Punktmolnsattribut
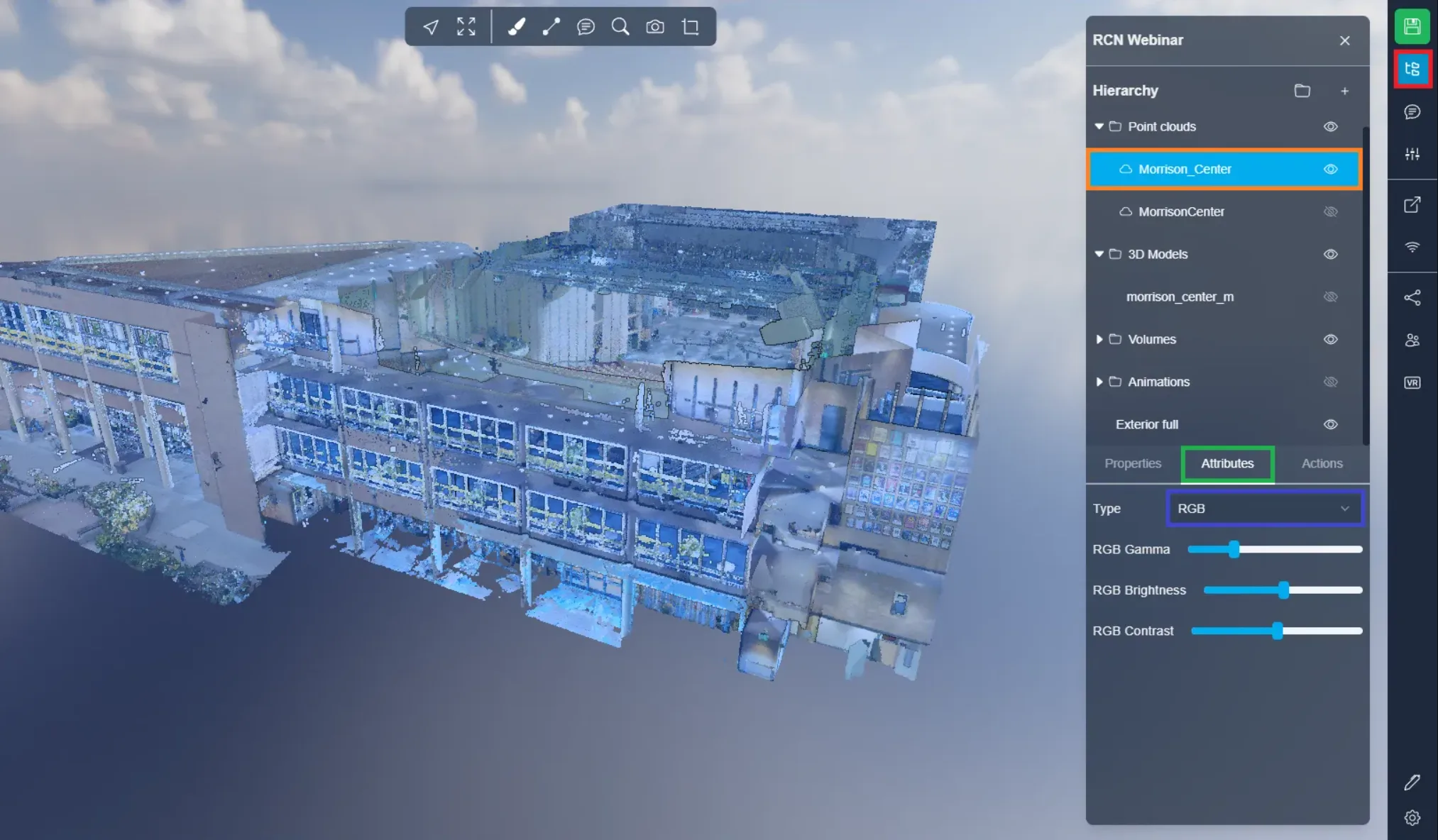
För att få åtkomst till ett punktmolns attribut, öppna projektmenyn och välj ditt punktmoln. Klicka på Attributfliken, nedan hittar du en rullgardinsmeny som listar alla möjliga attribut, välj det du vill använda. Du hittar en lista över alla möjliga attribut och vad var och en gör nedan.
-
Analysera: Fungerar endast med analys-punktmoln, för mer information om analys, se denna artikel.
- Namn: Ändra namnet på punktmolnet
- Se positionen
- Se rotationen
- Se skalan
- Radera analysen (kommer endast att radera det från 3D-applikationen, det kan laddas om senare om det är en serverbaserad analys)
-
Klassificering: Fungerar endast med kompatibla punktmoln. Målet med klassificering är att gruppera liknande punkter till meningsfulla kategorier, såsom mark, vegetation, byggnader och andra objekt.
- Visa / dölj alla: visar eller döljer varje kategori
- En rad per kategori, klicka på raden för att visa / dölja den, klicka på färgen för att ändra den
-
Färg: Färglägger hela punktmolnet med en färg
- Välj en färg med hjälp av paletten
- Använd en hexadecimal kod för att välja färgen
- Välj en av färgerna från standardlistan
-
Komposit: Använd detta om du vill använda flera alternativ samtidigt, dra reglagen för att öka/minska deras användning.
- RGBA: Färglagt punktmoln
- Gamma: I princip exponeringen av punktmolnet, lägre gamma motsvarar högre exponering, högre gamma, lägre exponering, ger ett solnedgångsutseende.
- Ljushet: Punktmolnets ljushet, lägre ljushet gör det mörkare, högre ljushet gör det ljusare.
- Kontrast: Ändrar kontrasten av punktmolnet, lägre kontrast gör att punktmolnet blir grått, högre kontrast överexponerar standardfärgerna (röd, gul, grön, blå...)
- Intensitet: Styrkan eller storleken av signalen
- Område: Från låg intensitet till hög
- Gamma: I princip exponeringen av punktmolnet, lägre gamma motsvarar högre exponering, högre gamma, lägre exponering, ger ett solnedgångsutseende.
- Ljushet: Punktmolnets ljushet, lägre ljushet gör det mörkare, högre ljushet gör det ljusare.
- Kontrast: Ändrar kontrasten av punktmolnet, lägre kontrast gör att punktmolnet blir grått, högre kontrast överexponerar standardfärgerna (röd, gul, grön, blå...)
- Höjd: Höjd eller vertikal position för varje punkt
- Höjdområde: sätter var gradienten börjar och slutar i termer av höjd
- Gradientläge
- Clamp: Standardgradient, utanför området, behåller den slutliga färgen på kanten
- Upprepa: När gradienten slutar, startar om från originalfärgen
- Spegelupprepa: När gradienten slutar, sätts en ny gradient omvänd, liknar upprepa förutom att det inte finns något färgavbrott
- Gradientschema: Ändra färgerna på gradienten, val endast från en fördefinierad lista
- Analysera: Endast om tillgänglig på det punktmolnet, modell till punktmolnjämförelse
- Klassificering: Endast om tillgänglig på det punktmolnet, kategoriserar olika typer av objekt (mark, vegetation, byggnader...)
- Antal återkomster: Antal pulser som behövdes för att få den punkten
- Punktkälla-ID: Grupperat efter skannings-ID
- RGBA: Färglagt punktmoln
-
Höjd: Det representerar höjden eller den vertikala positionen av varje punkt. Höjduppgifter är viktiga i många tillämpningar av punktmoln, såsom topografisk kartläggning, översvämningsmodellering, stadsplanering och infrastrukturdesign. Genom att analysera höjddata är det möjligt att skapa noggranna och detaljerade digitala höjdmodeller (DEMs) som kan användas för en rad geospatiala analys- och visualiseringsändamål.
- Höjdområde: sätter var gradienten börjar och slutar i termer av höjd
- Gradientläge
- Clamp: Standardgradient, utanför området, behåller den slutliga färgen på kanten
- Upprepa: När gradienten slutar, startar om från originalfärgen
- Spegelupprepa: När gradienten slutar, sätts en ny gradient omvänd, liknar upprepa förutom att det inte finns något färgavbrott
- Gradientschema: Ändra färgerna på gradienten, val endast från en fördefinierad lista
-
Gps-tid: GPS-tid är ett viktigt attribut associerat med varje punkt i punktmolnet. Det ger information om tiden vid vilken laserpulsen avfyrades och tiden vid vilken returpulsen mottogs, vilket möjliggör en noggrann beräkning av avståndet och positionen för punkten. Dessutom kan GPS-tid användas för kvalitetskontroll och analysändamål. Genom att analysera fördelningen av GPS-tidsvärden över punktmolnet kan man identifiera områden med tidsmässiga avvikelser eller fel, vilket kan indikera problem med data eller LiDAR-systemet.
-
Indikatorer: Indikatorer är attribut kopplade till varje punkt i ett LiDAR-punktmoln som ger ytterligare information om punktens rumsliga egenskaper och relationer med andra punkter i molnet. De används ofta för att stödja avancerade analys- och bearbetningsuppgifter, såsom segmentering, klassificering och egenskapsutvinning. Det finns flera typer av indikatorer som kan användas vid LiDAR-punktmolnsbearbetning, inklusive:
- Normalvektor: Denna indikator representerar punktens orientering i förhållande till dess lokala grannskap. Den kan användas för att identifiera plana ytor eller för att uppskatta ytnormaler för ytrekonstruktion.
- Krökning: Denna indikator representerar den lokala krökningen av ytan vid punkten. Den kan användas för att identifiera skarpa kanter eller för att uppskatta radien av krökning för krökta ytor.
- Höjd över marken: Denna indikator representerar höjden av punkten över marken eller en referensyta. Den kan användas för terrängmodellering eller för att identifiera objekt som är ovanför eller under markytan.
- Relativ höjd: Denna indikator representerar höjden av punkten i förhållande till sina närliggande punkter. Den kan användas för att identifiera objekt som är högre eller lägre än sin omgivning.
- Densitet: Denna indikator representerar tätheten av punkter i det lokala grannskapet runt punkten. Den kan användas för att identifiera områden med hög eller låg punktdensitet, såsom vegetation eller byggnadsfasader.
-
Intensitet: Det representerar styrkan eller storleken av en signal som mottagits av en sensor eller enhet när punkten fångades. I vissa fall, är intensitet associerad med reflektionen av objektet vid den punkten. Till exempel, i ett LiDAR-punktmoln, representerar intensitetsvärdet mängden laserljus som reflekterades tillbaka till sensorn från objektet. I detta fall, skulle ett högre intensitetsvärde indikera en yta som reflekterar mer ljus, såsom en vit vägg, medan ett lägre värde skulle indikera en yta som reflekterar mindre ljus, såsom en svart bil. I andra fall, kan intensitet representera en annan fysisk kvantitet. Till exempel, i ett fotografiskt punktmoln, kan intensitet representera ljusstyrkan av en pixel i originalbilden som användes för att generera punktmolnet.
- Område: Från låg till hög intensitet
- Gamma: I princip exponeringen av punktmolnet, lägre gamma motsvarar högre exponering, högre gamma, lägre exponering, ger ett solnedgångsutseende.
- Ljushet: Punktmolnets ljushet, lägre ljushet gör det mörkare, högre ljushet gör det ljusare.
- Kontrast: Ändrar kontrasten av punktmolnet, lägre kontrast gör att punktmolnet blir grått, högre kontrast överexponerar standardfärgerna (röd, gul, grön, blå...)
-
Intensitetsgradient: Det är ett mått på förändringen i intensitet mellan närliggande punkter i ett punktmoln. Det representerar hastigheten med vilken intensiteten förändras med avseende på avstånd eller position. Intensitetsgradienten beräknas genom att ta gradienten av intensitetsvärdena i punktmolnet. Detta innebär att man beräknar de partiella derivatorna av intensitetsvärdena med avseende på x-, y-, och z-koordinaterna för varje punkt. Magnituden av gradientvektorn vid varje punkt representerar intensitetsgradientvärdet. Höga värden av intensitetsgradient indikerar skarpa kanter eller gränser, medan låga värden indikerar smidiga eller gradvisa övergångar.
- Område: Från låg till hög intensitet
- Gamma: I princip exponeringen av punktmolnet, lägre gamma motsvarar högre exponering, högre gamma, lägre exponering, ger ett solnedgångsutseende.
- Ljushet: Punktmolnets ljushet, lägre ljushet gör det mörkare, högre ljushet gör det ljusare.
- Kontrast: Ändrar kontrasten av punktmolnet, lägre kontrast gör att punktmolnet blir grått, högre kontrast överexponerar standardfärgerna (röd, gul, grön, blå...)
-
Detaljnivå: I LiDAR-punktmolnsbearbetning kan detaljnivå (LOD) referera till tätheten av punkter i punktmolnet, upplösningen av data, eller abstraktionsnivån som används för att representera data. Till exempel, ett punktmoln med hög detaljnivå skulle ha en hög täthet av punkter, en hög upplösning och en fin abstraktionsnivå. Omvänt skulle ett punktmoln med låg detaljnivå ha en lägre täthet av punkter, en lägre upplösning och en grov abstraktionsnivå.
-
Matcap: I LiDAR-punktmolnsbearbetning kan matcap användas för att lägga till visuella texturer och skuggningseffekter till 3D-modeller skapade från punktmoln. Genom att tillämpa en matcap-textur på en 3D-modell, är det möjligt att skapa en mer realistisk och visuellt tilltalande representation av scenen. Till exempel skulle en matcap-textur kunna användas för att simulera utseendet på en betongvägg eller trädbark, vilket tillför djup och realism till 3D-modellen.
- Välj texturen att tillämpa
-
Antal återkomster: Det representerar det totala antalet laserpulser som avfyrades och återvände till LiDAR-sensorn för att fånga den specifika punkten. Likt återkomstnummer, kan antalet återkomster variera från 1 till 5 eller mer, beroende på det använda LiDAR-systemet. Det totala antalet återkomster kan ge information om komplexiteten och strukturen av objektet eller scenen som scannas. Till exempel, en punkt med ett högt antal återkomster kan indikera ett objekt med flera lager eller komplex geometri, såsom en trädkrona eller en byggnadsfasad.
-
Punktkälla-ID: Den identifierar den specifika lasersensor som genererade punkten. Varje lasersensor i ett LiDAR-system har ett unikt ID eller nummer, och denna information registreras i punktmolnsdatan för att möjliggöra analys och kvalitetskontroll. Punktkälla-ID är särskilt användbart i situationer där flera LiDAR-sensorer används för att fånga en enda scen eller område. Genom att identifiera vilken sensor som genererade varje punkt är det möjligt att utföra kvalitetskontroller på data och säkerställa att data är korrekt justerade och registrerade mellan olika sensorer. Detta är särskilt viktigt i applikationer som skogsbruk, där flera LiDAR-sensorer kan användas för att fånga data från olika vinklar och perspektiv. På vår plattform används punktkälla-ID för att lagra källskannings-ID:t, detta gör det möjligt för användare att enkelt spåra vilken skanning varje punkt i punktmolnet härrör från. Till exempel, om flera skanningar utfördes av samma område med en 3D-laserskanner, kunde varje skanning tilldelas ett unikt skannings-ID och punktkälla-ID-attributet för varje punkt i punktmolnet kunde ställas in på motsvarande skannings-ID.
-
RGBA: Det används för att representera färgen på varje punkt i punktmolnet. De röda, gröna och blåa kanalerna används för att representera punktens färg, medan alfa-kanalen används för att representera punktens transparens eller opacitet. Användningen av färg i LiDAR punktmoln kan vara till hjälp för visualisering och tolkning, eftersom det kan ge ytterligare information om egenskaperna hos objekten och ytorna som representeras av punkterna. Till exempel, vid vegetationskartering, kan färgen på punkterna användas för att skilja mellan olika typer av vegetation eller för att identifiera områden med hög eller låg vegetationstäthet.
- Gamma: I princip exponeringen av punktmolnet, lägre gamma motsvarar högre exponering, högre gamma, lägre exponering, ger ett solnedgångsutseende.
- Ljushet: Punktmolnets ljushet, lägre ljushet gör det mörkare, högre ljushet gör det ljusare.
- Kontrast: Ändrar kontrasten av punktmolnet, lägre kontrast gör att punktmolnet blir grått, högre kontrast överexponerar standardfärgerna (röd, gul, grön, blå...)
-
Återkomstnummer: Det representerar antalet gånger en laserpuls avfyrades och återvände till LiDAR-sensorn för att fånga den specifika punkten. Likt antalet återkomster, är återkomstnummer oftast ett värde mellan 1 och 5, med 1 som indikerar den första återkomsten och 5 som indikerar den femte återkomsten. Den första återkomsten representerar laserpulsen som reflekteras från objektets överyta, medan efterföljande återkomster kan representera reflektioner från lägre ytor eller flera reflektioner inom objektet.
-
Skanningsvinkelrang: Det representerar vinkeln mellan laserstrålen och skannarens referenslinje när laserpulsen avfyrades för att fånga den specifika punkten. Skanningsvinkelrang ger information om vinkeln vid vilken punktfångsten skedde, med ett värde på 0 som indikerar skannarens referenslinje och positiva eller negativa värden som indikerar avvikelsen från referenslinjen. Vid byggnadsutvinning kan skanningsvinkelrang användas för att identifiera byggnadsfasader och takstrukturer baserat på deras orientering i förhållande till skannarens referenslinje. Vid vägytanalyser kan skanningsvinkelrang användas för att upptäcka ytdefekter eller oregelbundenheter baserat på skannarens vinkel i relation till vägytan.
-
Användardata: Det gör det möjligt för användare att lägga till ytterligare information till punktmolnet utöver de standardattribut som XYZ-koordinater, intensitet och återkomstnummer. Användardata kan användas för att lagra en mängd olika informationsbitar, såsom RGB-färgvärden, klassificeringsetiketter eller metadata kopplade till punkten. Till exempel kan användardata användas för att indikera om en punkt är en del av en byggnad, ett träd eller en väg, eller för att lagra information om punktmätningens kvalitet eller dess osäkerhet. Användningen av användardata beror på användarens specifika behov och applikationer. Detta kan användas för en rad olika uppgifter, såsom objektigenkänning, klassificering, segmentering och kartläggning. Genom att lägga till anpassad användardata till ett punktmoln är det möjligt att extrahera mer meningsfull information och utföra mer avancerade analys- och bearbetningsuppgifter.
Om ditt punktmoln inte visas korrekt vid första anblicken, försök med RGBA- eller intensitetsattribut, eftersom dessa är de mest använda.
Lär dig om punktmolnens egenskaper i denna artikel.
Om du stöter på några problem finns vårt supportteam här för att hjälpa till. Lycka till med utforskandet!