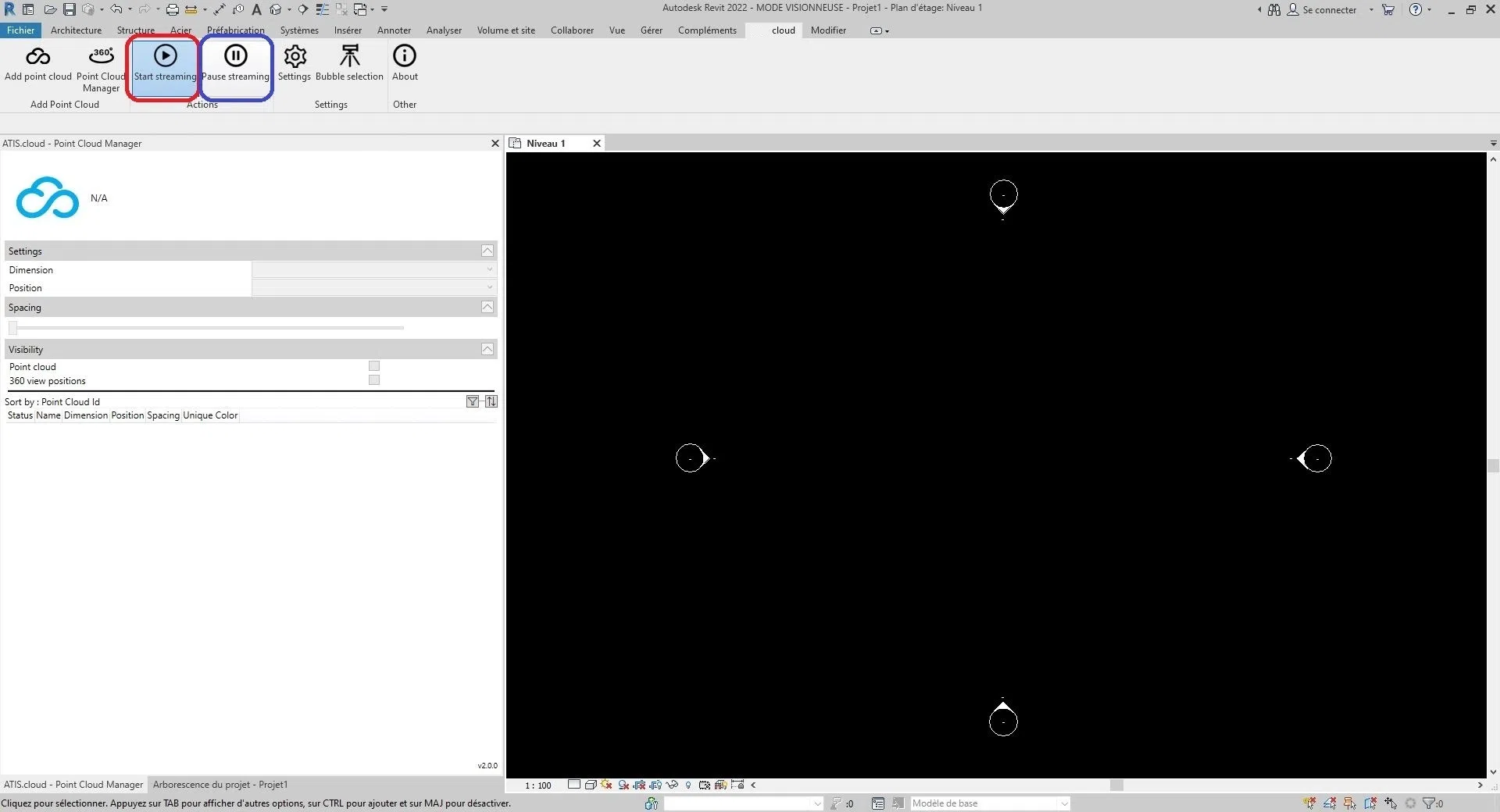 点流是一种允许点按照一定的组织从云端一点点到达的功能。然而,此操作需要永久的互联网连接,并且需要主机的某些资源。
点流是一种允许点按照一定的组织从云端一点点到达的功能。然而,此操作需要永久的互联网连接,并且需要主机的某些资源。
这就是为什么您可以通过单击“停止流式传输”来停止或通过单击“开始流式传输”来重新启动点流式传输。
清理存储空间:如果您的计算机磁盘空间已满,该插件可能会遇到操作问题。这就是为什么,在“设置”类别下“云”菜单栏中的“设置”按钮中,您可以清除为 Revit 插件保留的存储空间。首先,点击“设置”
![]() 有关信息,云会在视觉上从 Revit 中消失,这是正常的,当您开始点流时,点云将重新出现(转到“停止”或“开始点流”部分以开始点流)。
有关信息,云会在视觉上从 Revit 中消失,这是正常的,当您开始点流时,点云将重新出现(转到“停止”或“开始点流”部分以开始点流)。
恭喜!您现在已将流数据中的点云插入到 Revit 中。
有关管理点云设置的更多信息,请参阅“点云管理器”类别。
在此窗口中,您还可以指定插件要使用的 GPU 内存的最大值以及不超过的磁盘空间的最大值。要了解有关在 Revit 中添加 Web 项目源的更多信息,请参阅“添加源”类别。
4.点云管理
如果您的计算机上没有安装Revit插件,您可以先进入“ Revit插件安装”类别,执行完此操作后返回到该类别。
- 提示:要完全遵循本文中的说明,我们建议您首先添加点云。如果未完成此操作,请转到“在 Revit 中插入点云”类别
“点云管理器”是一个图形界面,允许从网站修改 Revit 项目的每个点云的参数。该窗口允许移动、调整界面大小以及将其锚定到 Revit 屏幕的一侧。
首先,单击“点云管理器”窗口中的点云。如果未显示该界面,请单击“云”工具栏“添加点云”类别中的“点云管理器”按钮。
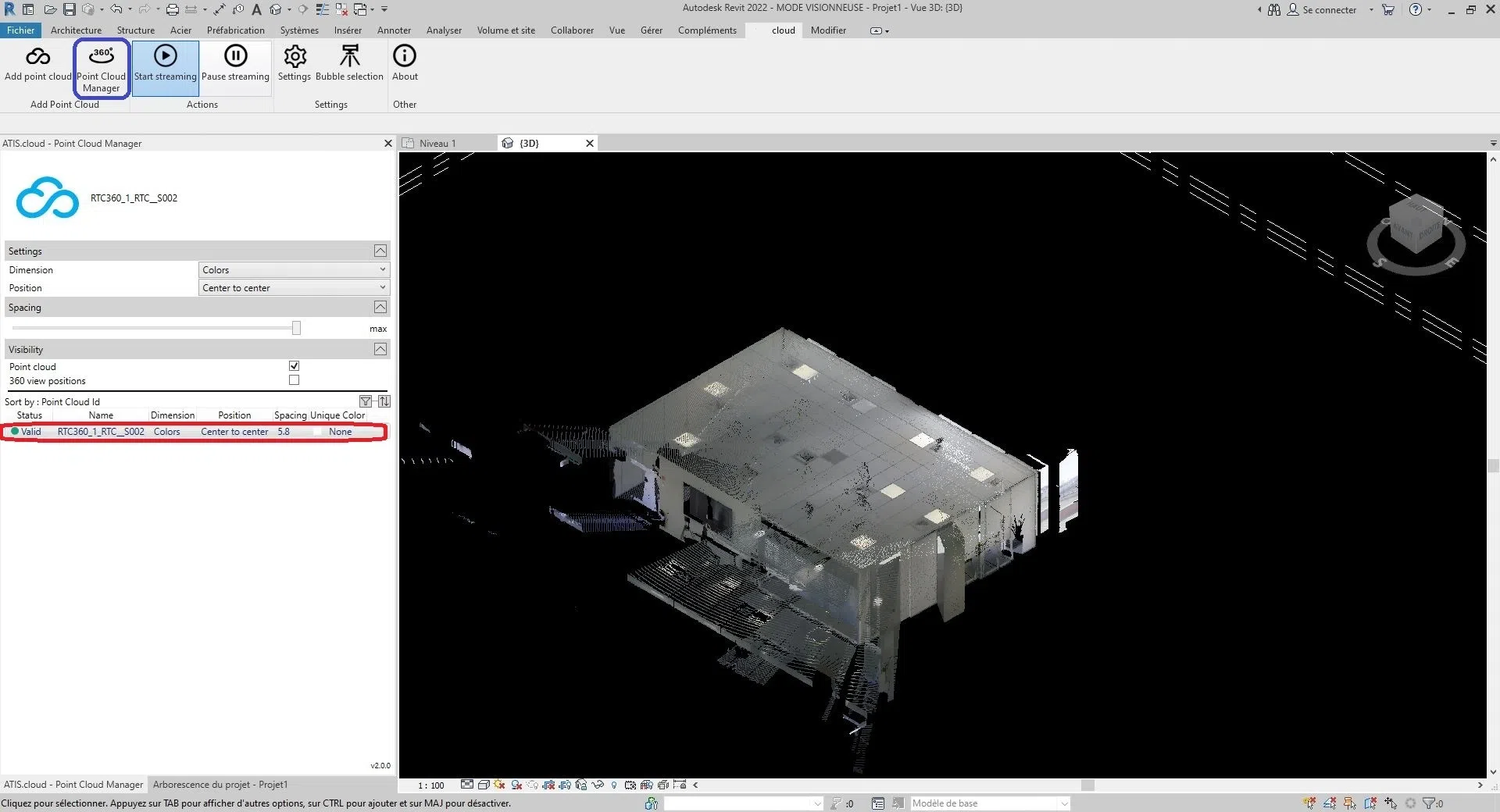 出现了“点云管理器”界面的一部分。界面拆分如下:
出现了“点云管理器”界面的一部分。界面拆分如下:
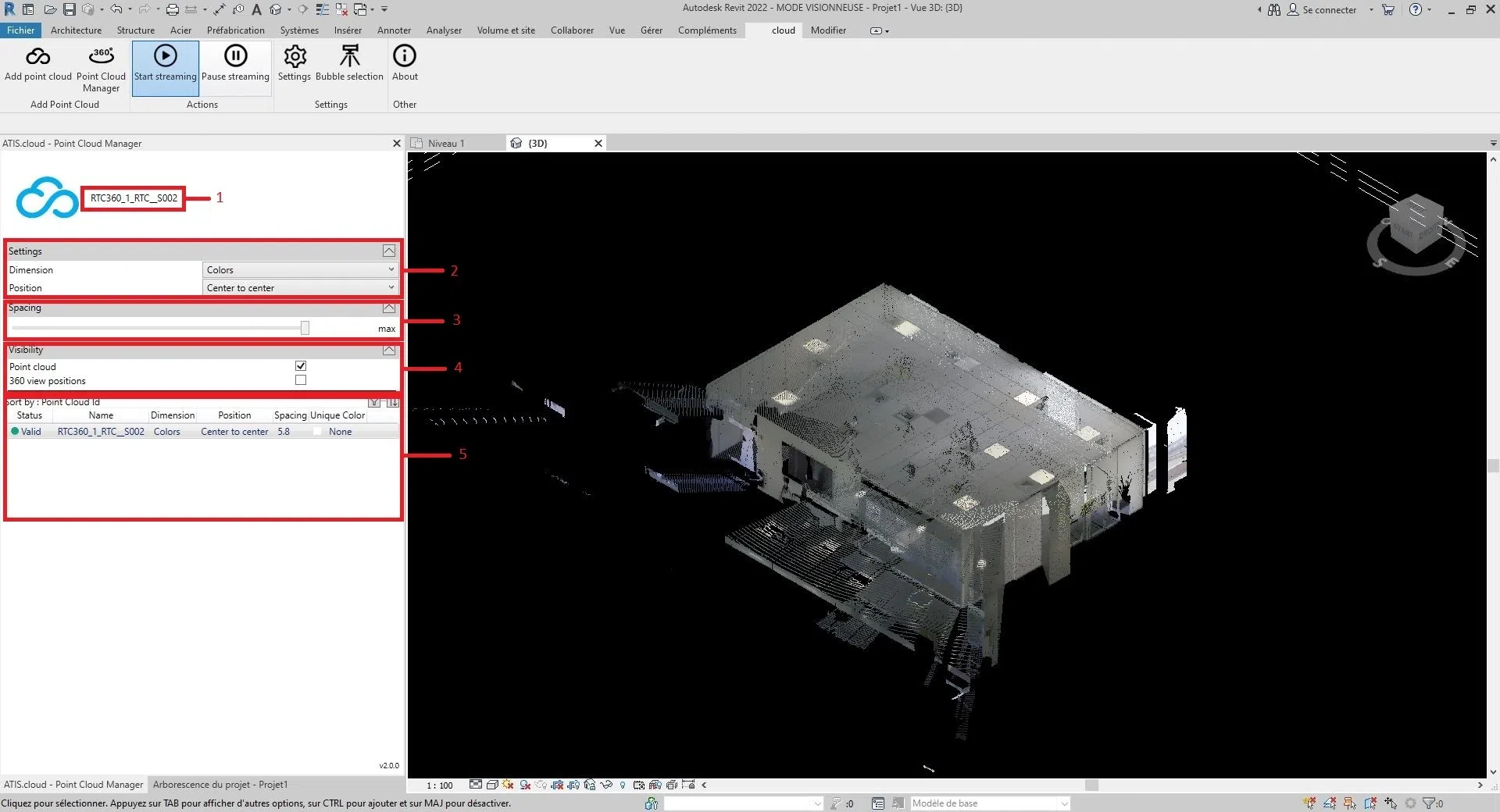
1:选择的云名称,显示的名称与web项目的名称相同
2:云的特征,例如云的尺寸和位置
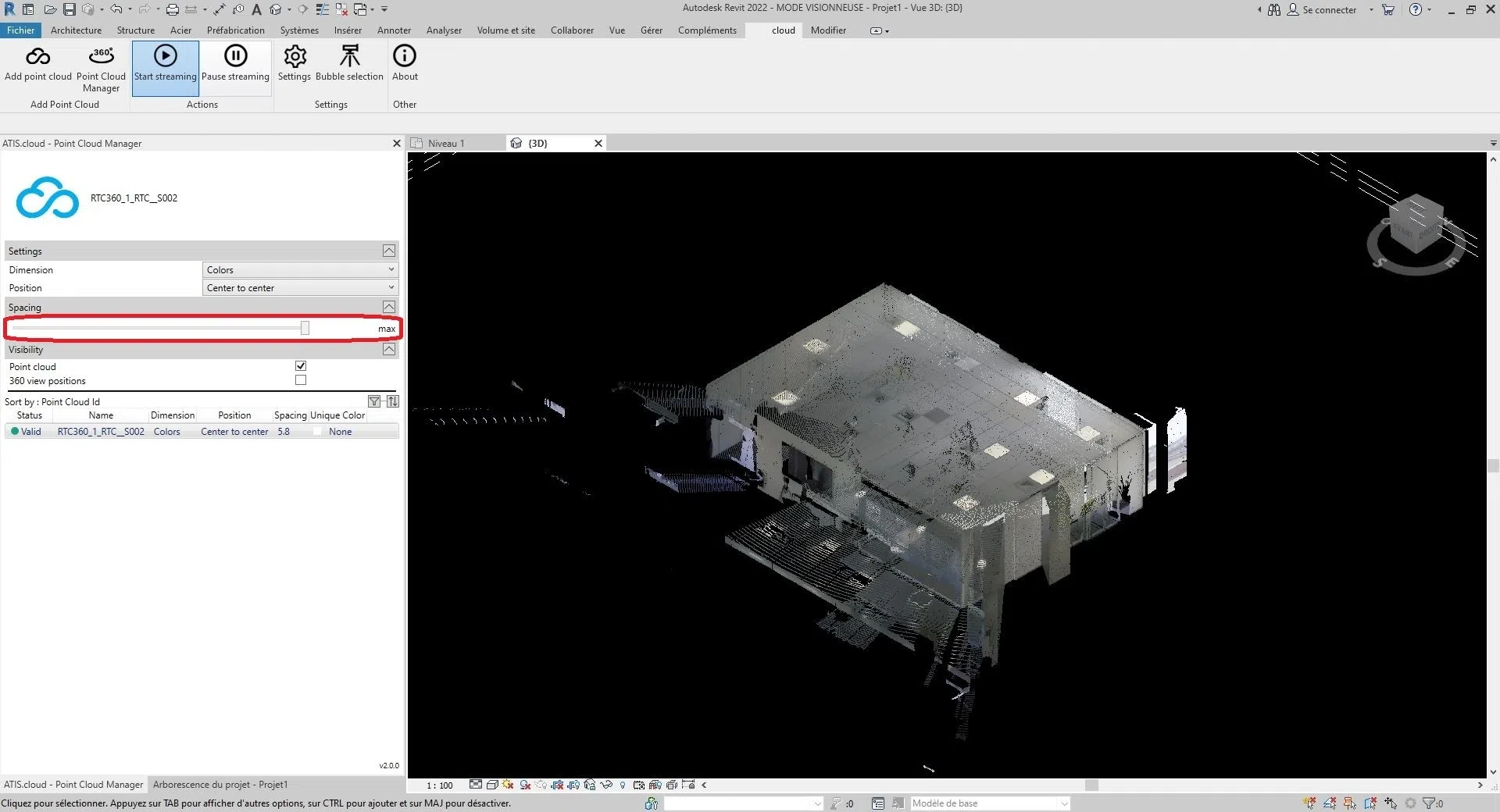
3:云中各点的间距
4:点云和扫描仪可见性参数(有关扫描仪的更多信息,请参阅文章“扫描仪Revit”)
5:所有的云朵都是通过Revit插件插入的,可以一目了然地看到每个云朵的主要参数并进行排序。
- 诡计 :
- 您可以使用每个部分右侧的箭头按钮折叠和展开部分;
- 您可以通过按住鼠标并将鼠标移动到位于“可见性”部分和第 6 部分之间��的黑条上来调整第 6 部分和其余部分之间的大小。
您现在可以修改每个点云的每个参数。
- 云的维度,转到“更改维度”部分;
- 云的位置,进入“编辑位置”部分;
- 云点之间的距离,进入“修改间距”部分;
- 云或扫描仪的可见性,请转到“更改可见性”部分。
要修改所选尺寸,请单击“尺寸”右侧的选择框。
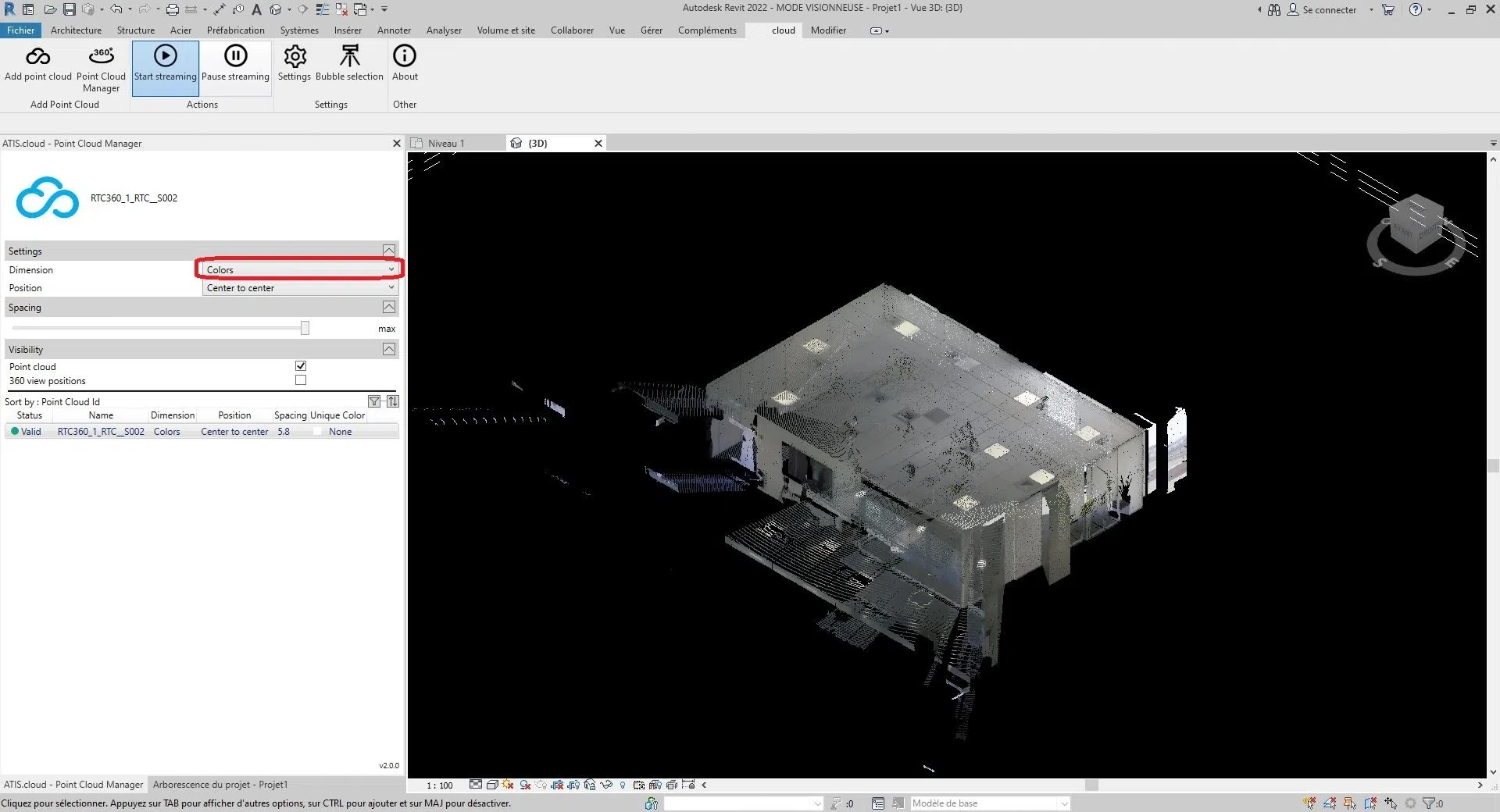 有六种尺寸可供选择:
有六种尺寸可供选择:
颜色、强度、分类、高度、点源 ID 和唯一颜色。
- Colors :用于表示点云中每个点的颜色。红色、绿色和蓝色通道用于表示点的颜色,而 Alpha 通道用于表示点的透明度或不透明度。在激光雷达点云中使用颜色可用于可视化和解释目的,因为它可以提供有关由点表示的对象和表面的属性的附加信息。例如,在植被绘图中,点的颜色可用于区分不同类型的植被或识别植被密度高或低的区域。
- 强度:它表示捕获点时传感器或设备接收到的信号的强度或幅度。在某些情况下,强度与物体在该点的反射率有关。例如,在 LiDAR 点云中,强度值表示物体反射回传感器的激光量。在这种情况下,较高的强度值表示反射更多光的表面,例如白墙,而较低的强度值表示反射较少光的表面,例如黑色汽车。在其他情况下,强度可能代表不同的物理量。例如,在摄影点云中,强度可以表示用于生成点云的原始图像中像素的亮度。
- 分类:仅适用于兼容的点云。分类的目的是将相似的点分为有意义的类别,例如土壤、植被、��建筑物和其他物体。
- 高度:表示每个点的高度或垂直位置。高程数据在许多点云应用中非常重要,例如地形测绘、洪水建模、城市规划和基础设施设计。通过分析高程数据,可以创建准确且详细的数字高程模型 (DEM),可用于广泛的地理空间分析和可视化目的。
- 点源 ID :这标识生成该点的特定激光传感器。 LiDAR 系统中的每个激光传感器都有一个唯一的标识符或编号,该信息记录在点云数据中,以便进行分析和质量控制。点源识别在使用多个 LiDAR 传感器捕获单个场景或区域的情况下特别有用。通过识别哪个传感器生成每个点,可以对数据进行质量检查并确保数据在不同传感器之间正确对齐和注册。这在林业等应用中尤其重要,其中可以使用多个激光雷达传感器从不同角度和视角捕获数据。在我们的平台上,点源 id 用于存储源分析 id,使用户可以轻松跟踪点云中每个点源自哪个分析。例如,如果使用 3D 激光扫描仪对同一区域执行多次扫描,则可以为每次扫描分配唯一的扫描 ID,并且可以将浊点中每个点的点源 ID 属性设置为相应的扫描 ID。
- 独特颜色: “独特颜色”维度的目标是能够使用用户定义的独特颜色为点云着色。
要修改所选位置,请单击“位置”右侧的选择框。
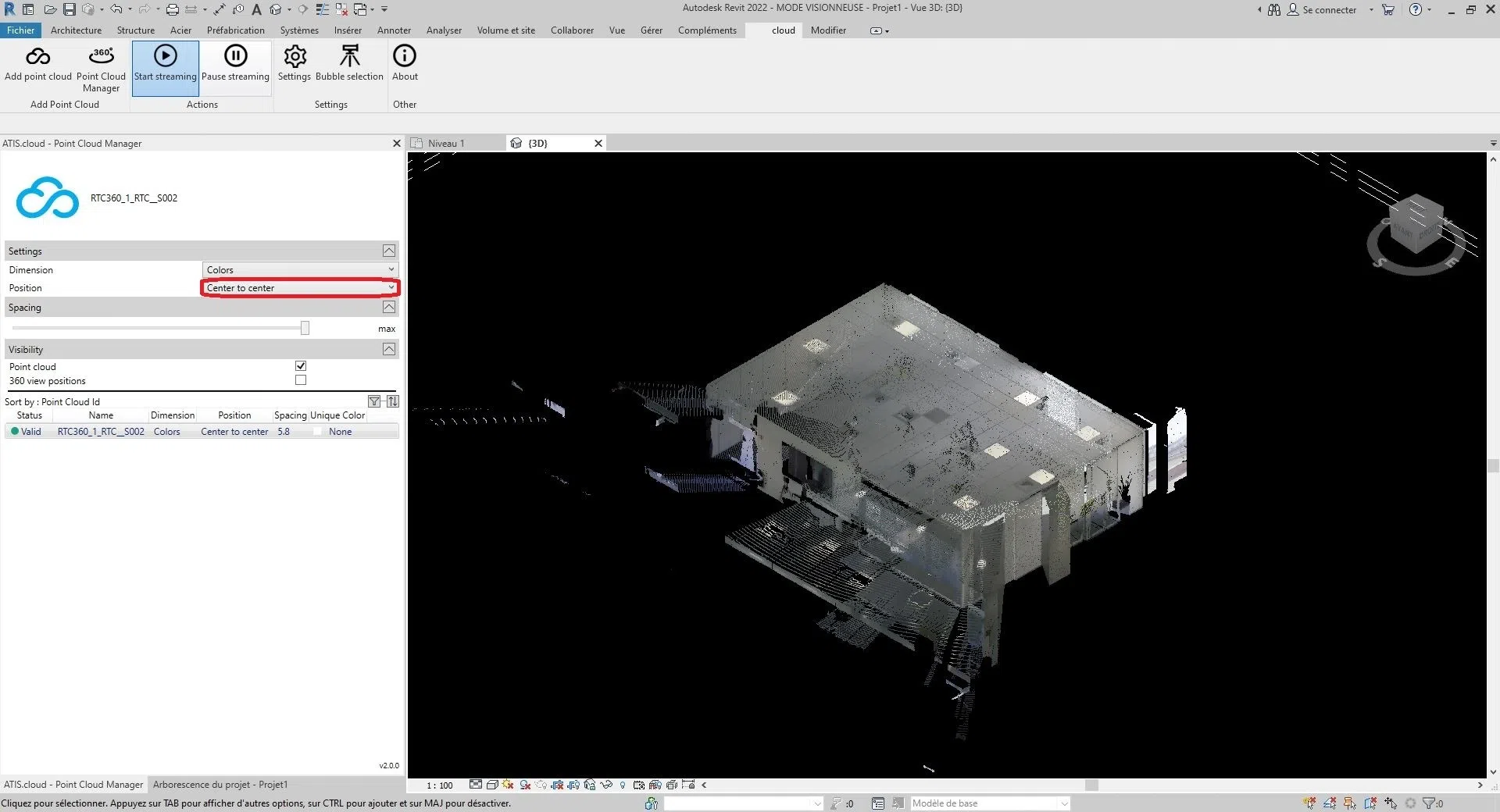 您将可以在以下三个选项之间进行选择:
您将可以在以下三个选项之间进行选择:
“中心到中心”、“内部原点”或“在共享站点”。
- 中心到中心:此选项使用视口中心作为参考点来放置点云。
- 内部原点:此选项使用云的内部原点作为参考点来定位点云。内部原点通常由点云本身的坐标系定义。使用此选项,点云将根据其内部原点而不是 Revit 项目的原点进行定位。当您需要将点云与其自己的内部坐标系对齐时,这非常有用。
- 在共享站点:此选项将点云放置在共享站点的位置。共享站点是指多个项目可以基于的公共地理位置。使用此选项,点云将根据共享站点的坐标进行定位。当处理基于公共站点的项目并希望将点云与该共享位置对齐时,这非常有用。
- 自动 - 原点到上次放置:Revit 将下一个导入的点云与之前导入的点云保持一致。插入第一个点云后,此选项将被激活。例如,您可以移动第一朵云,以便将其与模型的元素正确对齐。如果您在与第一个点云相同的站点和相同的坐标系中创建了其他点云,建议使用此选项插入其他点云。然后,新的点云将相对于第一个点云正确定位。
要修改云点之间的间距,请移动“间距”部分的栏。
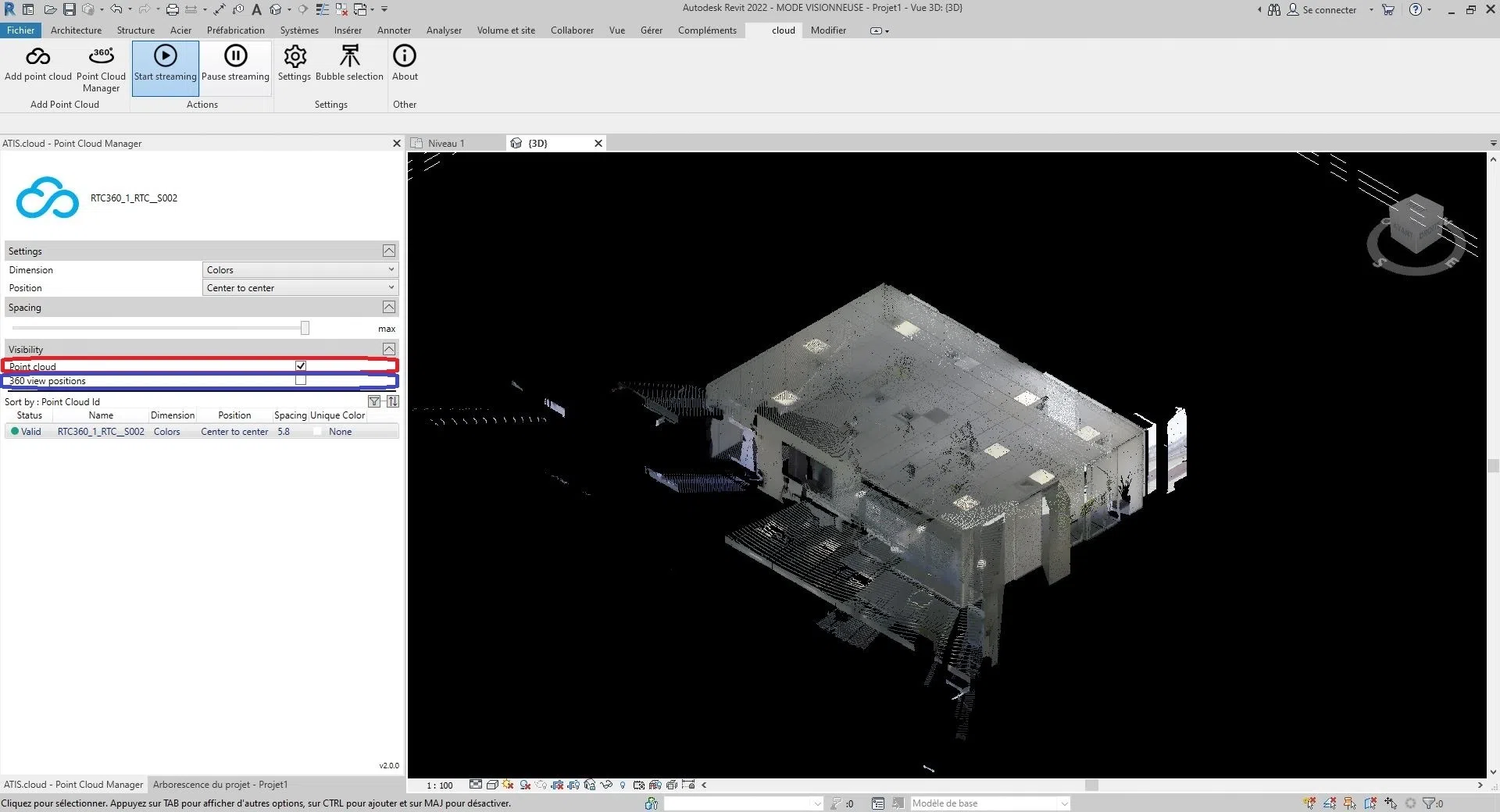
 更改可见性:
更改可见性:
要更改可见性,您有两种选择。或者,您可以通过选中/取消选中“可见性”部分中“点云”右侧的框来显示/隐藏点云。或者,您可以通过选中/取消选中“可见性”部分中“360 度视图”右侧的框来显示/隐藏点云扫描仪。 (项目的不同视图之间的可见性是相同的)
- 尖端:
- 扫描仪信息位于“气泡管理”类别中。
- 要在查看器中放大点云,只需双击相应的云即可。
 恭喜!您了解有关“点云管理器”界面的一切。
恭喜!您了解有关“点云管理器”界面的一切。
要了解有关网站和 Revit 之间交互的更多信息,或者更一般地了解有关扫描仪的信息,请参阅文章“气泡管理”。
5.将项目源插入REVIT
如果您的计算机上没有安装Revit插件,您可以先进入“Revit插件安装”类别,完成此操作后返回到该类别。
要将源添加到项目中,您必须首先添加点云。如果尚未完成,请转到“在 Revit 中插入点云”类别。
一段时间后,添加点云后,将出现一条消息,通知您检测到源。 (时间根据项目上云的数量及其大小而变化)
请注意,此对话框可能隐藏在计算机上打开的选项卡后面。

然后,您可以通过单击“是”来添加项目的所有源,或者通过单击“否”来拒绝添加。
注意,此操作是不可逆的,为了能够重新插入源,需要删除源所在项目产生的云,然后按照本文的说明进行操作。

太棒了,您已经插入了 Web 项目的源代码。
有关管理点云设置的更多信息,请参阅“点云管理器”类别。
6.点云气泡(360图像)的管理
如果您的计算机上没有安装Revit插件,您可以先进入“Revit插件安装”类别,完成此操作后返回到该类别。
- 提示:要完全遵循本文中的说明,我们建议您之前按照“点云管理器”类别来显示扫描仪。
Revit 上的扫描仪是与点云同时插入的 3D 对象,不同之处在于它们默认情况下不可见。通过操作,它允许更改网站查看者的相机。它们在网站上用蓝色气泡表示,在 Revit 中用扫描仪表示。


当 Revit 与网站之间连接或断开连接时,Web 查看器右下角的对话框会通知您。
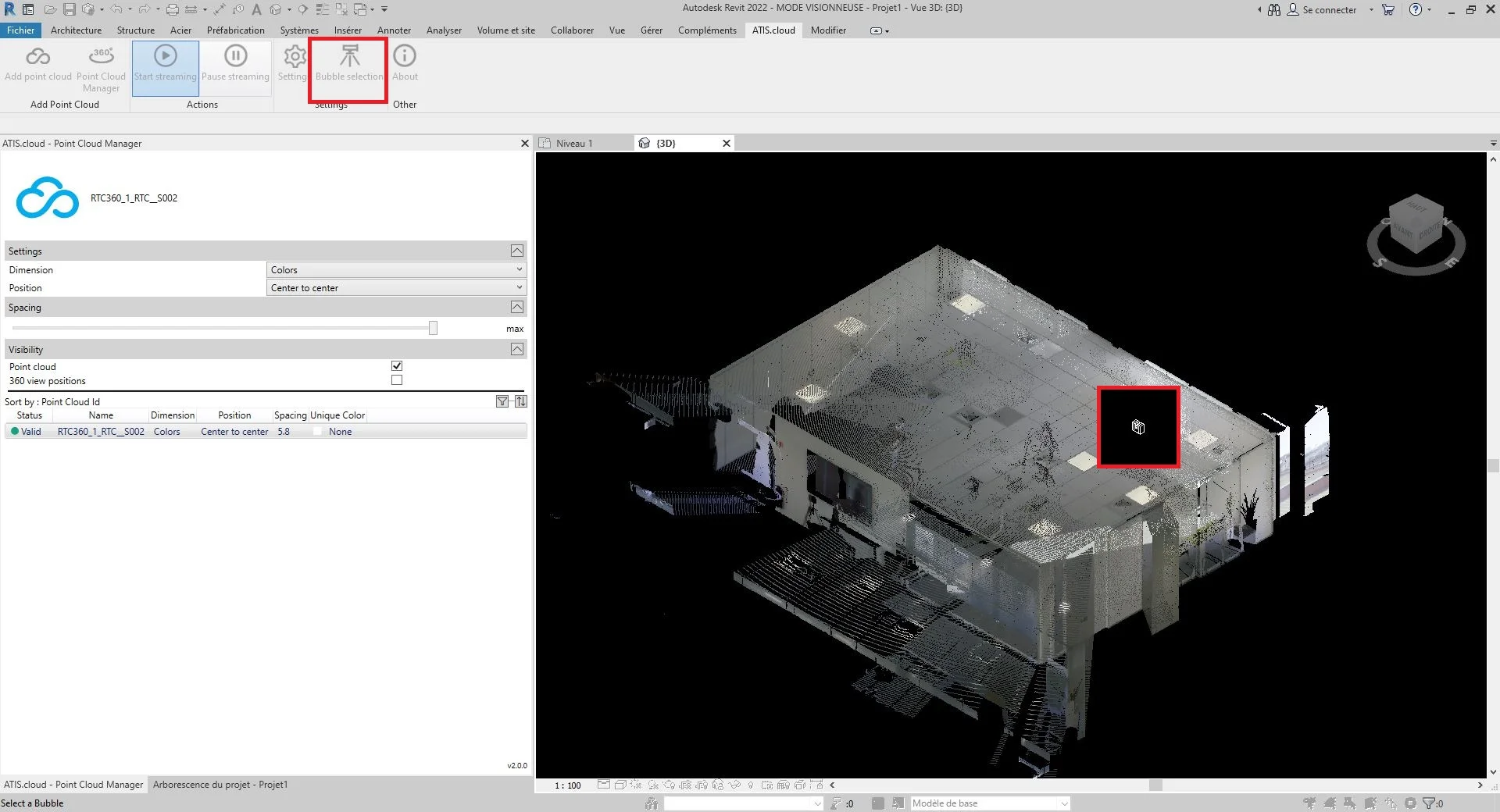
连接建立后,显示点云的扫描仪,然后按《泡泡选择》 。
- 提示:要直接查看扫描仪而不让点云妨碍视线,请取消选中点云的可见性并使扫描仪可见。
如果操作执行正确,鼠标将进入选择模式。
您可以按退出键退出此模式。
单击扫描仪来选择它。
 Web 查看器上的视图已被扫描仪修改,请在 Revit 中选择。
Web 查看器上的视图已被扫描仪修改,请在 Revit 中选择。

- 信息 :
- 如果在使用 Revit 时关闭网页,则会创建一个自动打开项目的 Web 选项卡。
- 建议通过单击左上角的名称返回主页来关闭查看器。如果使用其他方法退出网页,Revit 和 Web 应用程序之间的连接可能会在大约十分钟内无法打开。
恭喜!您知道如何通过 Revit 更改网站上的视角。
7.卸载REVIT插件
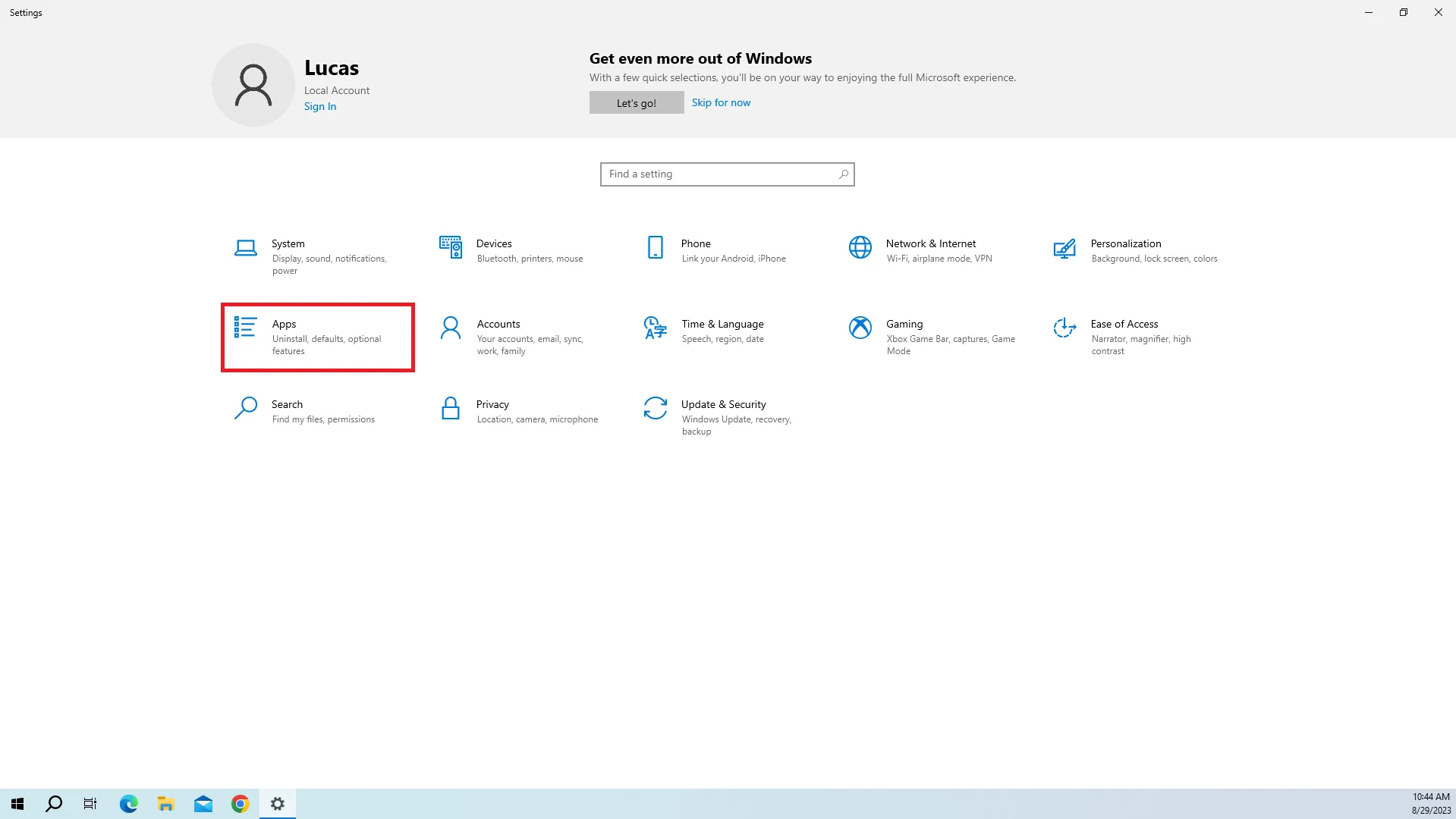
首先打开计算机的设置,您可以在Windows 菜单中找到这些设置。
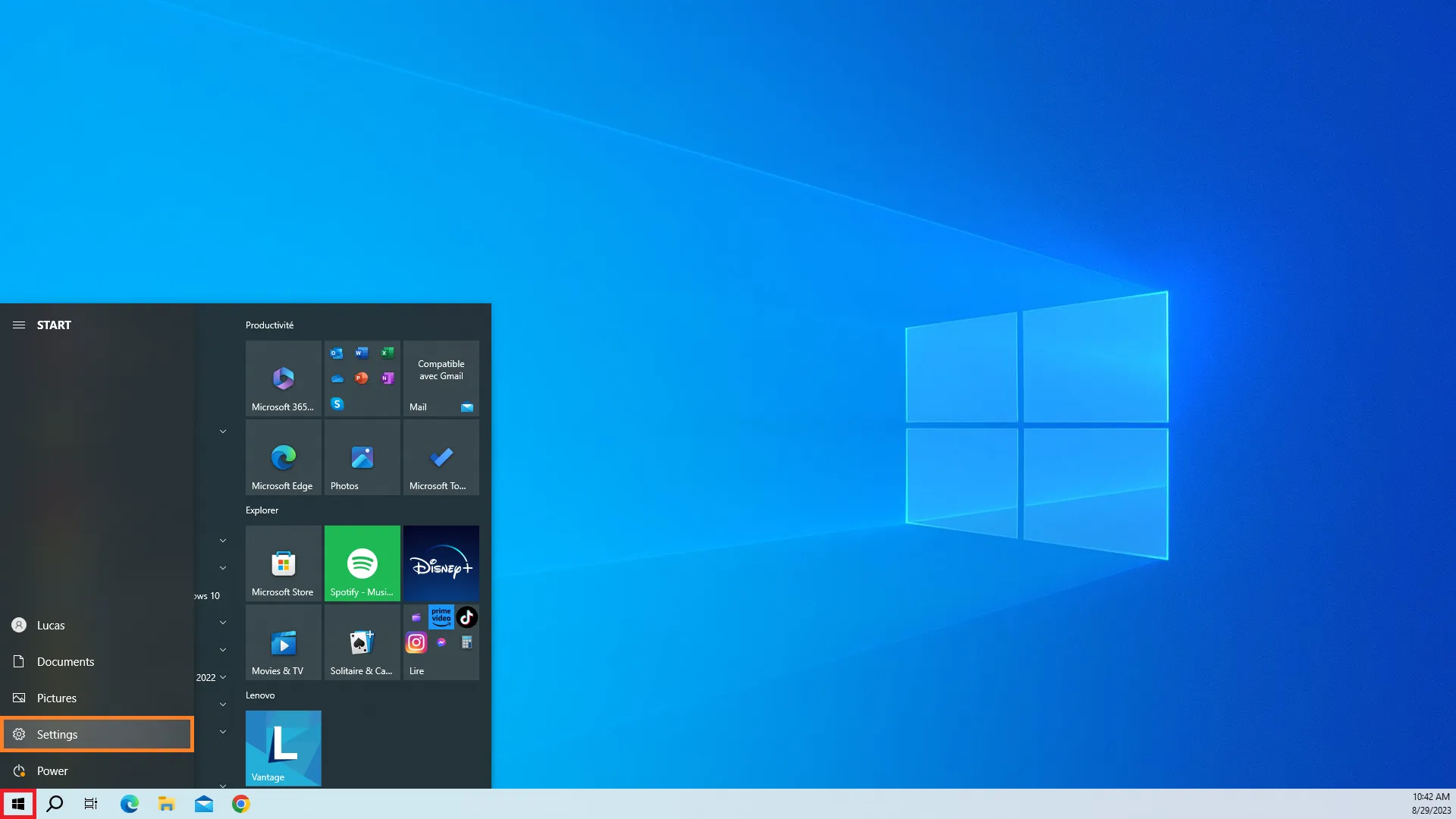
打开您的应用程序设置。
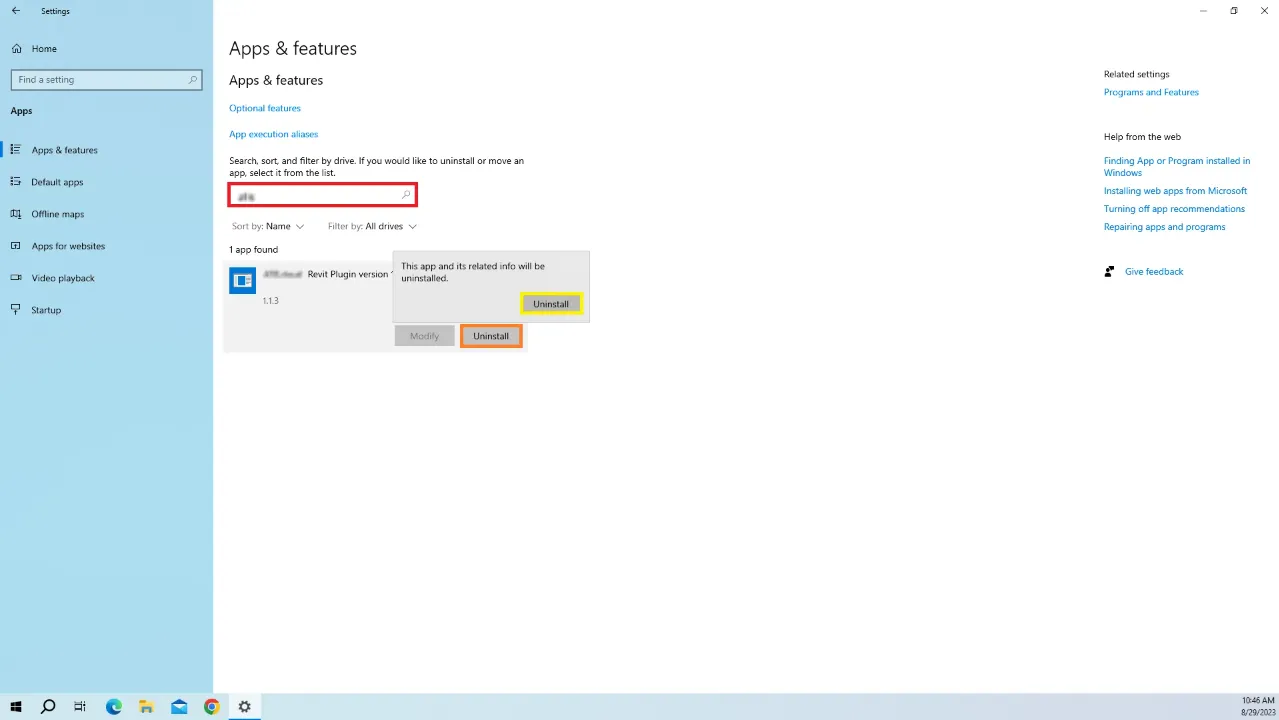
搜索“atis”并点击“卸载” ,会出现弹出窗口,再次点击“卸载”继续。
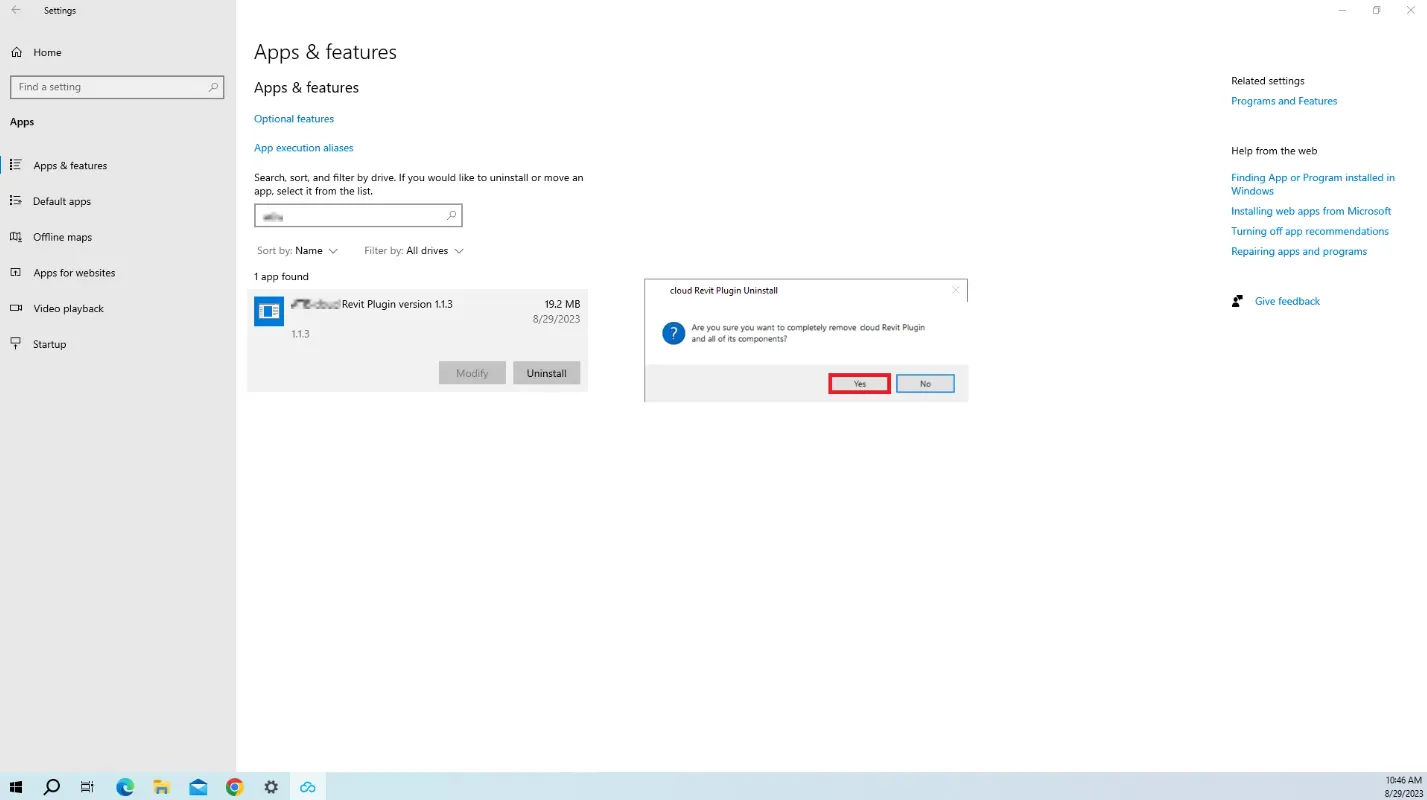
单击“是”确认插件抑制。
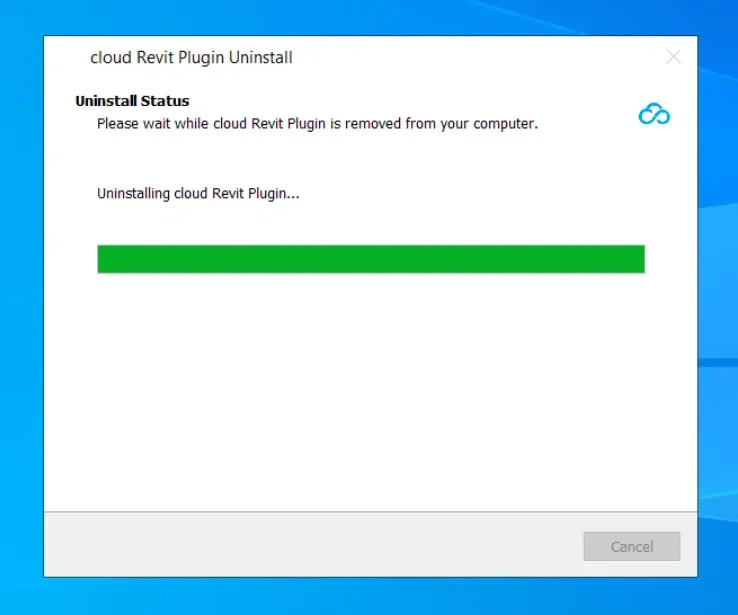
等待该过程完成并单击“确定” 。该插件现已被卸载。您以后随时可以通过再次下载来重新安装它。
如果出现问题或困难,请随时联系平台团队。