Autodesk Revit-plugin - Hantering av punktmoln
Om Autodesk Revit-pluginet inte är installerat på din dator kan du först gå till artikeln "Autodesk Revit Plug-in - Installation" och sedan återkomma hit efter denna åtgärd.
Tips: För att fullständigt följa instruktionerna i denna artikel rekommenderar vi att du först lägger till ett punktmoln. Om detta inte görs, gå till artikeln "Autodesk Revit Plug-in - Infoga ett punktmoln"
"Point Cloud Manager" är ett grafiskt gränssnitt som gör det möjligt att modifiera parametrarna för varje punktmoln i Autodesk Revit-projektet från webbplatsen. Detta fönster gör att du kan flytta, ändra storlek på gränssnittet samt förankra det till en sida av Autodesk Revit-skärmen.
För att börja, klicka på ett punktmoln som finns i "Point Cloud Manager"-fönstret. Om gränssnittet inte visas, klicka på "Point Cloud Manager"-knappen som finns i "Cloud"-verktygsfältet i kategorin "Lägg till punktmoln".
En del av "Point Cloud Manager"-gränssnittet har visats. Gränssnittet är uppdelat på följande sätt:
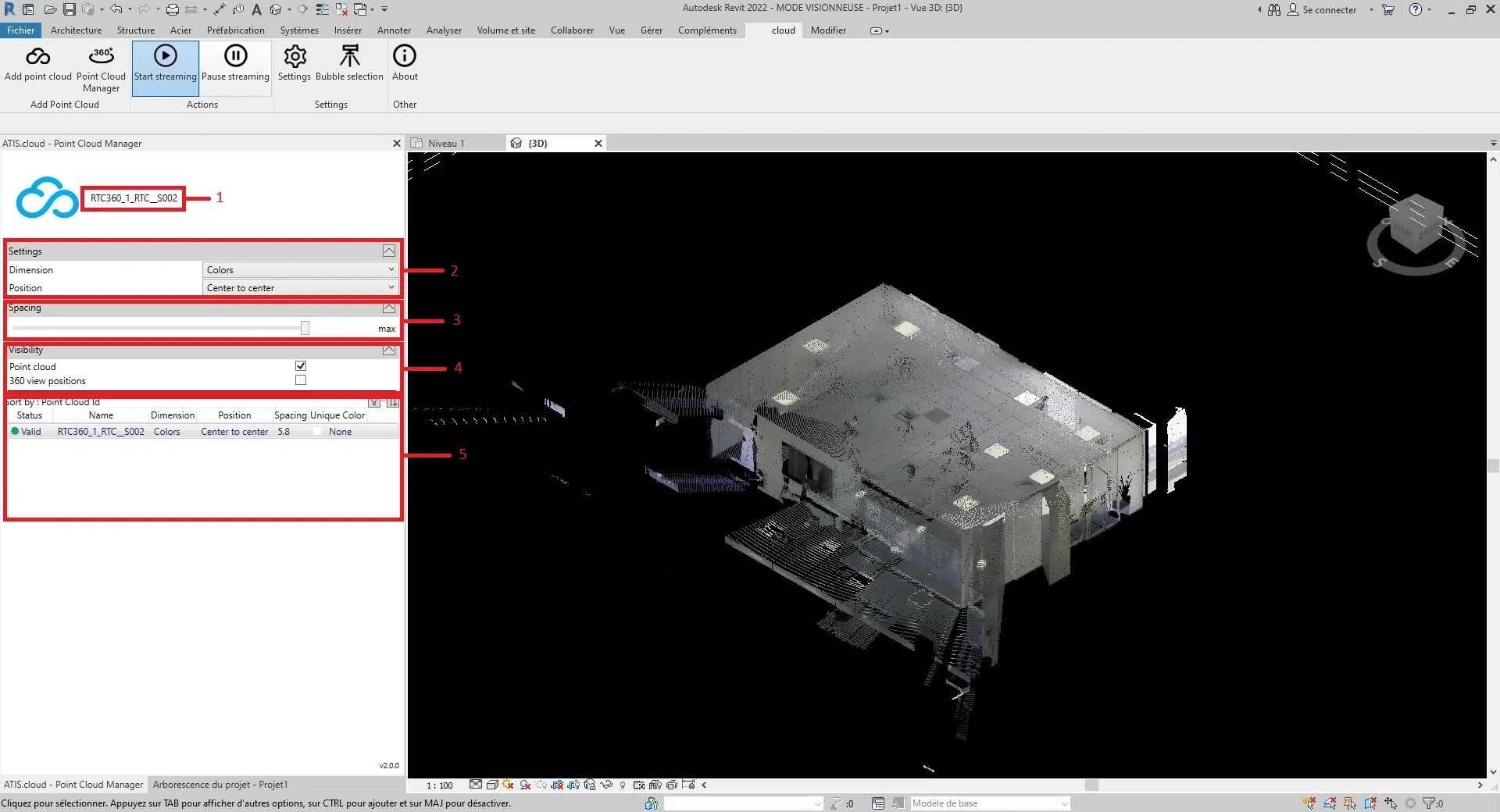
1: Namnet på det valda molnet, namnet som visas är detsamma som på webbprojektet
2: Egenskaper för molnet såsom dimension och position
3: Avståndet mellan varje punkt i molnet
4: Synlighet för punktmoln och skannrar (för mer information om skannrar, gå till artikeln "Scanner Autodesk Revit")
5: Alla moln som har infogats via Autodesk Revit-pluginet; det ger en översikt över huvudparametrarna för varje moln samt möjliggör sortering.
- Trick:
- Du kan fälla ihop och fälla ut sektioner genom att använda knappen med pilen till höger om varje sektion;
- Du kan ändra storleken mellan del 6 och resten genom att hålla ned och sedan flytta musen över den svarta linjen som ligger mellan "Synlighet"- sektionen och del 6.
Du kan nu modifiera varje parameter för varje punktmoln.
- Dimensionen av molnet; gå till sektionen "Ändra dimension";
- Positionen av molnet; gå till sektionen "Redigera position";
- Avståndet mellan punkterna i molnet; gå till sektionen "Modifiera avstånd";
- Synligheten för molnet eller skannrar; gå till "Ändra synlighet"- sektionen.
För att modifiera den valda dimensionen, klicka på urvalsboxen till höger om "Dimension".
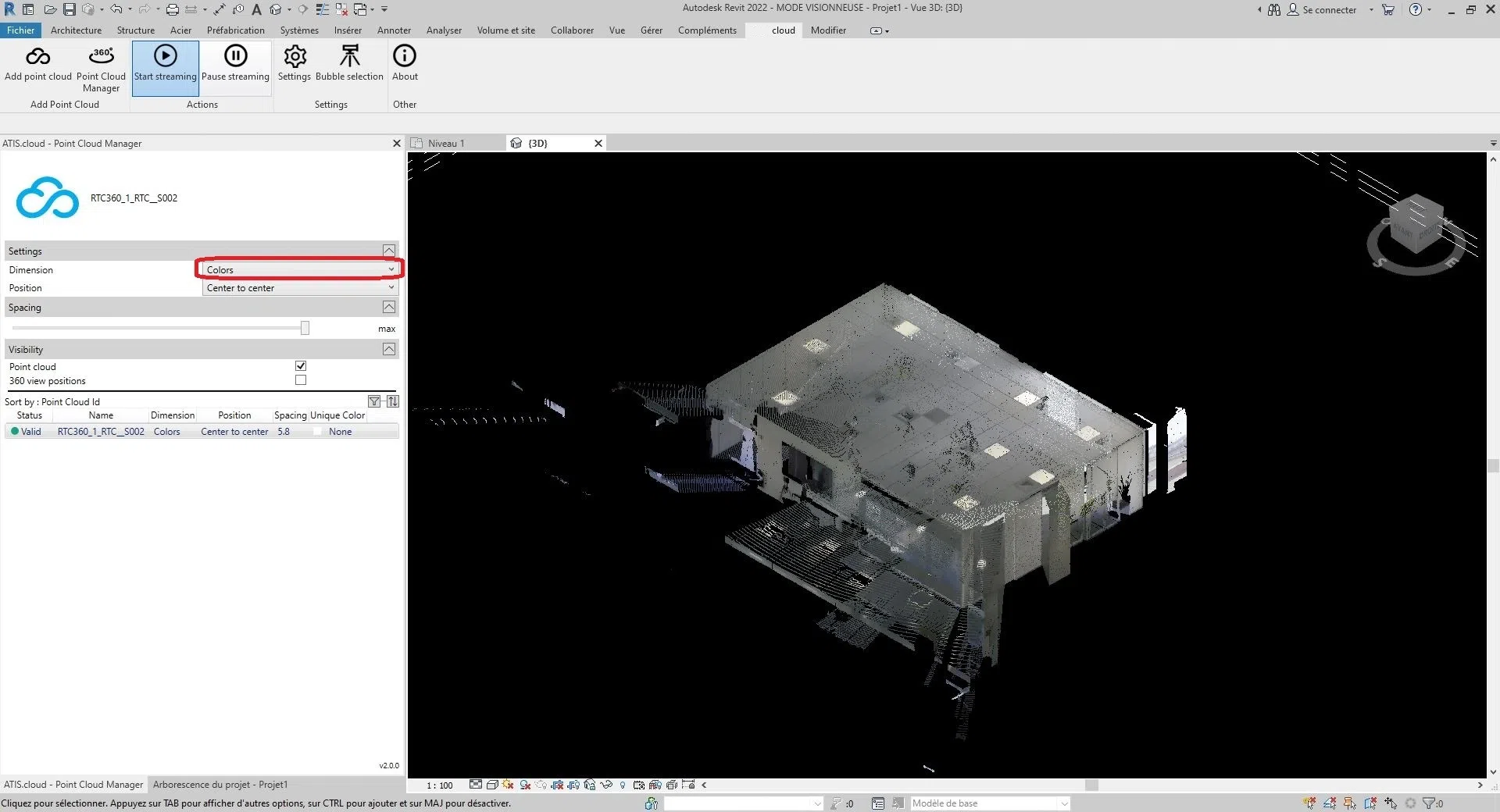
Det finns sex storlekar att välja mellan:
Färger, Intensitet, Klassificering, Höjd, Punktkälla-ID och Unik färg.
- Färger: Används för att representera färgen på varje punkt i punktmolnet. De röda, gröna och blå kanalerna används för att representera färgen på punkten, medan alfakanalen används för att representera transparens eller opacitet av punkten. Användningen av färg i LiDAR-punktmoln kan vara användbar för visualiserings- och tolkningsändamål, eftersom det kan ge ytterligare information om egenskaperna hos de objekt och ytor som representeras av punkterna. Till exempel, vid vegetationskartläggning kan färgen på punkterna användas för att särskilja mellan olika typer av vegetation eller för att identifiera områden med hög eller låg vegetationsdensitet.
- Intensitet: Representerar styrkan eller amplituden av signalen som togs emot av en sensor eller enhet när punkten fångades. I vissa fall är intensiteten relaterad till objektets reflektans vid den punkten. Till exempel, i ett LiDAR-punktmoln representerar intensitetsvärdet mängden laserljus som har reflekterats tillbaka till sensorn av objektet. I detta fall skulle ett högre intensitetsvärde indikera en yta som reflekterar mer ljus, som en vit vägg, medan ett lägre intensitetsvärde skulle indikera en yta som reflekterar mindre ljus, som en svart bil. I andra fall kan intensiteten representera en annan fysisk kvantitet. Till exempel, i ett fotografiskt punktmoln kan intensitet representera ljusheten av en pixel i den ursprungliga bilden som användes för att generera punktmolnet.
- Klassificering: Kommer endast att fungera med kompatibla punktmoln. Syftet med klassificering är att gruppera liknande punkter i meningsfulla kategorier, såsom jord, vegetation, byggnader och andra objekt.
- Höjd: Representerar höjden eller den vertikala positionen för varje punkt. Höjddata är viktigt i många punktmolnanvändningar, såsom topografisk kartläggning, översvämningsmodellering, stadsplanering och infrastrukturdesign. Genom att analysera höjddata är det möjligt att skapa exakta och detaljerade digitala höjdmodeller (DEM) som kan användas för ett brett spektrum av geospatial analys och visualisering.
- Punktkälla-ID: Detta identifierar den specifika lasersensorn som genererade punkten. Varje lasersensor i ett LiDAR-system har en unik identifierare eller nummer, och denna information registreras i punktmolnsdata för att möjliggöra analys och kvalitetskontroll. Identifiering av punktkälla är särskilt användbar i situationer där flera LiDAR-sensorer används för att fånga en enda scen eller område. Genom att identifiera vilken sensor som genererade varje punkt är det möjligt att utföra kvalitetskontroller på datan och säkerställa att datan är korrekt justerad och registrerad mellan de olika sensorerna. Detta är särskilt viktigt i tillämpningar som skogsbruk, där flera LiDAR-sensorer kan användas för att fånga data från olika vinklar och perspektiv. På vår plattform används punktkälla-ID för att lagra källskannings-ID, så att användare enkelt kan spåra vilken analys varje punkt i punktmolnet har sitt ursprung från. Om exempelvis flera skanningar utfördes på samma område med en 3D-laserscanner kan varje skanning tilldelas ett unikt skannings-ID och punktkälla-ID-attributet för varje punkt i punktmolnet kan ställas in till det motsvarande skannings-ID:t.
- Unik färg: Syftet med "Unik färg"-dimensionen är att kunna färga punktmolnet med en unik färg definierad av användaren.
För att modifiera den valda positionen, klicka på urvalsboxen till höger om "Position".
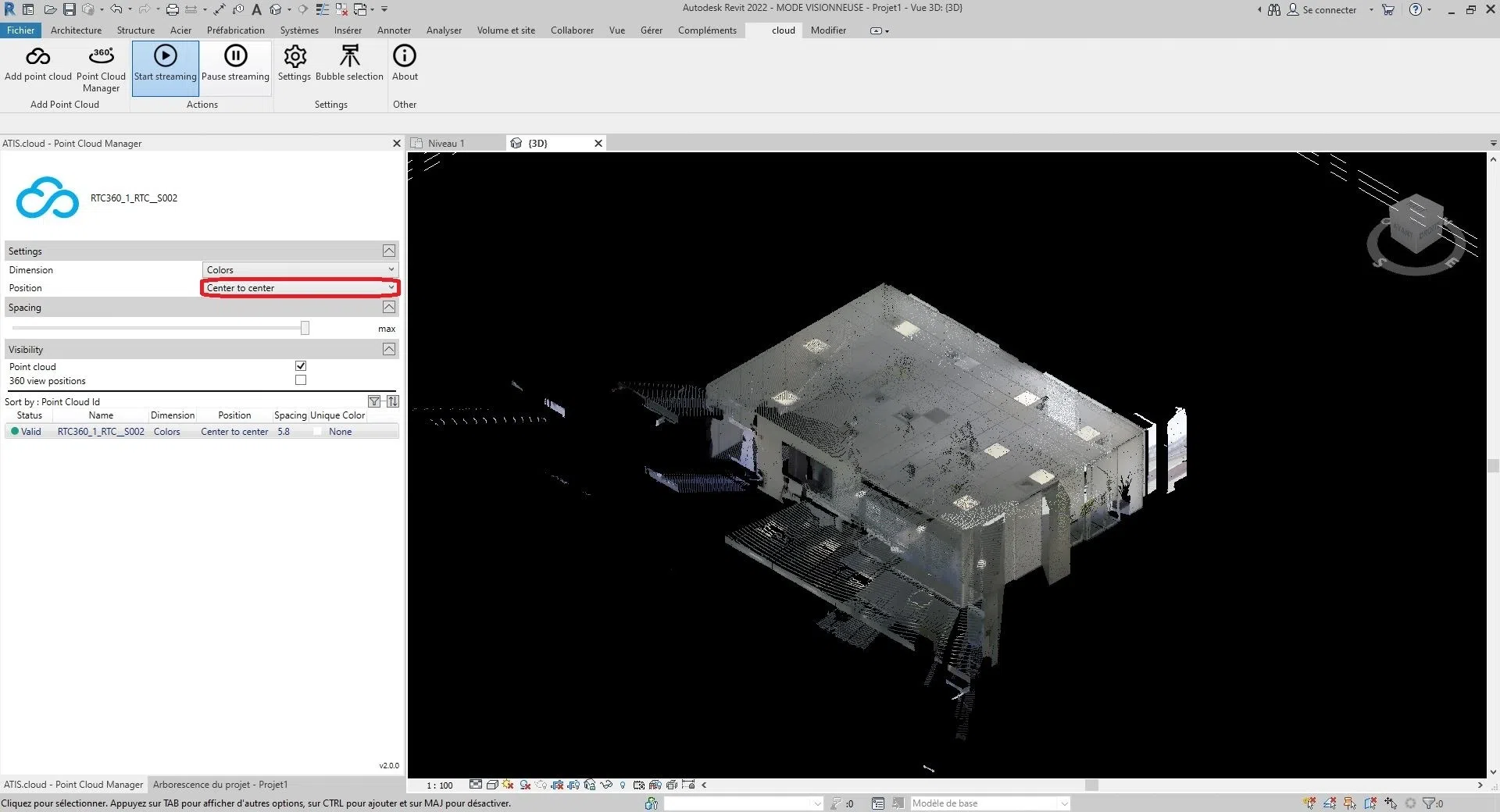
Du kommer att ha möjlighet att välja mellan dessa tre alternativ:
"Center to Center", "Internt ursprung" eller "Vid den delade platsen".
- Center to Center: Detta alternativ placerar punktmolnet med hjälp av mitten av vyfönstret som referenspunkt.
- Internt ursprung: Detta alternativ placerar punktmolnet med molnets interna ursprungspunkt som referens. Den interna ursprungspunkten definieras vanligtvis av punktmolnets eget koordinatsystem. Genom att använda detta alternativ kommer punktmolnet att positioneras enligt sin interna ursprungspunkt snarare än ursprungspunkten för Autodesk Revit-projektet. Detta kan vara användbart när du behöver justera punktmolnet till sitt eget interna koordinatsystem.
- Vid den delade platsen: Detta alternativ placerar punktmolnet på platsen för den delade platsen. Delad plats refererar till en gemensam geografisk plats som flera projekt kan baseras på. Genom att använda detta alternativ kommer punktmolnet att positioneras enligt koordinaterna för den delade platsen. Detta kan vara användbart när man arbetar med projekt baserade på en gemensam plats och vill justera punktmolnet till den delade platsen.
- Auto - Ursprunget till senast placerad: Autodesk Revit placerar det nästa importerade punktmolnet i enlighet med det tidigare importerade punktmolnet. Detta alternativ aktiveras efter att ha infogat ett första punktmoln. Du kan flytta detta första moln, till exempel för att justera det korrekt med modellen. Om du har ytterligare punktmoln skapade på samma plats och i samma koordinatsystem som det första, rekommenderas det att använda detta alternativ för att infoga de ytterligare punktmolnen. De nya punktmolnen kommer då att positioneras korrekt i förhållande till det första.
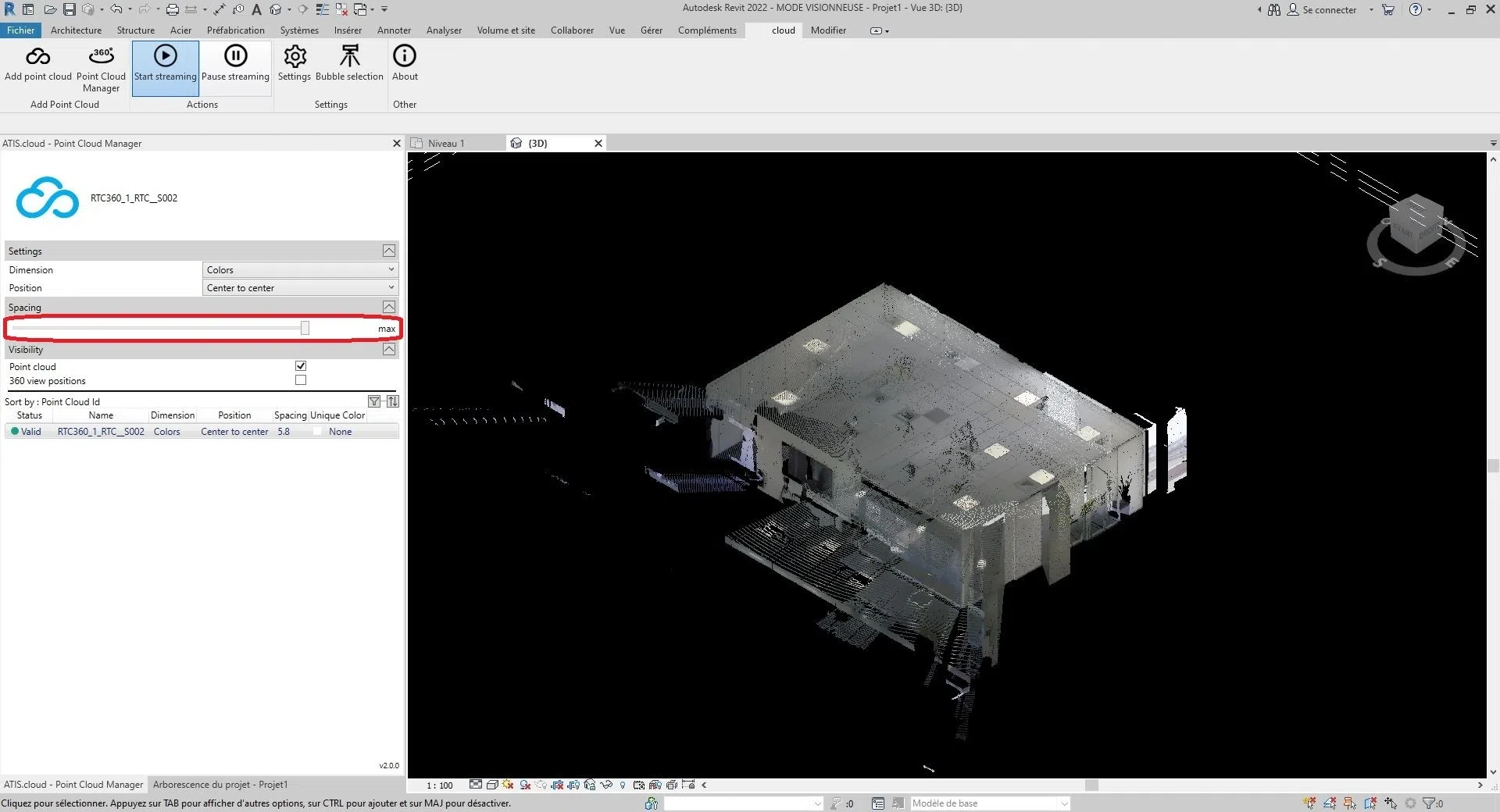
För att modifiera avståndet mellan punkterna i molnet, flytta reglaget i avsnittet "Avstånd".
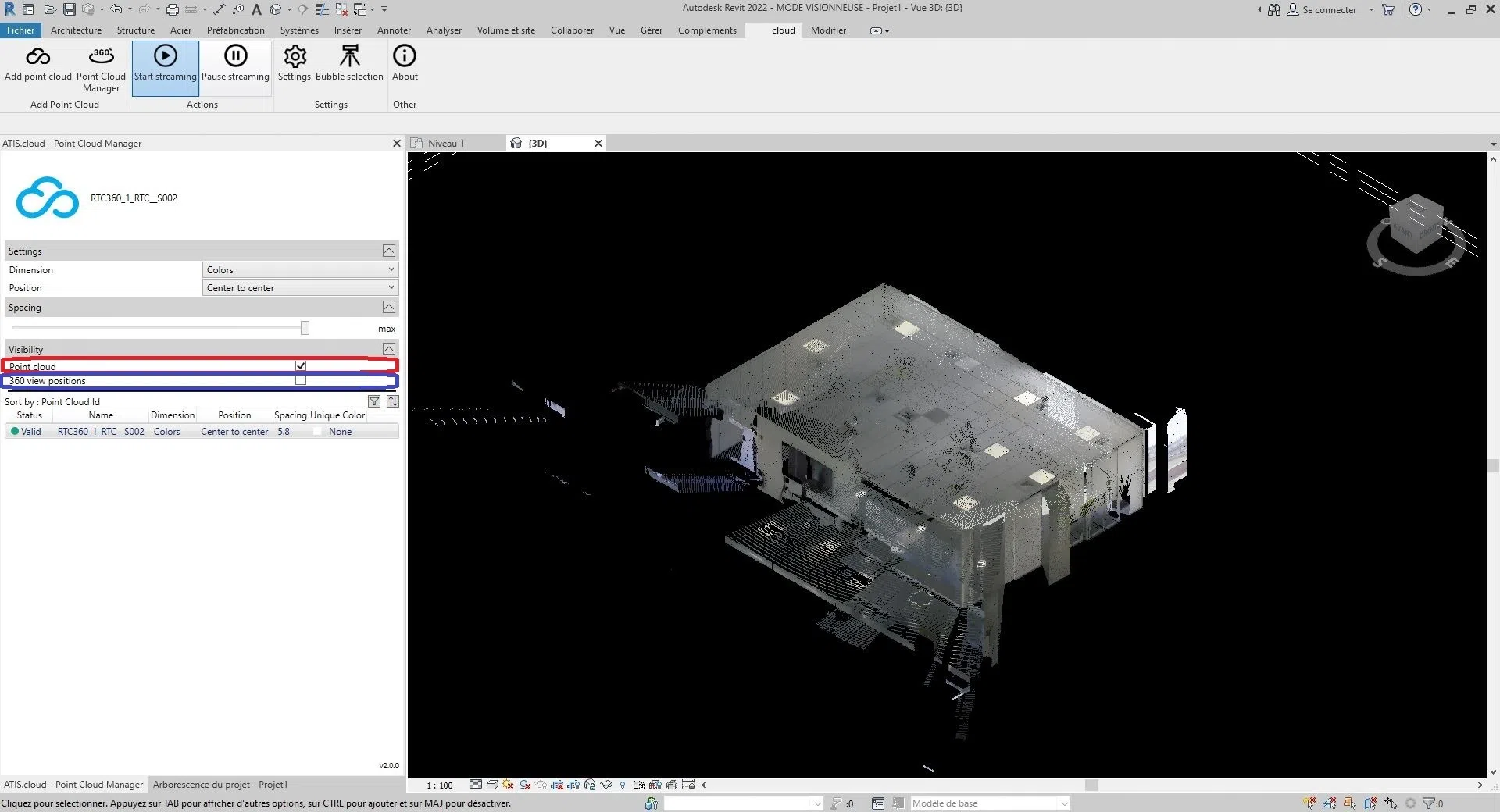
För att ändra synligheten har du två alternativ. Antingen kan du visa/dölja punktmolnet genom att markera/avmarkera boxen till höger om "Punktmoln" i avsnittet "Synlighet". Eller så kan du visa/dölja punktmoln-sensorerna genom att markera/avmarkera boxen till höger om "360 Visning" i avsnittet "Synlighet". (Synligheten är densamma mellan de olika vyerna av projektet)
- Tips:
- Skannerinformation finns i kategorin "Bubble management".
- För att zooma in på ett punktmoln i 3D-applikationen, dubbelklicka helt enkelt på det motsvarande molnet.
Grattis! Du vet nu allt om "Point Cloud Manager"-gränssnittet.
Om du stöter på några problem är vårt supportteam här för att hjälpa till. Lycka till med utforskandet!