导入带全景图像的 HERON 数据集
先决条件
- 需要 Heron Desktop 软件用于处理 HERON 轨迹以及 Reconstructor 软件以便直接导出为与平台兼容的格式
- 需要互联网连接以便上传至平台。
一般信息
HERON 配备有 Reconstructor 软件,用于管理来自多个传感器的 LiDAR 数据。对于 HERON 数据的特定使用,Reconstructor 提供了一个直接导出器,可以将单个非结构化 .e57 文件导出到平台,其中包括处理后的 HERON 点云和 360° 等距矩形全景图像。
在进行 HERON 测量时,用户可以在两种图像捕捉模式之间选择:在用户定义的位置进行 8K 分辨率的单次拍摄(单次拍摄)或 24 fps 的视频,4K 分辨率(流式采集)。这两种类型的全景图像都可以与 3D 点云一起导出到我们的平台。
从 Reconstructor 导出
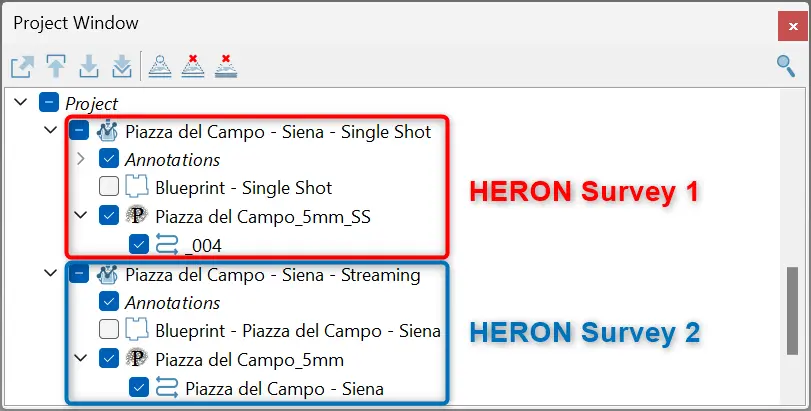
一旦在 HERON Desktop 中完成处理并将数据发送到 Reconstructor,您可以在项目窗口的"项目"标题下查看所有 HERON 测量。每个 HERON 测量组织为点云,并带有相关的轨迹和全景相机,以及一个 2D 顶视蓝图地图视图。
以下概述了使用 Reconstructor 导出和上传 HERON 点云及全景图像到平台所需的步骤:
- 在 "Heron" 菜单下,通过 "Heron share" 访问 "ATIS.cloud..." 命令。

-
首先,系统会要求您从项目中的测量列表中选择要导出的 HERON 测量。
-
然后,将打开一个专用对话框,显示需要遵循的步骤列表。
第一个步骤是选择保存文件夹。默认情况下,.e57 数据保存在 Reconstructor 项目的 Exports 文件夹中,位于以您要导出的 HERON 测量名称命名的子文件夹中,但这些都可以根据需要进行修改。
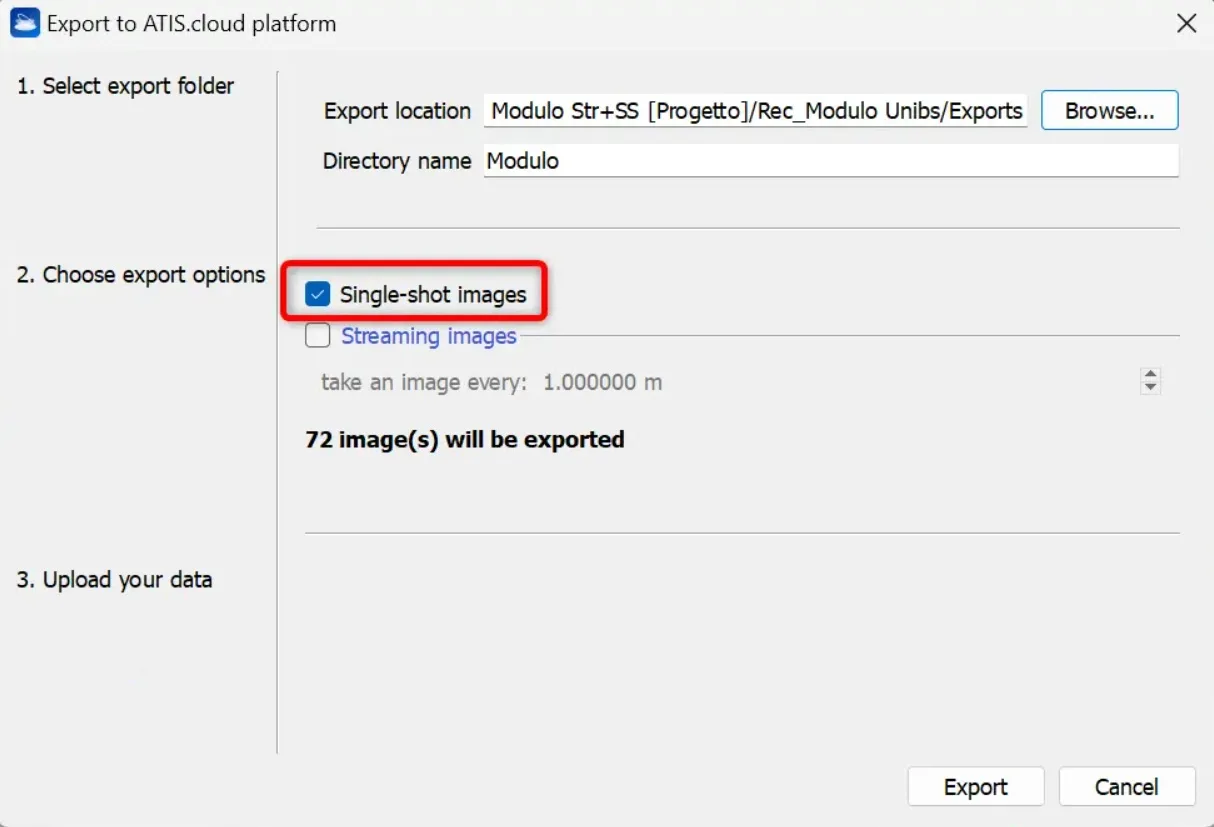
第二个步骤是选择要导出的图像类型。
- 从单次拍摄中
选择"单次拍摄图像"选项,如果 HERON 测量是在单次拍摄模式下进行的。将立即显示将生成的全景图像数量。
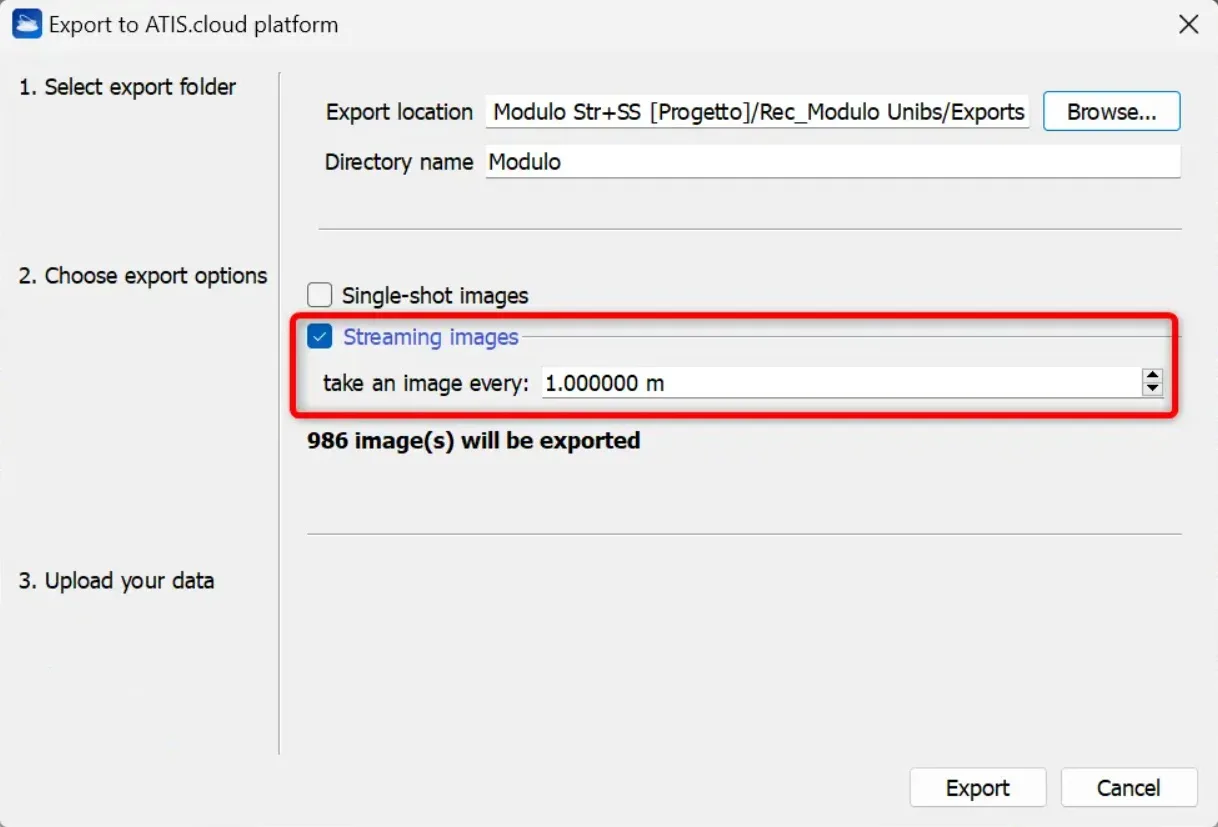
- 从流式采集中
选择"流式采集图像"选项,如果 HERON 测量是以视频方式获取的,并设置沿 HERON 测量轨迹执行的图像采样步长。将立即显示将生成的全景图像数量,允许您评估提取的数据量。
- 完成这些步骤后,按对话框右下角的"导出"按钮。
点云大小和全景图像数量决定了此过程所需的时间。
注意:导出点云的颜色对应于导出时在云的属性浏览器中设置的颜色层。
- 完成导出后,会有通知显示一切顺利,并提供选项以点击"打开文件夹"按钮立即查看数据的保存文件夹。
此时,.e57 文件已准备好通过我们的平台共享。
导入到平台
- 登录您的平台账户。
- 创建新项目或打开现有项目。
- 选择"添加文件"选项卡并上传从 Reconstructor 导出的 .e57 文件。
- 跟随上传过程并监控导入状态。
- 导入完成后,点云和全景图像将在项目中正确重叠显示。
有关更详细的说明,请参见此文章。