Lägg till 360°-bilder i ett projekt
Plattformen är kompatibel med 360°-bilder. Om du har ett ReCap-projekt och du har 360°-bilder behöver du bara komprimera ReCap-projektet och skicka det; 360°-bilderna kommer att behållas.
I vissa fall, om du har en e57-fil, kan 360°-bilder ingå beroende på verktyget som användes för att exportera e57-filen. I så fall behåller plattformen 360°-bilderna (till exempel behåller Cyclone REGISTER 360 bilderna om e57-filen är strukturerad, och NavVis och Geoslam behåller också bilderna i e57-filen).
Annars kan du ladda upp bilderna vid sidan av, efter att ditt punktmoln har laddats upp och aktiverats, öppna uppladdningssidan igen och släpp en .zip-fil som innehåller dina bilder.
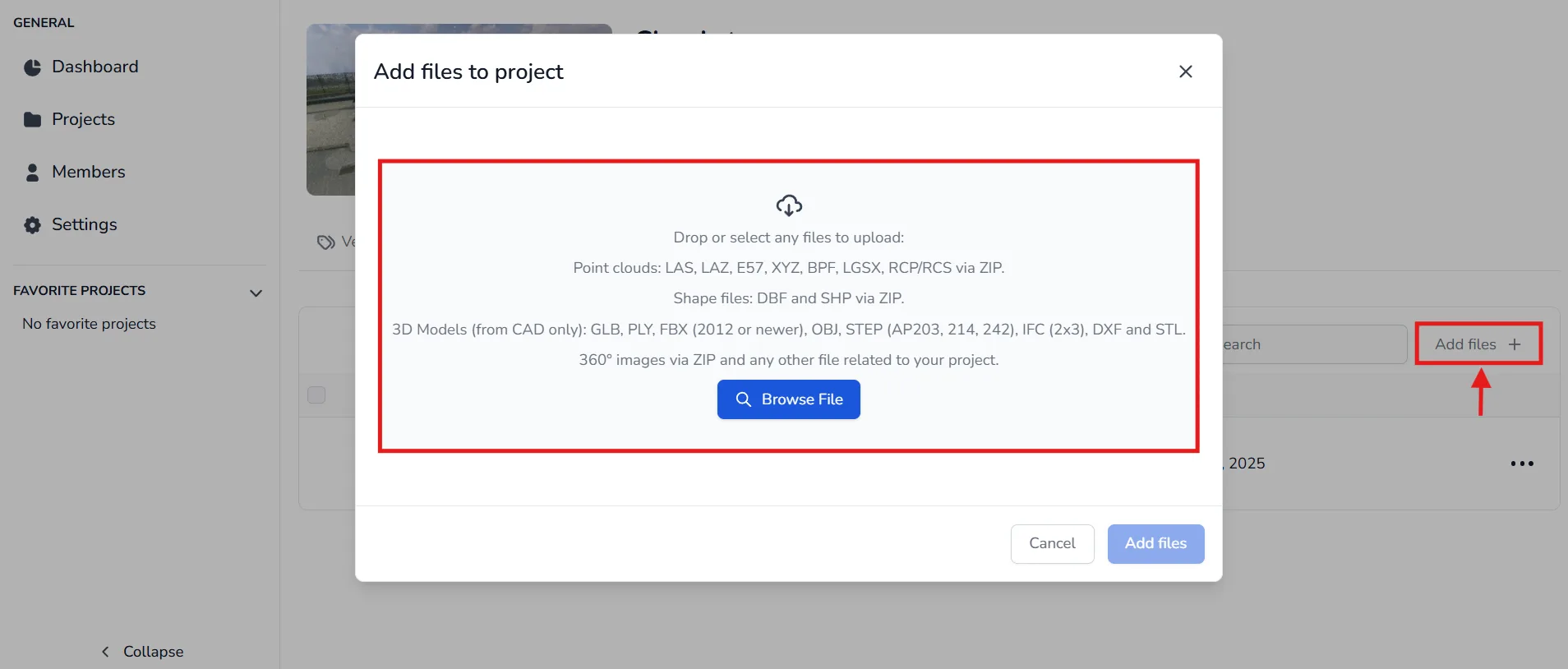
Lär dig om de olika .zip-filerna beroende på vilken skanner som används nedan. För att ladda upp dina bilder, släpp din .zip-fil, plattformen kommer automatiskt att känna igen vilken bildtyp du laddade upp.
För fasta skannrar behövs ingen CSV-fil som innehåller positionsinformation, eftersom datan kommer från en terrestrisk skanning och därför är strukturerad; vi behöver bara länka bilderna till deras station. Allt vi behöver är en TXT-fil som talar om för plattformen vilken programvara bilderna kommer från. Bilderna och TXT-filen bör packas i en fil som laddas upp till plattformen.
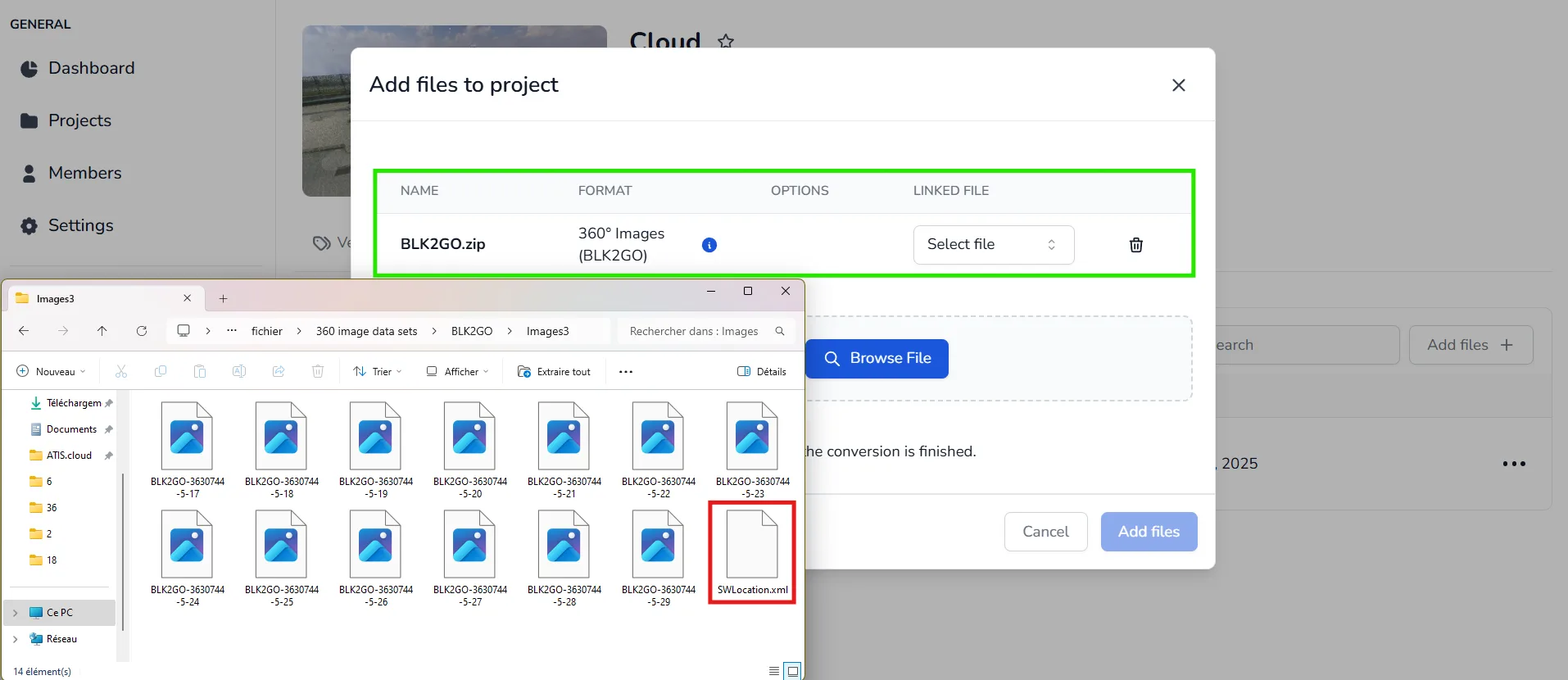
- Leica BLK2GO
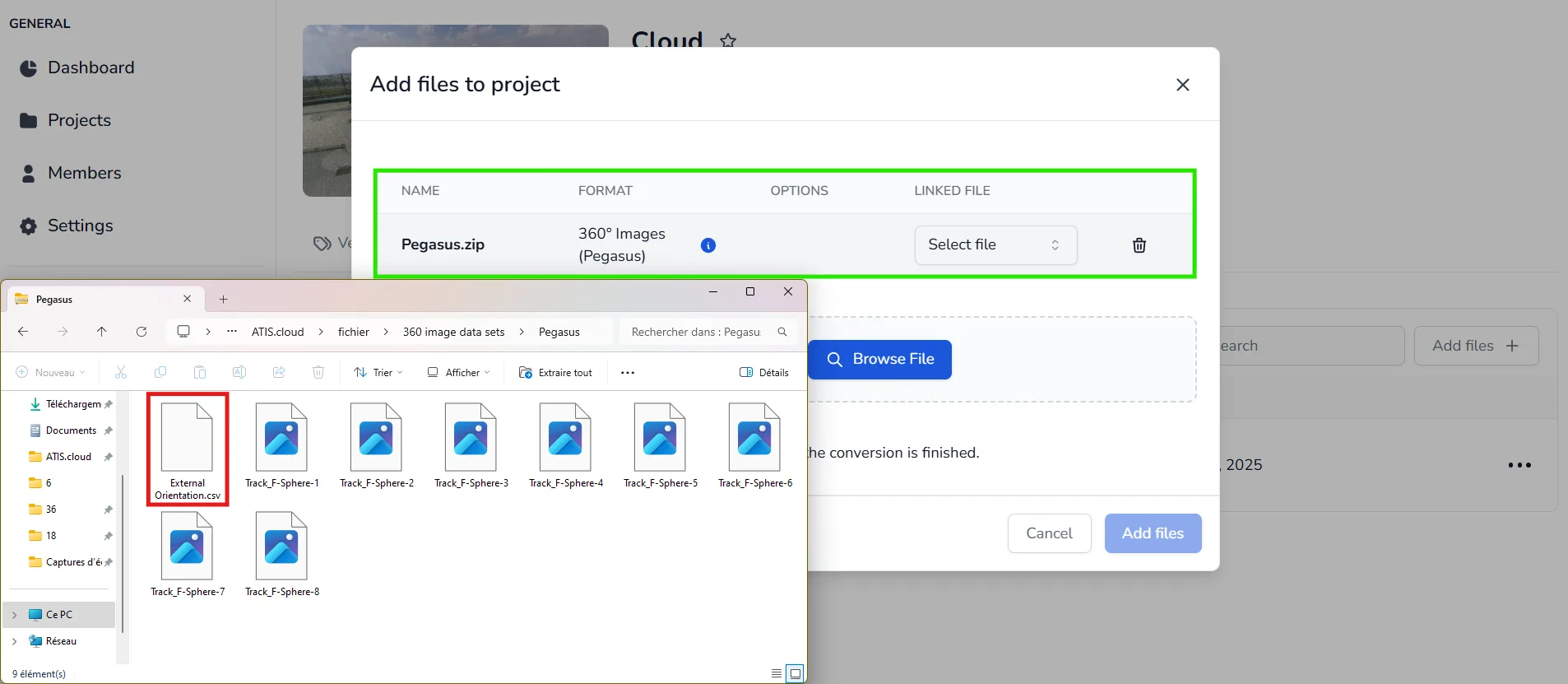
- Leica Pegasus
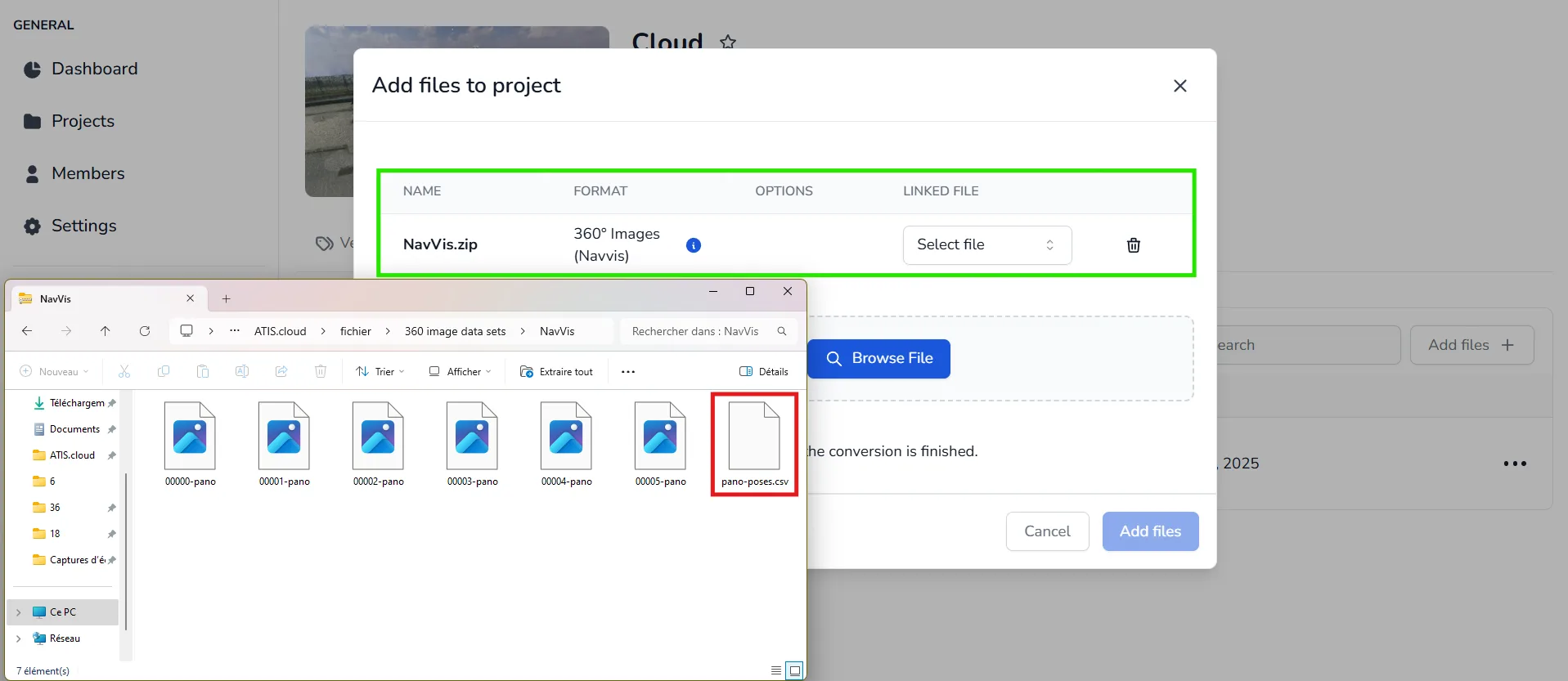
- NavVis
- FARO
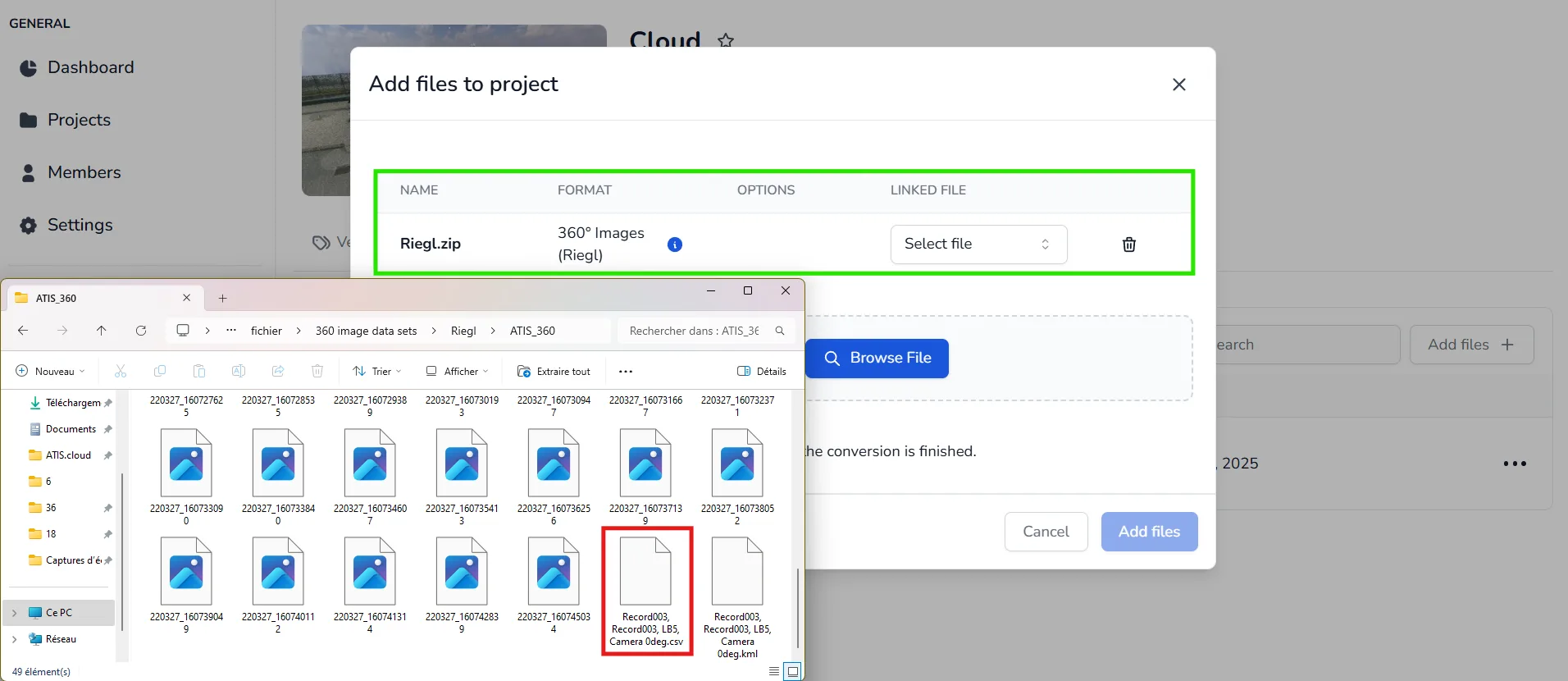
- Riegl
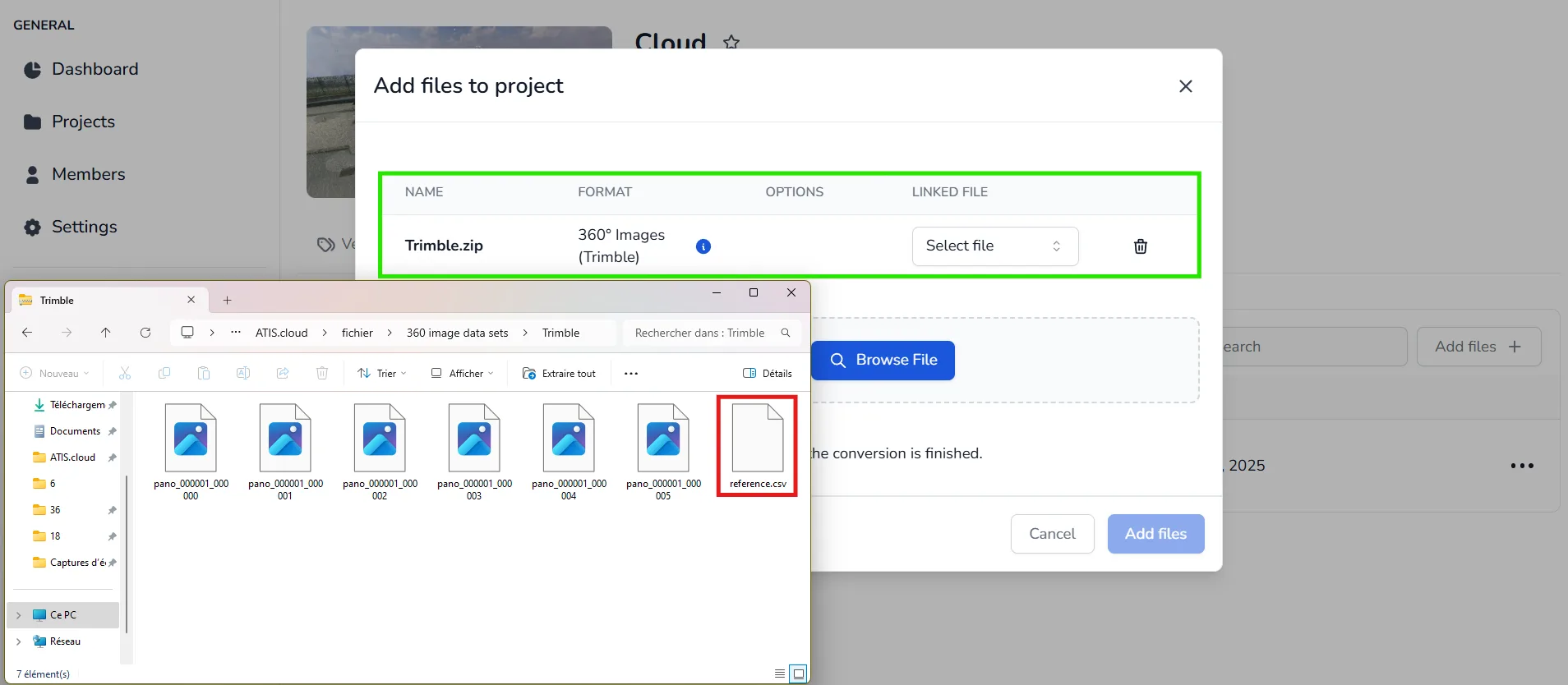
- Trimble MX9
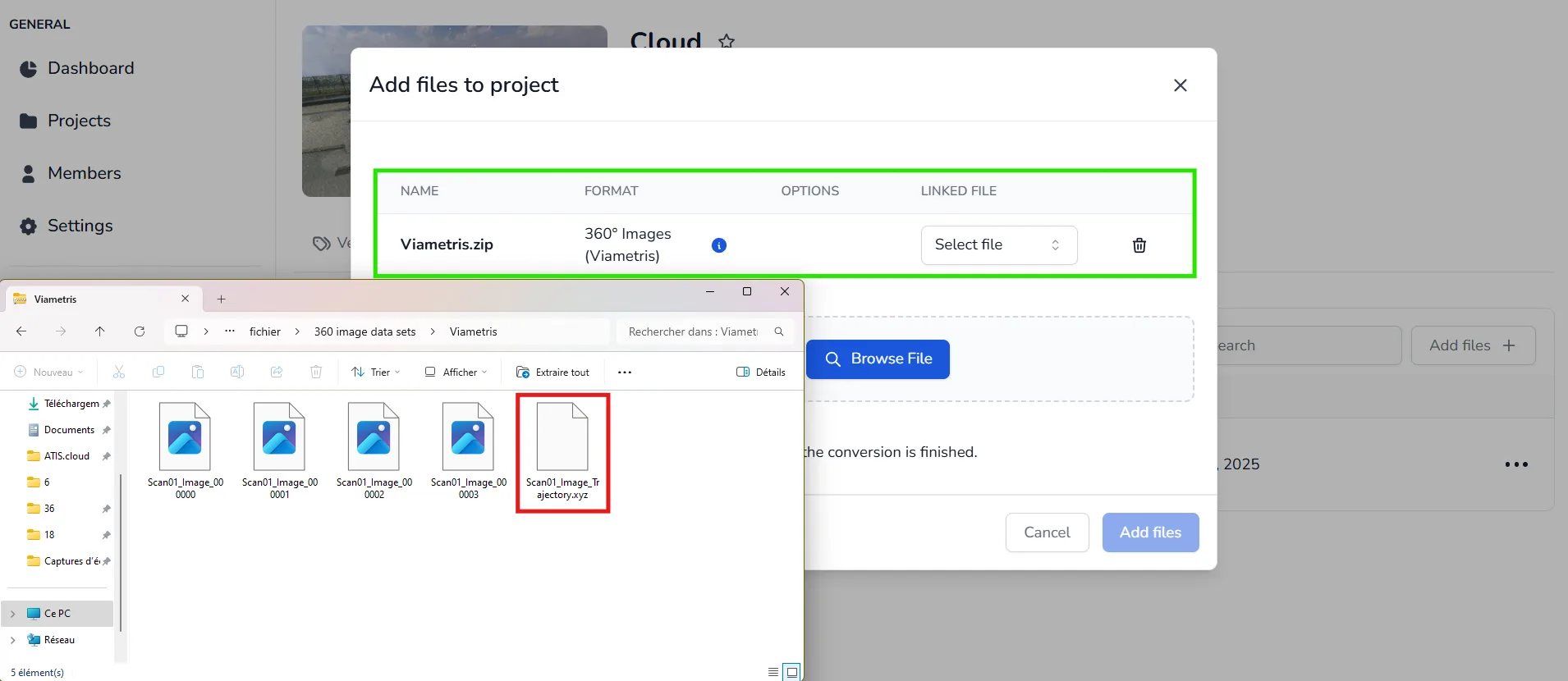
- Viametris
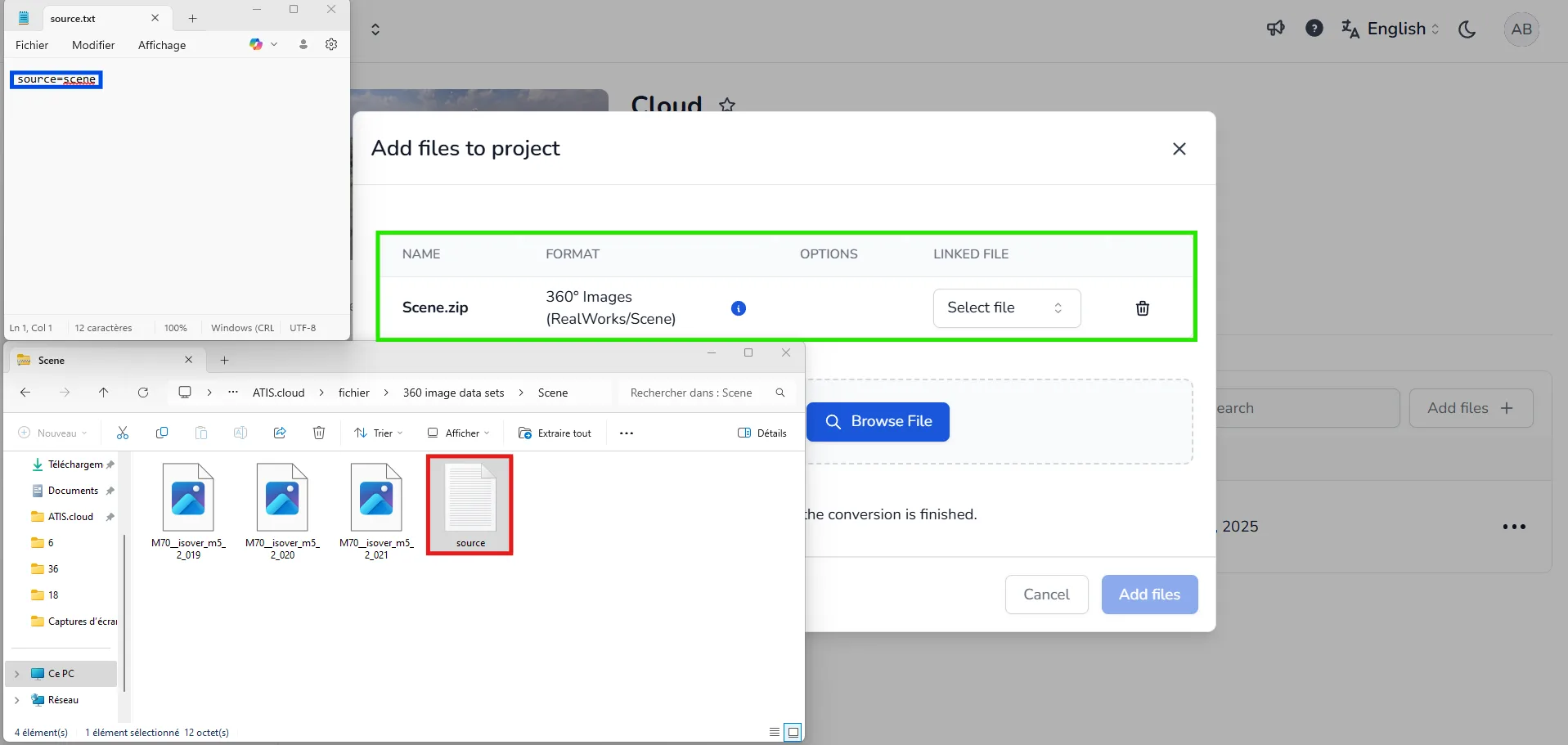
- Realworks
- Mosaic
- XGRIDS
- CHCNAV
- 📂Använd XML-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
- Alternativt kan du importera en .LGSx-fil som inkluderar dina 360°-bilder, eftersom denna filtyp stöds.
- 📂Använd filen "External Orientation.csv" tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
- Alternativt kan du importera en .LGSx-fil som inkluderar dina 360°-bilder, eftersom denna filtyp stöds.
- 📂Använd CSV-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
- Alternativt kan du importera en E57-fil från NavVis som inkluderar dina 360°-bilder. Se denna dedikerade artikel
- 📂När ditt ZIP-arkiv är klart, ladda upp det till ditt projekt. Systemet kommer automatiskt att upptäcka om det kommer från FARO Scene. Vänligen se exempelbilden för att verifiera att den nödvändiga
.txt-filen finns i ZIP:en, vilket är avgörande för korrekt igenkänning och bearbetning.📥 - Alternativt kan du importera en E57-fil från Faro Scene som inkluderar dina 360°-bilder. Se denna dedikerade artikel
📂Använd CSV-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
📂Använd CSV-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
-
📂Använd XYZ-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
⚠️ Regel för bildnamngivning : Alla 360°-bilder måste följa det erforderliga namngivningsformatet, till exempel: image_000000.jpg, image_000001.jpg, image_000002.jpg, och så vidare, med en kontinuerlig inkrementell numrering.
-
Alternativt kan du direkt importera en E57-fil som inkluderar dina 360°-bilder.
Observera att med den senaste versionen av PPiMMS-programvaran kan du välja MultiCams Trajectory Orientation. Plattformen är för närvarande kompatibel med alternativet "y front, x right, z up (legacy)". Se till att du har detta alternativ valt innan du exporterar bilderna från PPiMMS .

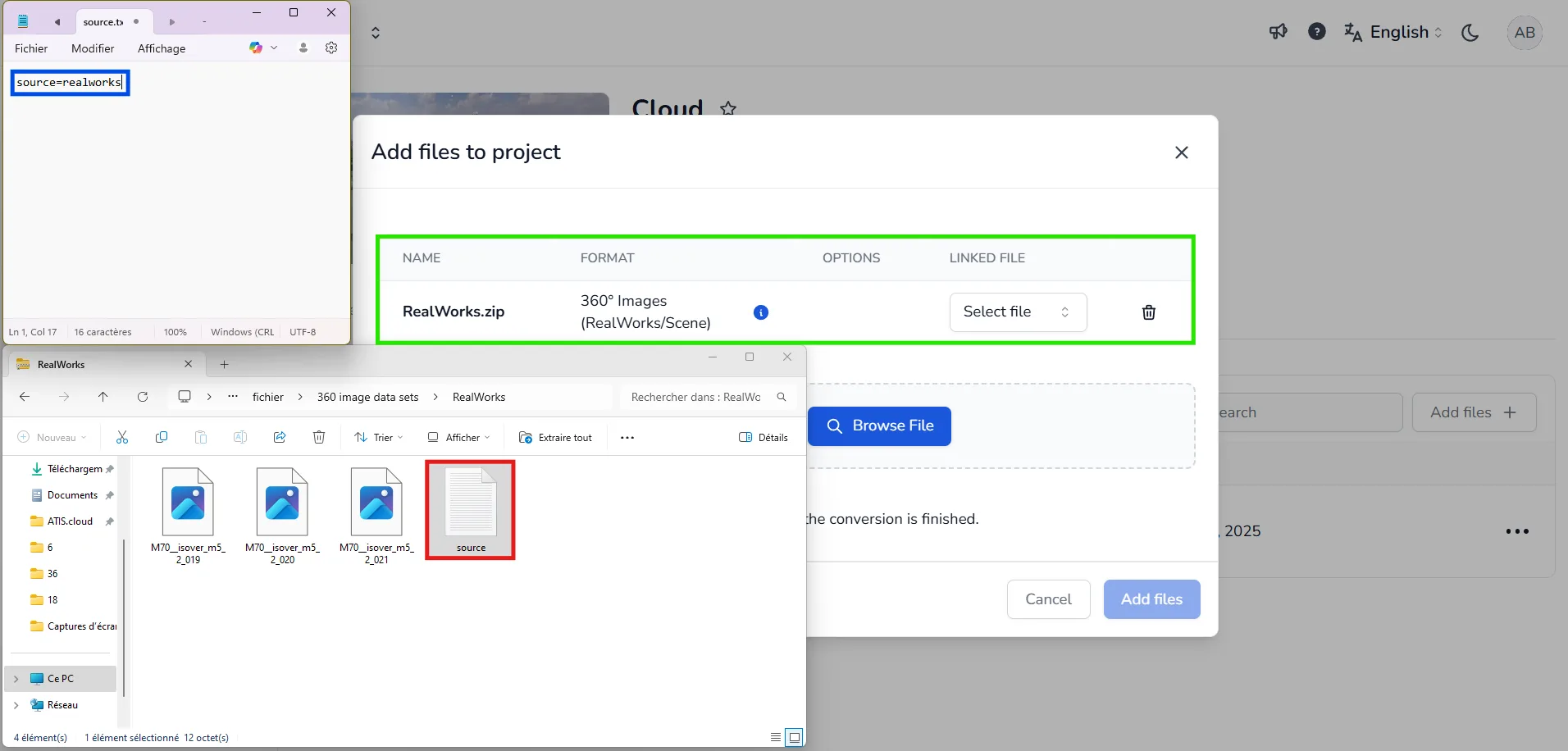
📂När ditt ZIP-arkiv är klart, ladda upp det till ditt projekt. Systemet kommer automatiskt att upptäcka om det kommer från Trimble Realworks. Vänligen se exempelbilden för att verifiera att den nödvändiga .txt-filen finns i ZIP:en, vilket är avgörande för korrekt igenkänning och bearbetning.📥
📂Använd CSV-filen tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
⬇️ Vänligen ladda ner CSV-mallfilen för att förbereda din Mosaic-bildimport.
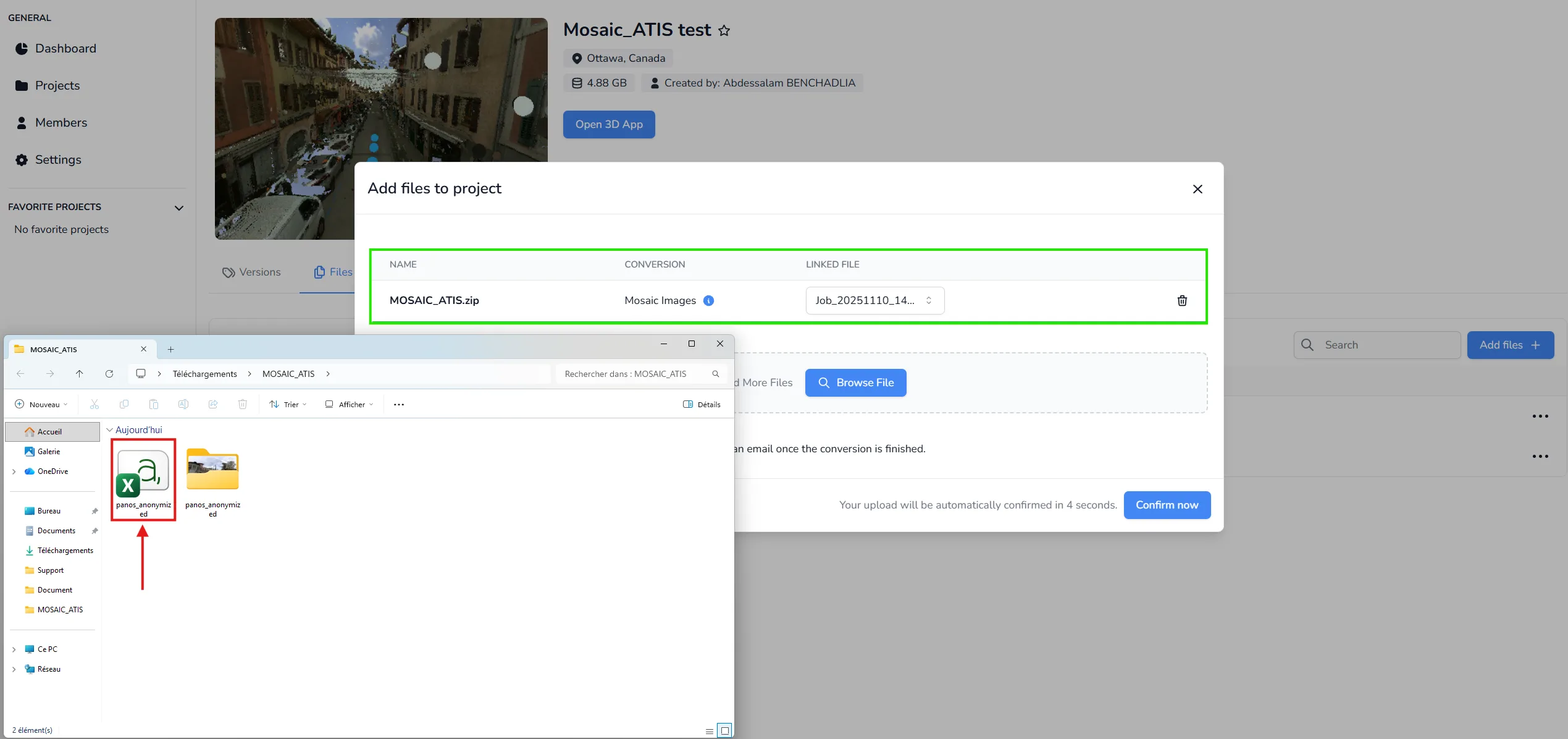
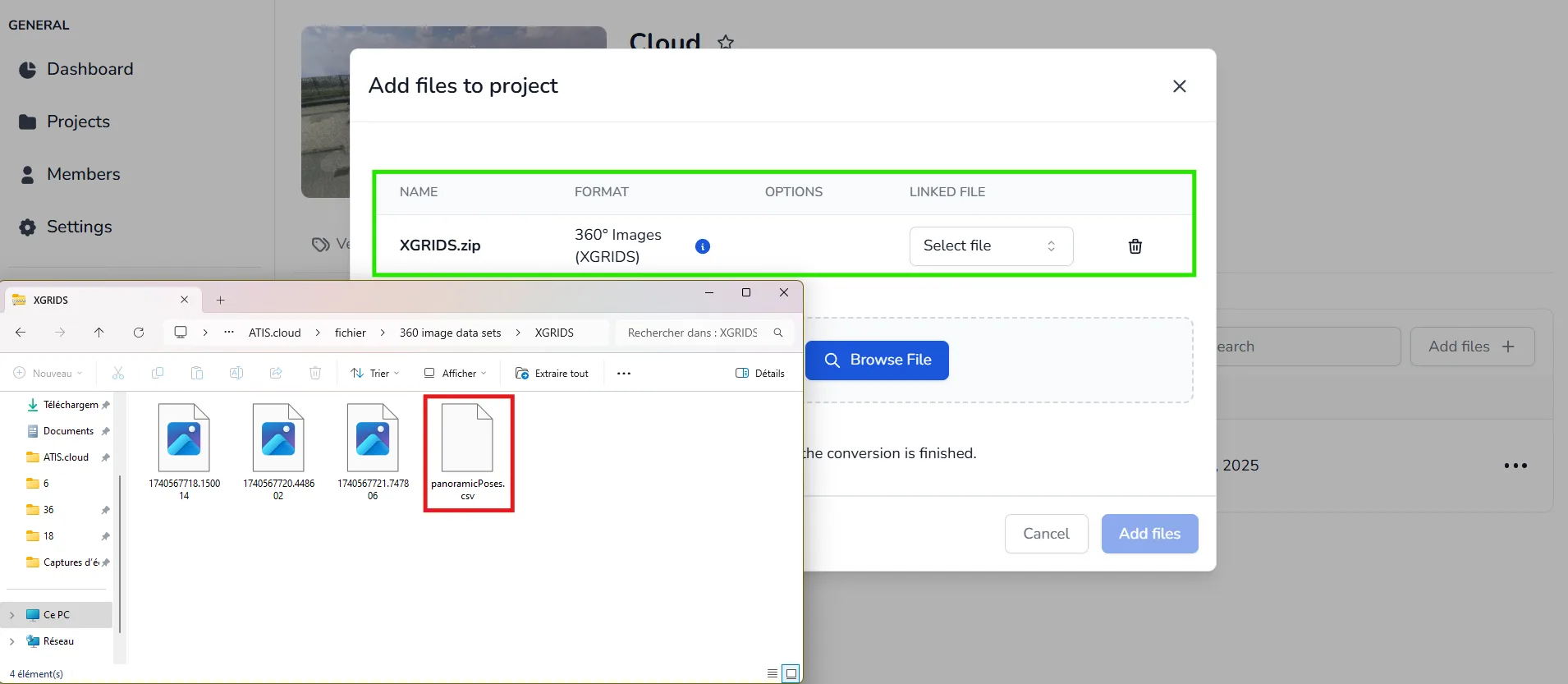
📂Använd filen "panoramicPoses.csv" tillsammans med dina bilder och packa ihop allt i en zip-fil.📥
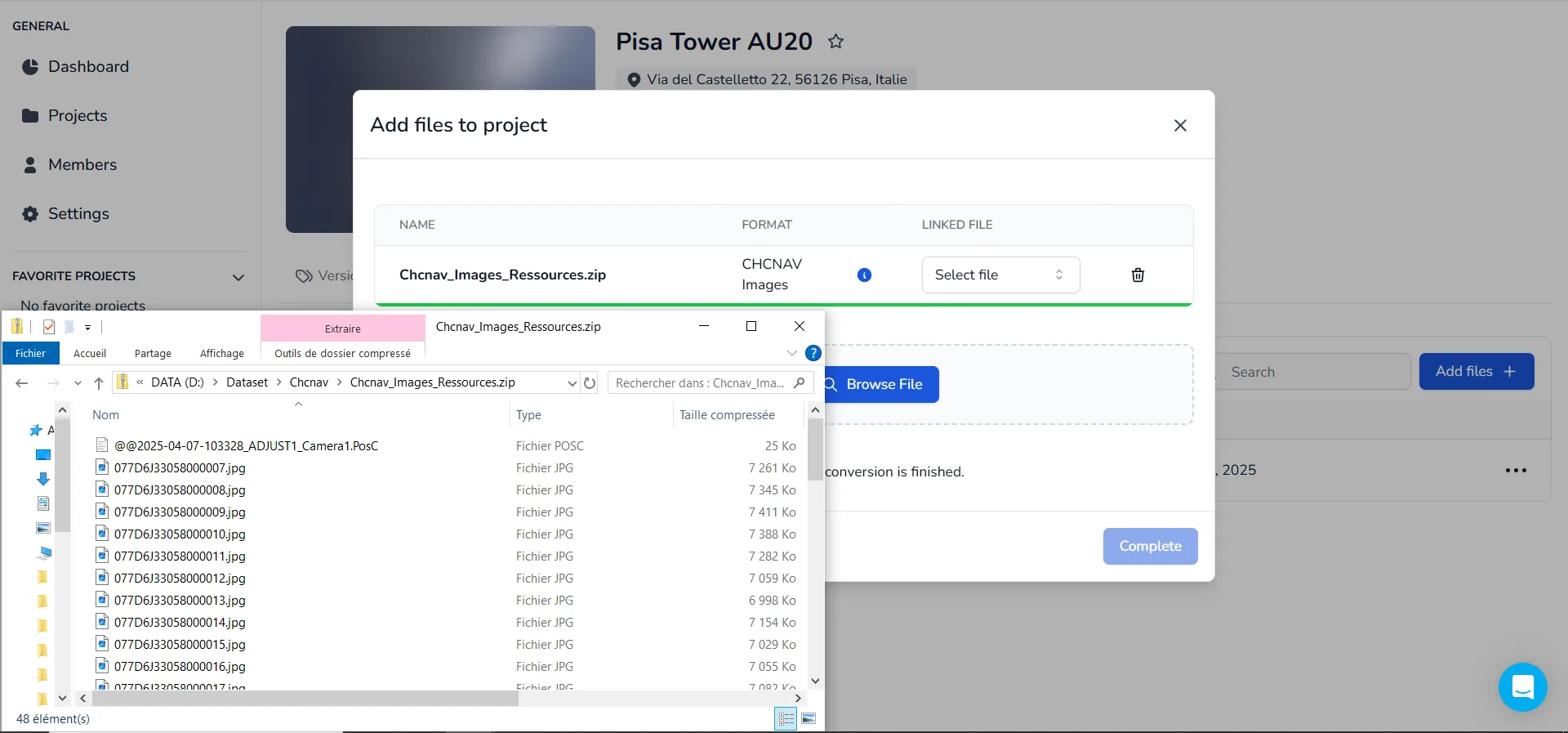
📂Använd PosC-filen tillsammans med dina bilder och packa ihop allt i en zip-fil. PosC-filen följer formatet "@@yy-mm-dd-id_ADJUST1_Camera1.PosC". Systemet kommer automatiskt att upptäcka om det kommer från CHCNAV.📥 Se denna dedikerade artikel.
Vid problem eller svårigheter, tveka inte att kontakta plattformsteamet.