Добавить 360° изображения в проект
Платформа совместима с 360° изображениями. Если у вас есть проект ReCap и в нём имеются 360° изображения, просто заархивируйте проект ReCap и отправьте его; 360° изображения будут сохранены.
В некоторых случаях, если у вас есть файл e57, в зависимости от инструмента, использованного для экспорта файла e57, 360° изображения могут быть включены внутрь. В этом случае платформа сохраняет 360° изображения (например, Cyclone Register 360 сохраняет изображения, если файл e57 структурирован, а NavVis и Geoslam также сохраняют изображения в файле e57).
В противном случае вы сможете загрузить изображения отдельно — после того как ваш облачный набор точек будет отправлен и активирован, повторно откройте страницу отправки и перетащите .zip файл, содержащий ваши изображения.
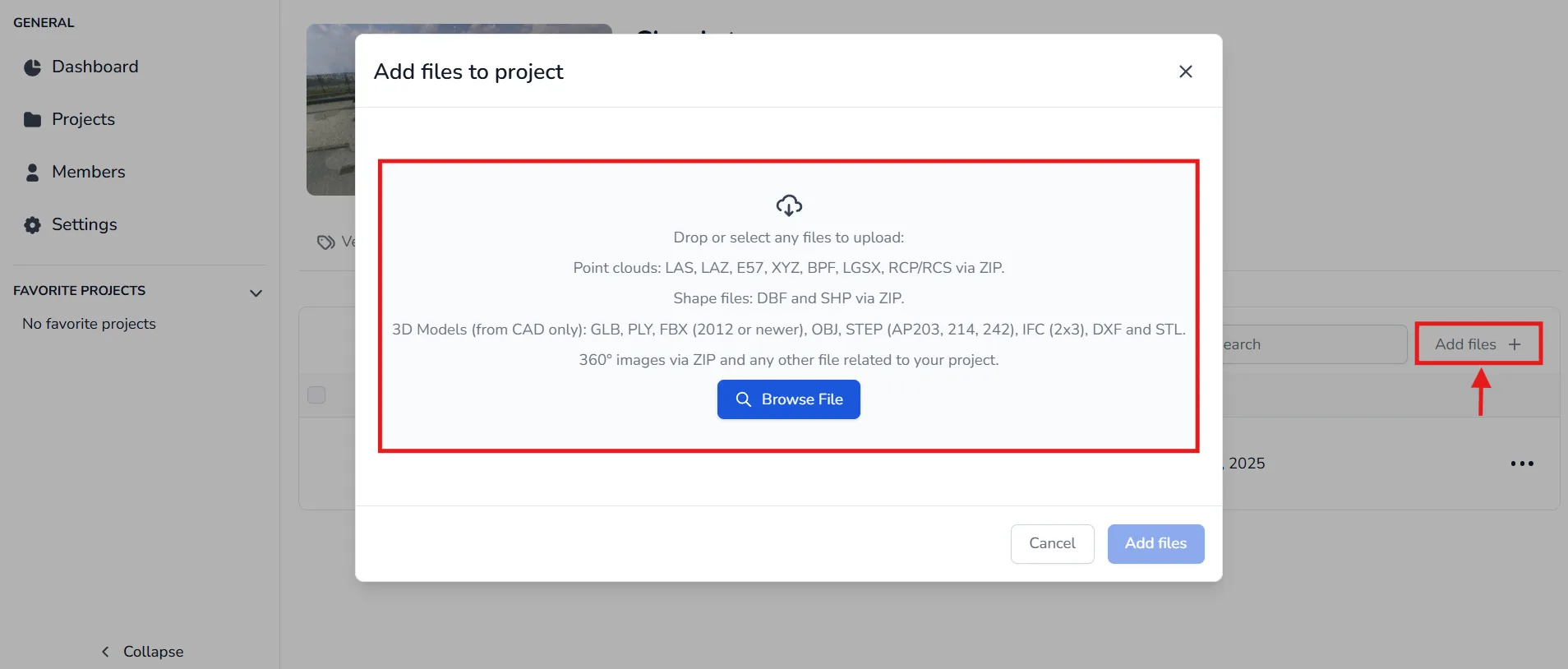
Узнайте о различных .zip файлах в зависимости от используемого сканера ниже. Чтобы загрузить изображения, перетащите ваш .zip файл, платформа автоматически распознает тип изображений, который вы загрузили.
Для стационарных сканеров нет необходимости в CSV-файле с информацией о позиционировании, поскольку данные получены с наземного сканирования и, следовательно, структурированы, нам остается только связать изображения с их станцией. Всё, что нужно — это TXT-файл, указывающий платформе, из какого ПО поступают изображения. Изображения и TXT-файл должны быть заархивированы в один файл, который будет загружен на платформу.
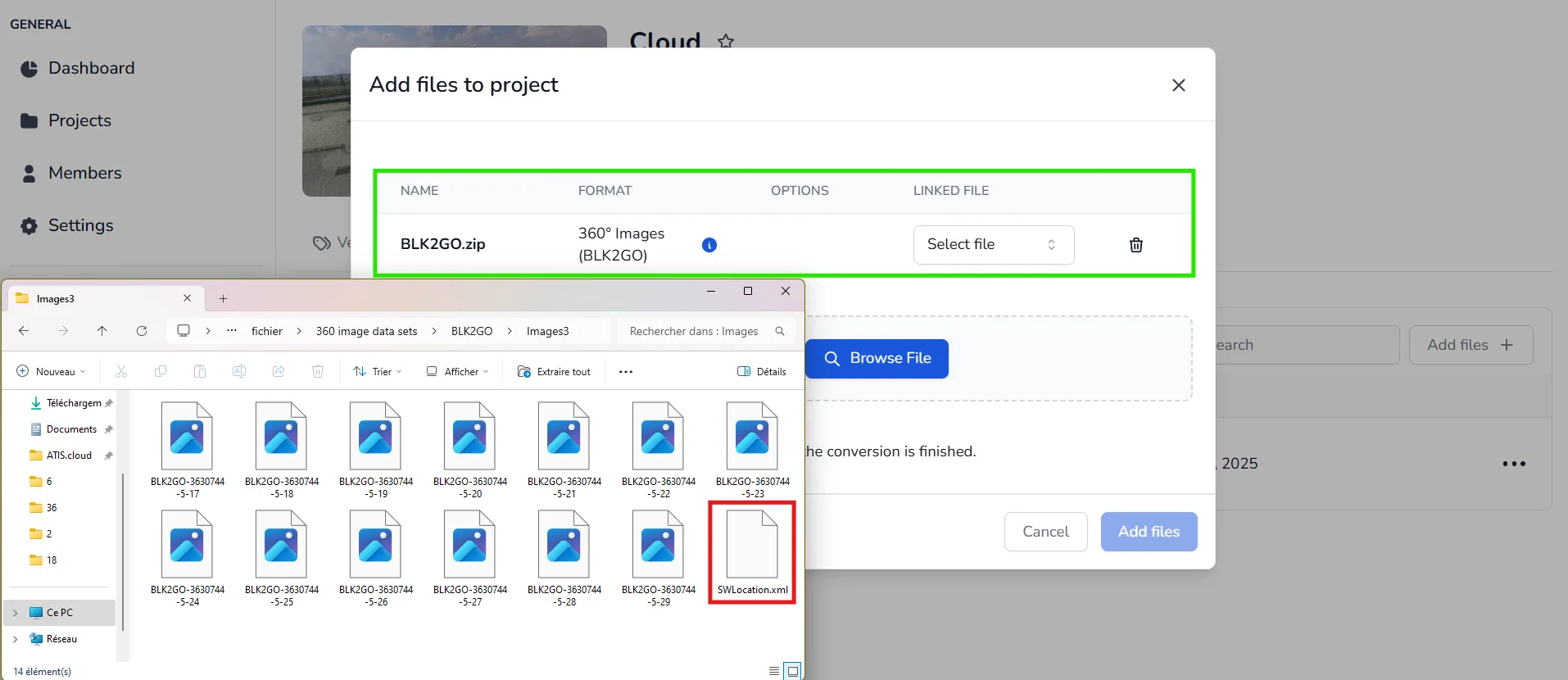
- Leica BLK2GO
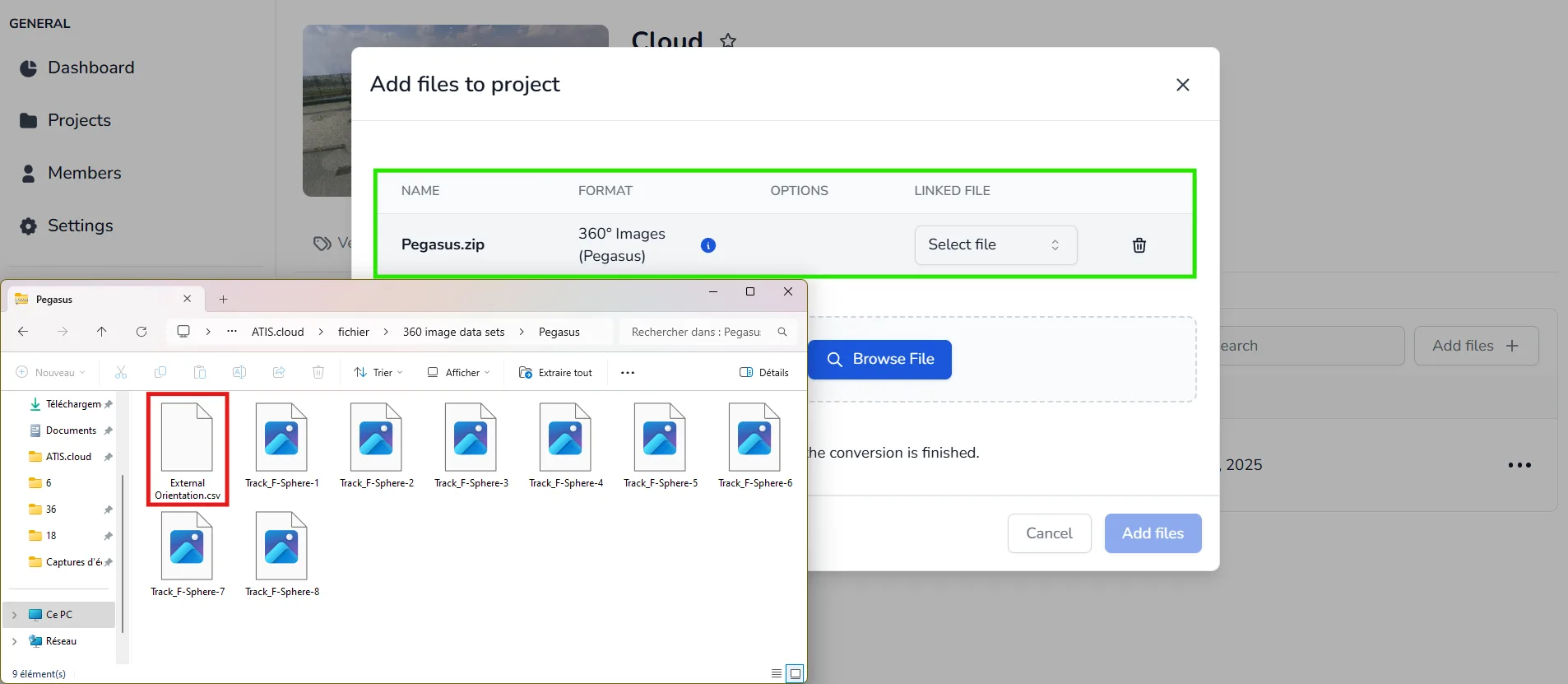
- Leica Pegasus
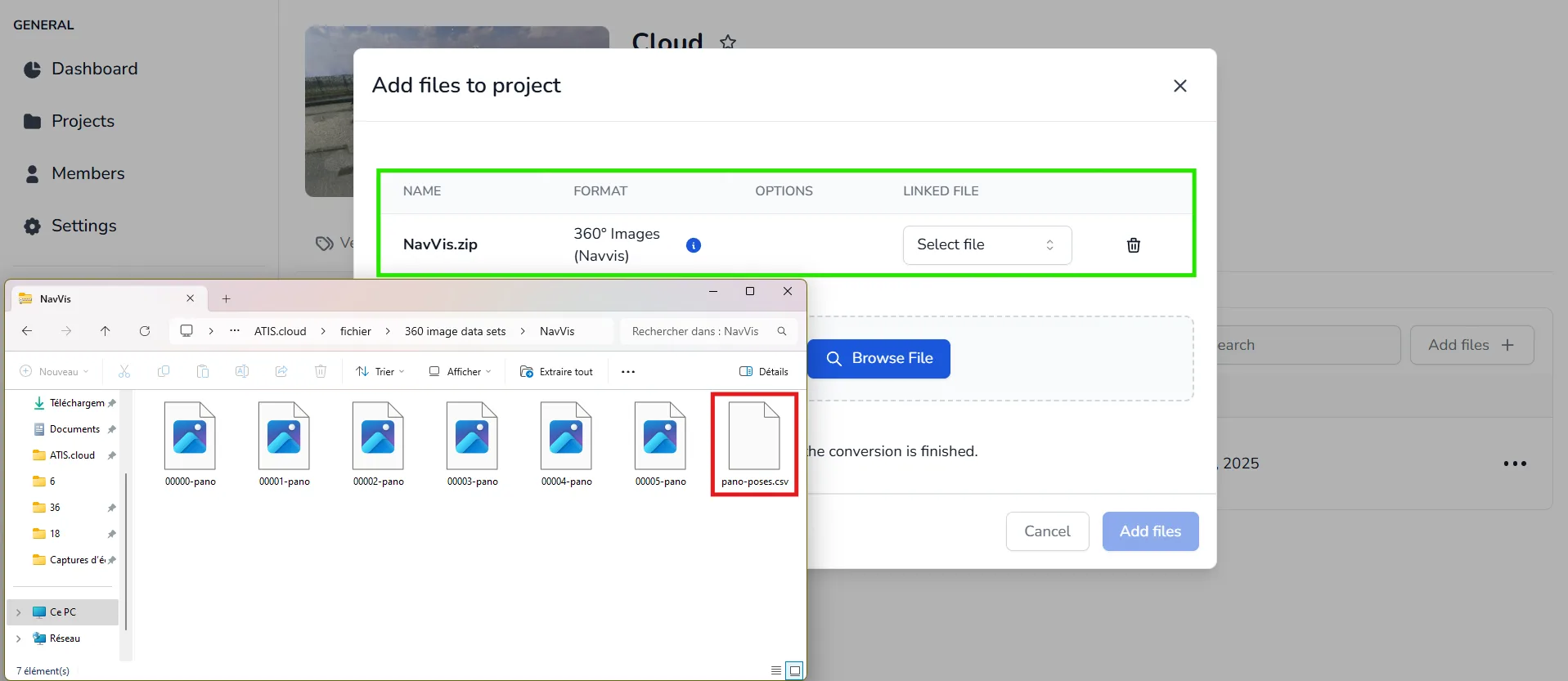
- NavVis
- FARO
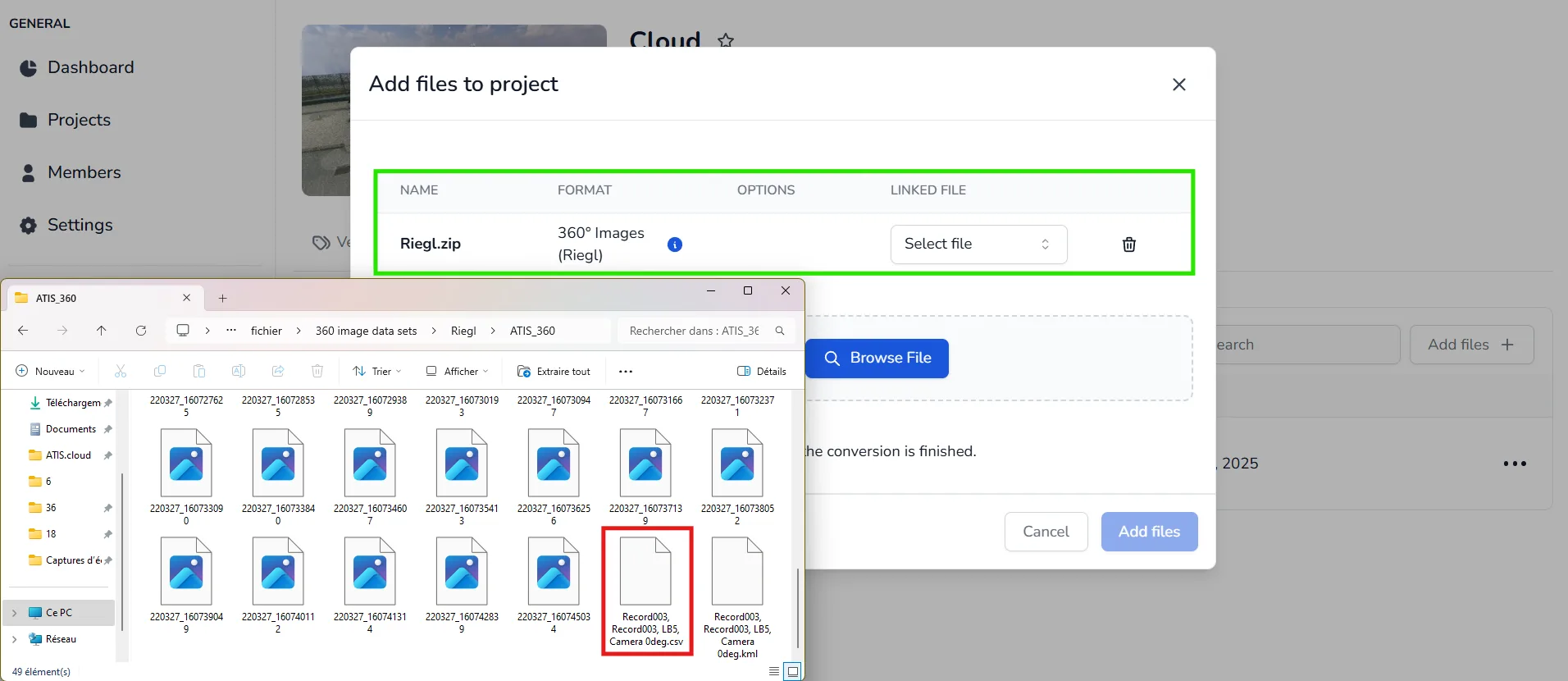
- Riegl
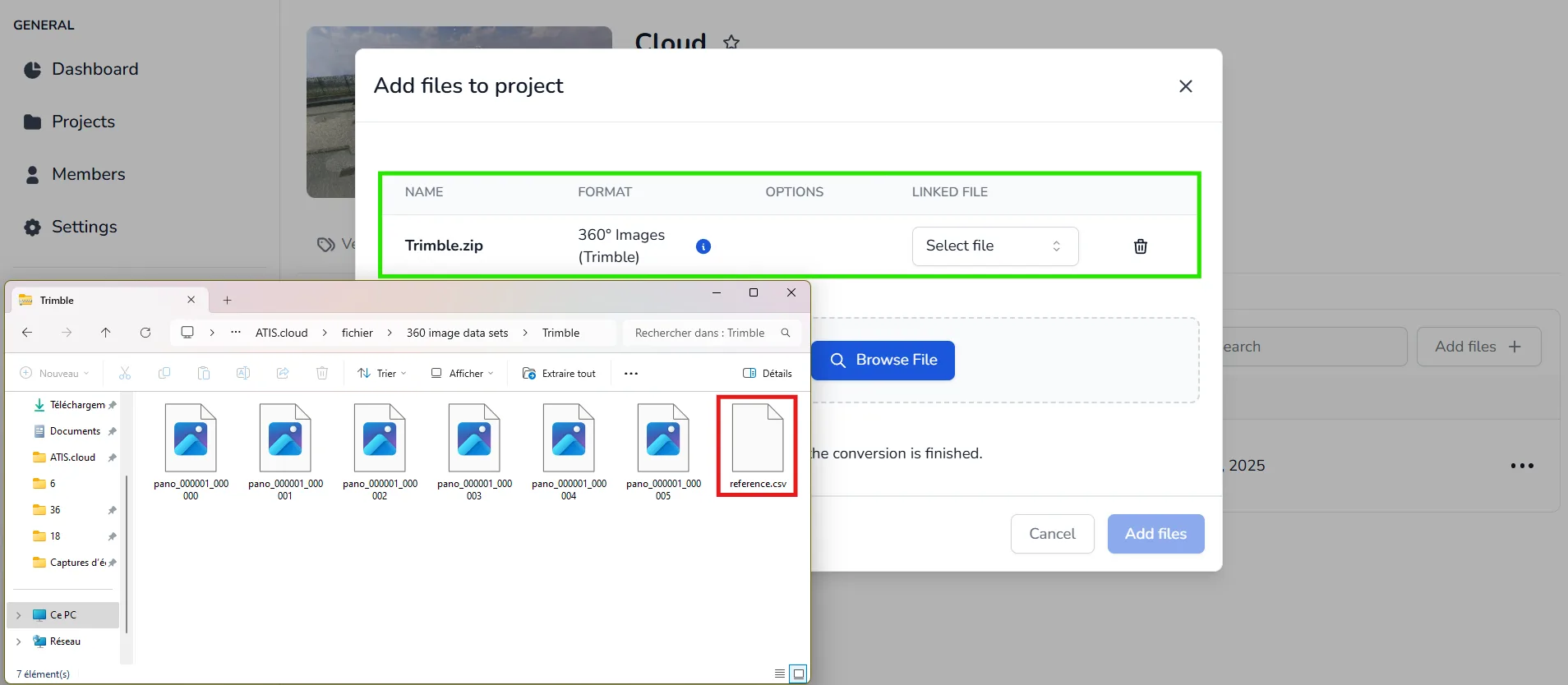
- Trimble MX9
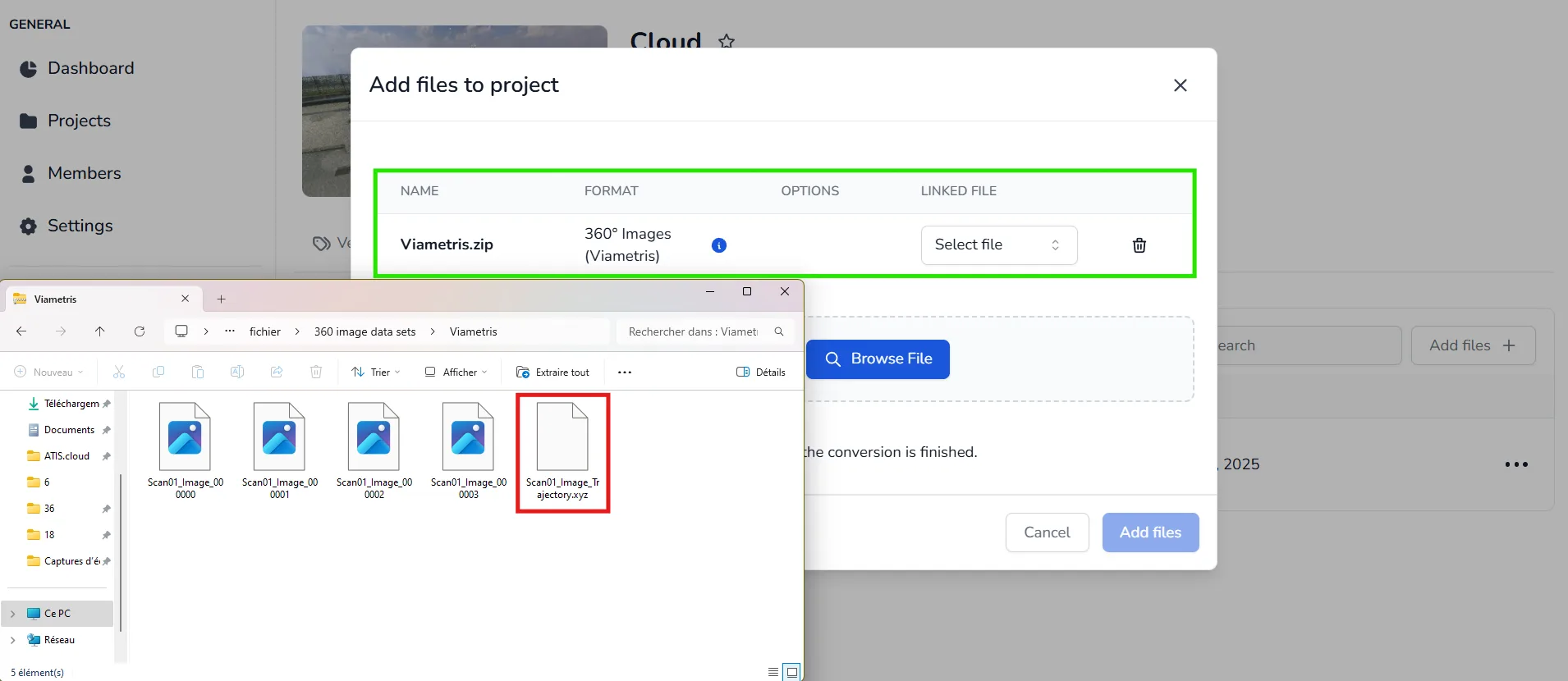
- Viametris
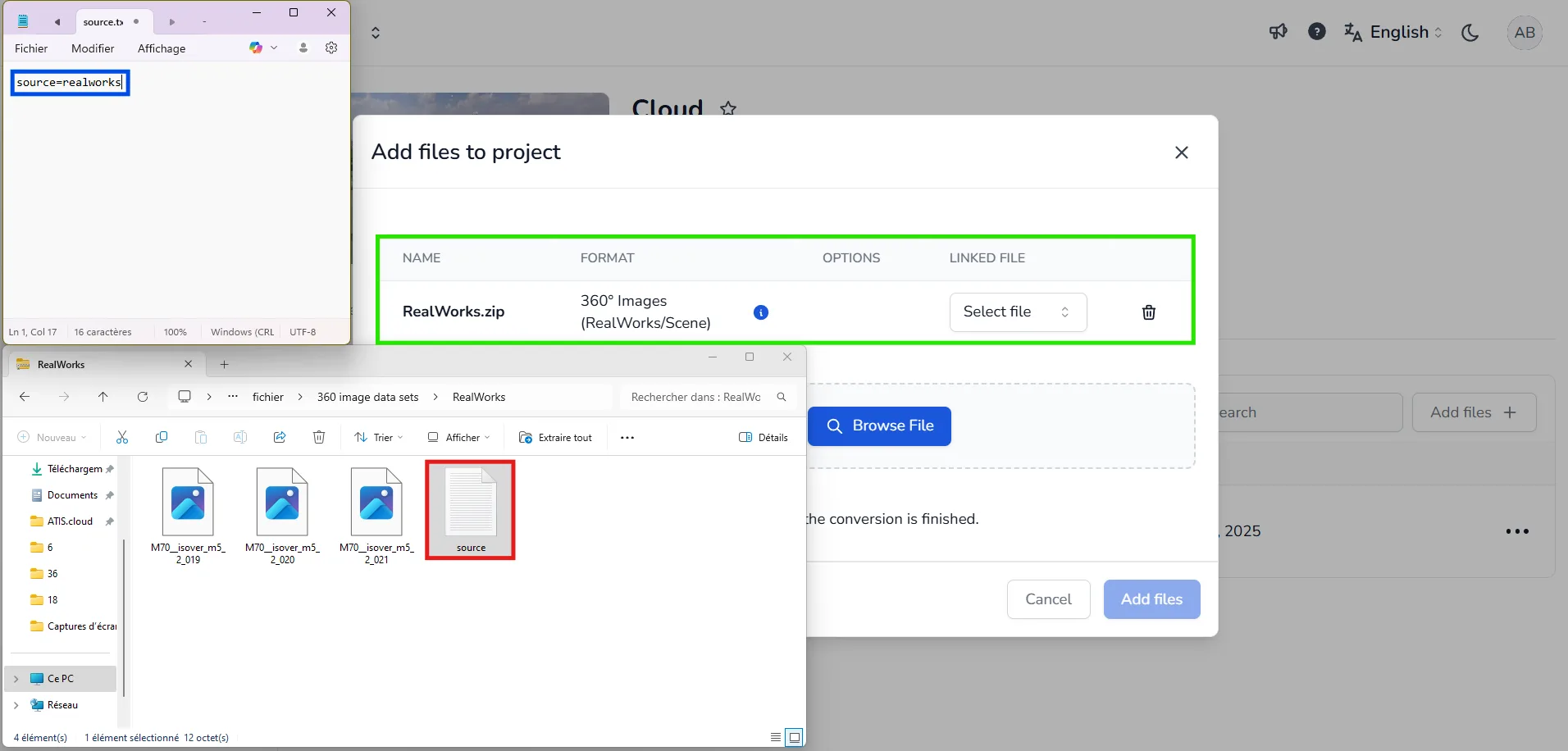
- Realworks
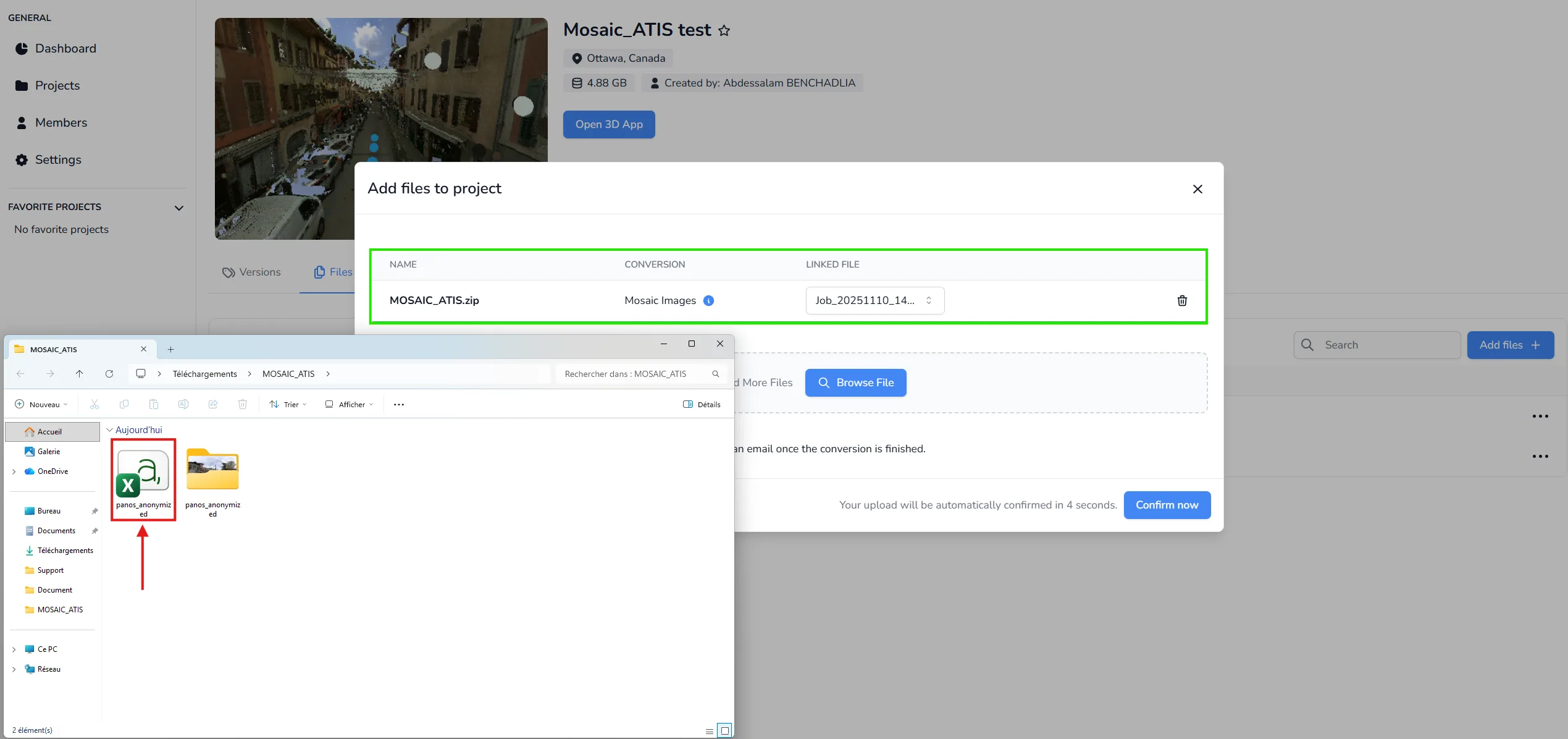
- Mosaic
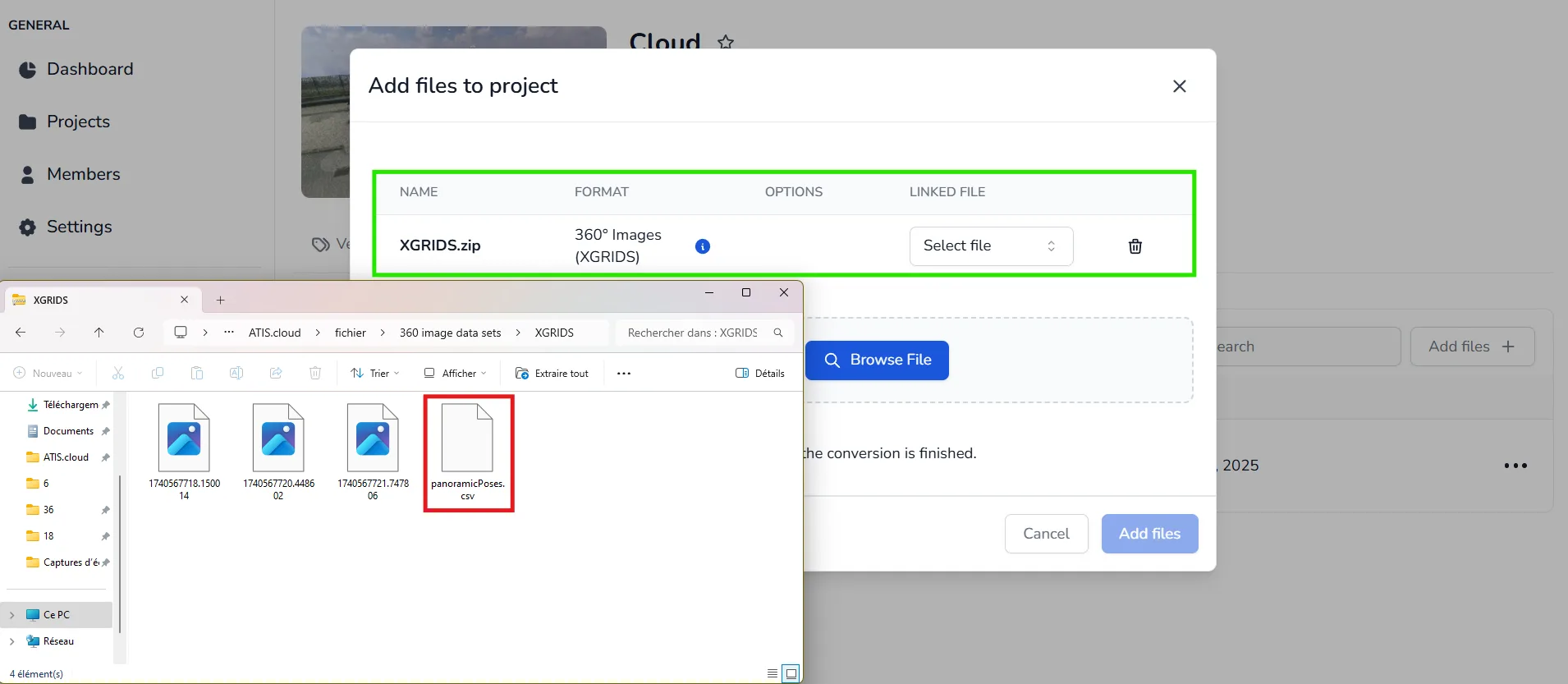
- XGRIDS
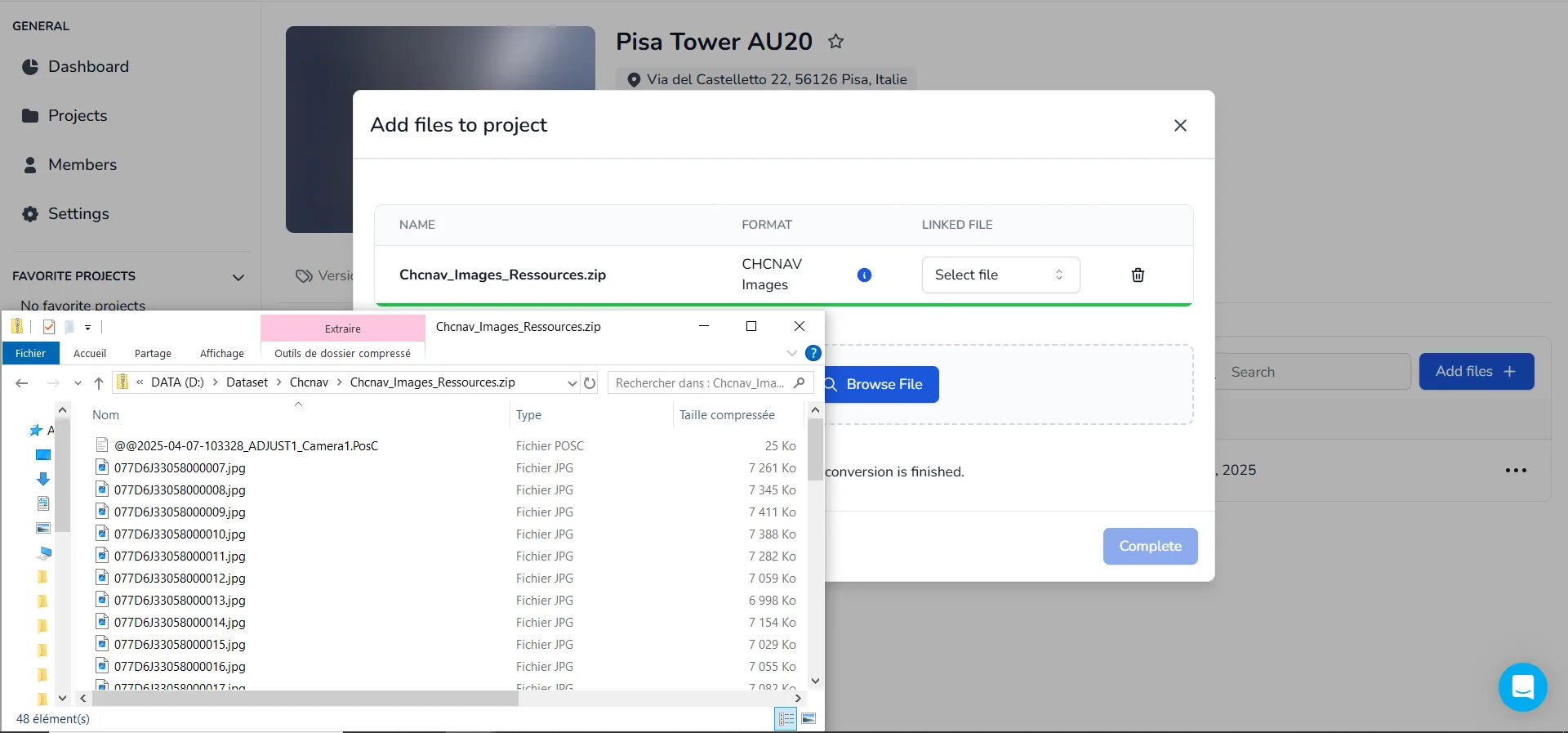
- CHCNAV
- 📂Используйте XML-файл вместе с изображениями и заархивируйте всё вместе.📥
- В качестве альтернативы можно импортировать .LGSx файл, который включает ваши 360° изображения, так как этот тип файла поддерживается.
- 📂Используйте файл "External Orientation.csv" вместе с изображениями и заархивируйте всё вместе.📥
- В качестве альтернативы можно импортировать .LGSx файл, который включает ваши 360° изображения, так как этот тип файла поддерживается.
- 📂Используйте CSV-файл вместе с изображениями и заархивируйте всё вместе.📥
- В качестве альтернативы можно импортировать E57 файл от NavVis, который включает ваши 360° изображения. Вы можете обратиться к этой специальной статье
- 📂Как только ваш ZIP-архив будет готов, загрузите его в ваш проект. Система автоматически определит, исходит ли он из FARO Scene. Пожалуйста, обратитесь к примеру на изображении, чтобы проверить наличие требуемого
.txtфайла внутри ZIP, который необходим для корректного распознавания и обработки..📥 - В качестве альтернативы можно импортировать E57 файл из Faro Scene, который включает ваши 360° изображения. Вы можете обратиться к этой специальной статье
📂Используйте CSV-файл вместе с изображениями и заархивируйте всё вместе.📥
📂Используйте CSV-файл вместе с изображениями и заархивируйте всё вместе.📥
-
📂Используйте файл XYZ вместе с изображениями и заархивируйте всё вместе.📥
⚠️ Правила именования изображений : Все 360° изображения должны соответствовать требуемому формату имен, например: image_000000.jpg, image_000001.jpg, image_000002.jpg и т.д., с непрерывной последовательной нумерацией.
-
В качестве альтернативы вы можете напрямую импортировать файл E57, который включает ваши 360° изображения.
Пожалуйста, обратите внимание, что в последней версии ПО PPiMMS вы можете выбрать ориентацию траектории MultiCams. Платформа в настоящее время совместима с опцией "y front, x right, z up (legacy)". Убедитесь, что эта опция выбрана перед экспортом изображений из PPiMMS .

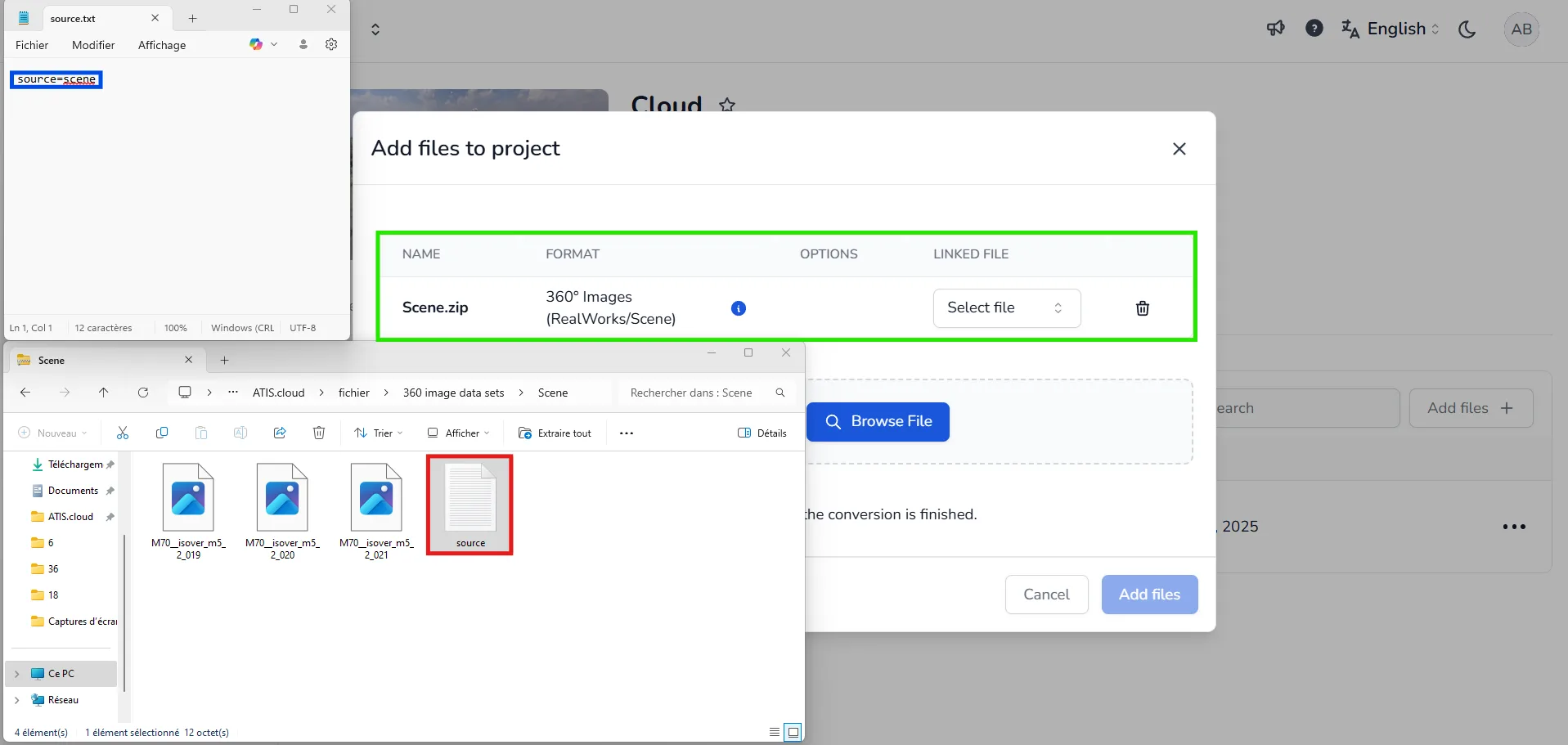
📂Как только ваш ZIP-архив будет готов, загрузите его в ваш проект. Система автоматически определит, исходит ли он из Trimble Realworks. Пожалуйста, обратитесь к примеру на изображении, чтобы проверить наличие требуемого .txt файла в ZIP, который необходим для корректного распознавания и обработки.📥
📂Используйте CSV-файл вместе с изображениями и заархивируйте всё вместе.📥
⬇️ Пожалуйста, скачать шаблон CSV-файла для подготовки импорта изображений Mosaic.
📂Используйте файл "panoramicPoses.csv" вместе с изображениями и заархивируйте всё вместе.📥
📂Используйте PosC файл вместе с изображениями и заархивируйте всё вместе. Файл PosC имеет формат "@@yy-mm-dd-id_ADJUST1_Camera1.PosC". Система автоматически определит, исходит ли он из CHCNAV.📥 Вы можете обратиться к этой специальной статье.
В случае проблем или затруднений не стесняйтесь обращаться к команде платформы.