点云属性
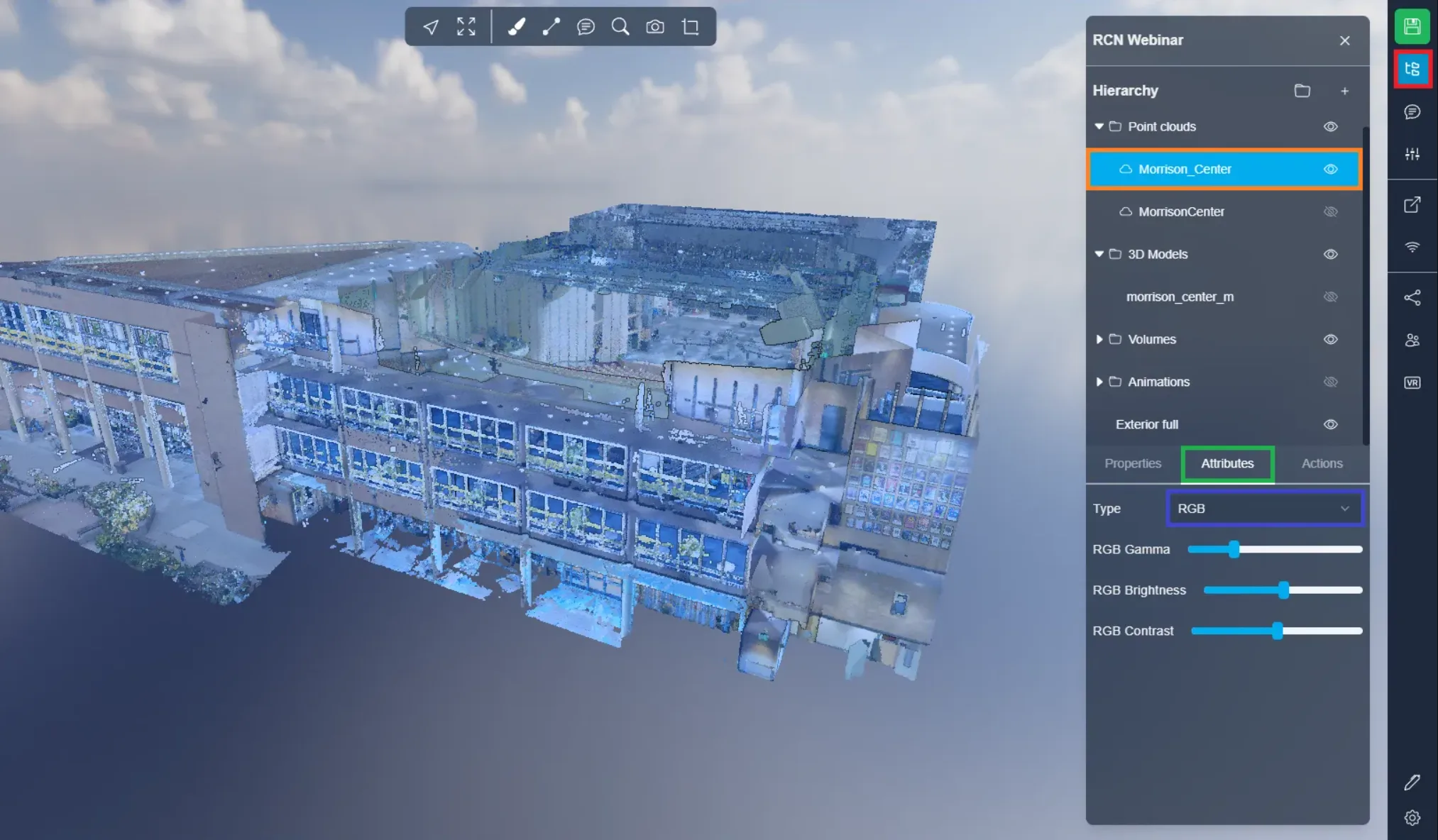
要访问点云的属性,请打开项目菜单并选择您的点云。点击属性标签,下面您会找到一个下拉菜单,列出所有可能的属性,选择您想使用的属性。以下是所有可能属性和它们功能的列表。
-
分析: 仅适用于分析点云,关于分析的更多信息,请查看这篇文章。
- 名称:更改点云的名称
- 查看位置
- 查看旋转
- 查看缩放
- 删除分析(仅从 3D 应用中删除,如果它是服务器端分析,可以稍后重新加载)
-
分类: 仅适用于兼容的点云。分类的目的是将相似的点分组为有意义的类别,如地面、植被、建筑物和其他对象。
- 显示/隐藏全部:显示或隐藏每个类别
- 每个类别一行,点击该行进行显示/隐藏,点击颜色进行更改
-
颜色: 用一种颜色为整个点云上色
- 使用调色板选择颜色
- 使用十六进制代码选择颜色
- 从默认列表中选择一种颜色
-
复合: 如果您想同时使用多个选项,请拖动滑块增加/减少其使用量。
- RGBA:彩色点云
- 伽玛:基本上是点云的曝光度,较低的伽玛表示较高曝光度,较高的伽玛表示较低曝光度,呈现日落效果
- 亮度:点云的亮度,较低的亮度会使其变暗,较高的亮度会使其变亮。
- 对比度:改变点云的对比度,较低的对比度会使点云变灰,较高的对比度会使标准颜色(红、黄、绿、蓝等)过曝
- 强度:信号的强度或大小
- 范围:从低强度到高强度
- 伽玛:基本上是点云的曝光度,较低的伽玛表示较高曝光度,较高的伽玛表示较低曝光度,呈现日落效果
- 亮度:点云的亮度,较低的亮度会使其变暗,较高的亮度会使其变亮。
- 对比度:改变点云的对比度,较低的对比度会使点云变灰,较高的对比度会使标准颜色(红、黄、绿、蓝等)过曝
- 高度:每个点的高度或垂直位置
- 高度范围:设置渐变的开始和结束高度
- 渐变模式
- 钳制:标准渐变,范围之外保持边缘的最终颜色
- 重复:当渐变结束时,从原始颜色重新开始
- 镜像重复:渐变结束时,新渐变反向,与重复类似,但没有颜色不连续
- 渐变方案:更改渐变的颜色,只有从预定义列表中选择
- 分析:只有在该点云上可用时,模型到点云的比较
- 分类:只有在该点云上可用时,区分不同类型的对象(地面、植被、建筑物等)
- 返回数量:获取该点所需的脉冲数
- 点源 ID:按扫描 ID 分组
- RGBA:彩色点云
-
高度: 它代表了每个点的高度或垂直位置。高度数据在点云的许多应用中非常重要,如地形测绘、洪水建模、城市规划和基础设施设计。通过分析高度数据,可以创建准确详细的数字高程模型(DEMs),用于各种地理空间分析和可视化目的。
- 高度范围:设置渐变的开始和结束高度
- 渐变模式
- 钳制:标准渐变,范围之外保持边缘的最终颜色
- 重复:当渐变结束时,从原始颜色重新开始
- 镜像重复:渐变结束时,新渐变反向,与重复类似,但没有颜色不连续
- 渐变方案:更改渐变的颜色,只有从预定义列表中选择
-
GPS 时间: GPS 时间是与点云中每个点相关的重要属性。它提供了激光脉冲发射和返回脉冲的时间信息,从而可以准确计算点的位置和距离。此外,GPS 时间还可用于质量控制和分析目的。通过分析点云中 GPS 时间值的分布,可以识别出时间异常或错误区域,这可能表明数据或 LiDAR 系统存在问题。
-
索引: 索引是与 LiDAR 点云中每个点相关的属性,为点的空间属性及与云中其他点的关系提供附加信息。它们通常用于支持高级分析和处理任务,如分割、分类和特征提取。LiDAR 点云处理中可以使用多种类型的索引,包括:
- 法向量:该索引代表点相对于其局部邻域的方向。可以用于识别平面表面或估计表面的法线以进行表面重建。
- 曲率:该索引代表点表面上的局部曲率。可以用于识别锋利的边缘或估计曲面曲率半径。
- 高于地面:该索引表示点高于地面或参考表面的高度。可用于地形建模或识别在地面表面以上或以下的对象。
- 相对高度:该索引表示点相对于其邻近点的高度。可以用于识别高于或低于其周围环境的对象。
- 密度:该索引表示点周围本地邻域中的点密度。可以用于识别点密度高或低的区域,如植被或建筑立面。
-
强度: 它代表了捕获点时传感器或设备接收到的信号的强度或大小。在某些情况下,强度与点处对象的反射率相关。例如,在 LiDAR 点云中,强度值表示传感器从对象返回的激光光线的多少。在这种情况下,较高强度值表示反射更多光的表面,如白色墙壁,而较低强度值表示反射更少光的表面,如黑色汽车。在其他情况下,强度可以表示不同的物理量。例如,在摄影点云中,强度可能表示用于生成点云的原始图像中像素的亮度。
- 范围:从低强度到高强度
- 伽玛:基本上是点云的曝光度,较低的伽玛表示较高曝光度,较高的伽玛表示较低曝光度,呈现日落效果
- 亮度:点云的亮度,较低的亮度会使其变暗,较高的亮度会使其变亮。
- 对比度:改变点云的对比度,较低的对比度会使点云变灰,较高的对比度会使标准颜色(红、黄、绿、蓝等)过曝
-
强度梯度: 它是点云中相邻点之间强度变化的测量值。代表了强度随距离或位置变化的速率。强度梯度通过在点云中对强度值进行梯度计算来得到。这涉及到对每个点的 x、y 和 z 坐标的强度值的偏导数的计算。每个点的梯度向量的大小代表了强度梯度值。高强度梯度值表明锋利的边缘或边界,而低值表明平滑或渐进的过渡。
- 范围:从低强度到高强度
- 伽玛:基本上是点云的曝光度,较低的伽玛表示较高曝光度,较高的伽玛表示较低曝光度,呈现日落效果
- 亮度:点云的亮度,较低的亮度会使其变暗,较高的亮度会使其变亮。
- 对比度:改变点云的对比度,较低的对比度会使点云变灰,较高的对比度会使标准颜色(红、黄、绿、蓝等)过曝
-
细节级: 在 LiDAR 点云处理过程中,细节级(LOD)可以指点云中的点密度、数据的分辨率或用于表示数据的抽象级别。例如,具有高细节级的点云会有高点密度、高分辨率和精细的抽象级别。相反,具有低细节级的点云将会有较低的点密度、较低的分辨率和粗略的抽象级别。
-
材质捕捉: 在 LiDAR 点云处理中,材质捕捉可用于为从点云创建的 3D 模型添加视觉纹理和阴影效果。通过对 3D 模型应用材质捕捉纹理,可以创建更真实感、更具视觉吸引力的场景表示。例如,可以用材质捕捉纹理来模拟混凝土墙或树皮的外观,增加 3D 模型的深度和真实感。
- 选择要应用的纹理
-
返回数量: 这表示为了捕获该特定点而发射和返回到 LiDAR 传感器的激光脉冲总数。与返回序号类似,返回数量通常是 1 到 5 或更多的值,具体取决于使用的 LiDAR 系统。总返回数量可以提供关于被扫描对象或场景复杂性和结构的信息。例如,高返回数量的点可能表示具有多个层或复杂几何形状的对象,如树冠或建筑立面。
-
点源 ID: 它标识生成点的特定激光传感器。LiDAR 系统中的每个激光传感器都有唯一的 ID 或编号,这些信息记录在点云数据中,以便进行分析和质量控制。点源 ID 在使用多个 LiDAR 传感器捕获单个场景或区域的情况下尤为有用。通过识别哪个传感器生成了每个点,可以对数据进行质量控制检查,并确保不同传感器之间的数据正确对齐和注册。这在森林资源管理等应用中特别重要,在这种应用中,可能使用多个 LiDAR 传感器从不同角度和视角捕捉数据。在我们的平台上,点源 ID 用于存储源扫描 ID,这使用户可以轻松跟踪点云中每个点的来源。例如,如果使用 3D 激光扫描仪对同一区域进行了多次扫描,则每次扫描可以分配一个唯一的扫描 ID,并将点云中每个点的点源 ID 属性设置为相应的扫描 ID。
-
RGBA: 它用于表示点云中每个点的颜色。红色、绿色和蓝色通道用于表示点的颜色,而 alpha 通道用于表示点的透明度或不透明度。在 LiDAR 点云中使用颜色有助于可视化和解释目的,因为它可以提供有关点所代表的对象和表面特性的重要信息。例如,在植被映射中,点的颜色可以用于区分不同类型的植被或识别高或低植被密度的区域。
- 伽玛:基本上是点云的曝光度,较低的伽玛表示较高曝光度,较高的伽玛表示较低曝光度,呈现日落效果
- 亮度:点云的亮度,较低的亮度会使其变暗,较高的亮度会使其变亮。
- 对比度:改变点云的对比度,较低的对比度会使点云变灰,较高的对比度会使标准颜色(红、黄、绿、蓝等)过曝
-
返回序号: 这表示为捕获该特定点而发射和返回到 LiDAR 传感器的激光脉冲的次数。与返回数量类似,返回序号通常为 1 到 5 之间的值,1 表示第一次返回,5 表示第五次返回。第一次返回代表从对象顶部反射的激光脉冲,而随后的返回可能代表从较低表面或对象内多次反射。
-
扫描角度级别: 这表示发射激光脉冲以捕获特定点时,激光束与扫描仪参考线之间的角度。扫描角度级别提供了关于点捕获角度的信息,值为 0 表示扫描仪的参考线,正值或负值表示与参考线的偏差。在建筑物提取中,扫描角度级别可用于根据其相对于扫描仪参考线的方向识别建筑立面和屋顶结构。在路面分析中,扫描角度级别可用于检测表面的缺陷或不规则性。
-
用户数据: 它允许用户向点云中添加标准属性(如 XYZ 坐标、强度和返回数)之外的附加信息。用户数据可用于存储广泛的信息,如 RGB 颜色值、分类标签或与点相关的元数据。例如,用户数据可以用来指示一个点是建筑物的一部分、树木还是道路,或存储关于点测量质量或其不确定性的信息。用户数据的使用取决于用户的具体需求和应用。它可用于各种任务,如对象识别、分类、分割和映射。通过向点云中添加定制的用户数据,可以提取更有意义的信息并执行更高级的分析和处理任务。
如果您的点云最初未正确显示,请尝试使用 RGBA 或强度属性,因为它们是最常用的。
在这篇文章中了解如何编辑点云的显示属性。
如果您遇到任何问题,我们的支持团队随时为您提供帮助。探索愉快!