Атрибуты облака точек
Чтобы получить доступ к атрибутам облака точек, откройте меню проекта и выберите ваше облако точек. Нажмите на вкладку Атрибуты, ниже вы найдете выпадающее меню, перечисляющее все возможные атрибуты, выберите тот, который вы хотите использовать. Ниже вы найдете список всех возможных атрибутов и их функции.
-
Анализ: Работает только с облаками точек для анализа, для получения дополнительной информации об анализе, прочитайте эту статью.
- Имя: Измените название облака точек
- Видеть позицию
- Видеть вращение
- Видеть масштаб
- Удалить анализ (будет удален только из 3D-приложения, можно будет загрузить позже, если это серверный анализ)
-
Классификация: Работает только с совместимыми облаками точек. Цель классификации состоит в том, чтобы сгруппировать похожие точки в значимые категории, такие как грунт, растительность, здания и другие объекты.
- Показать / скрыть все: отображает или скрывает каждую категорию
- Одна строка на категорию, нажмите на строку, чтобы показать / скрыть её, нажмите на цвет, чтобы изменить его
-
Цвет: Окрашивает все облачо точек одним цветом
- Выберите цвет с помощью палитры
- Используйте шестнадцатеричный код, чтобы выбрать цвет
- Выберите один из цветов из списка по умолчанию
-
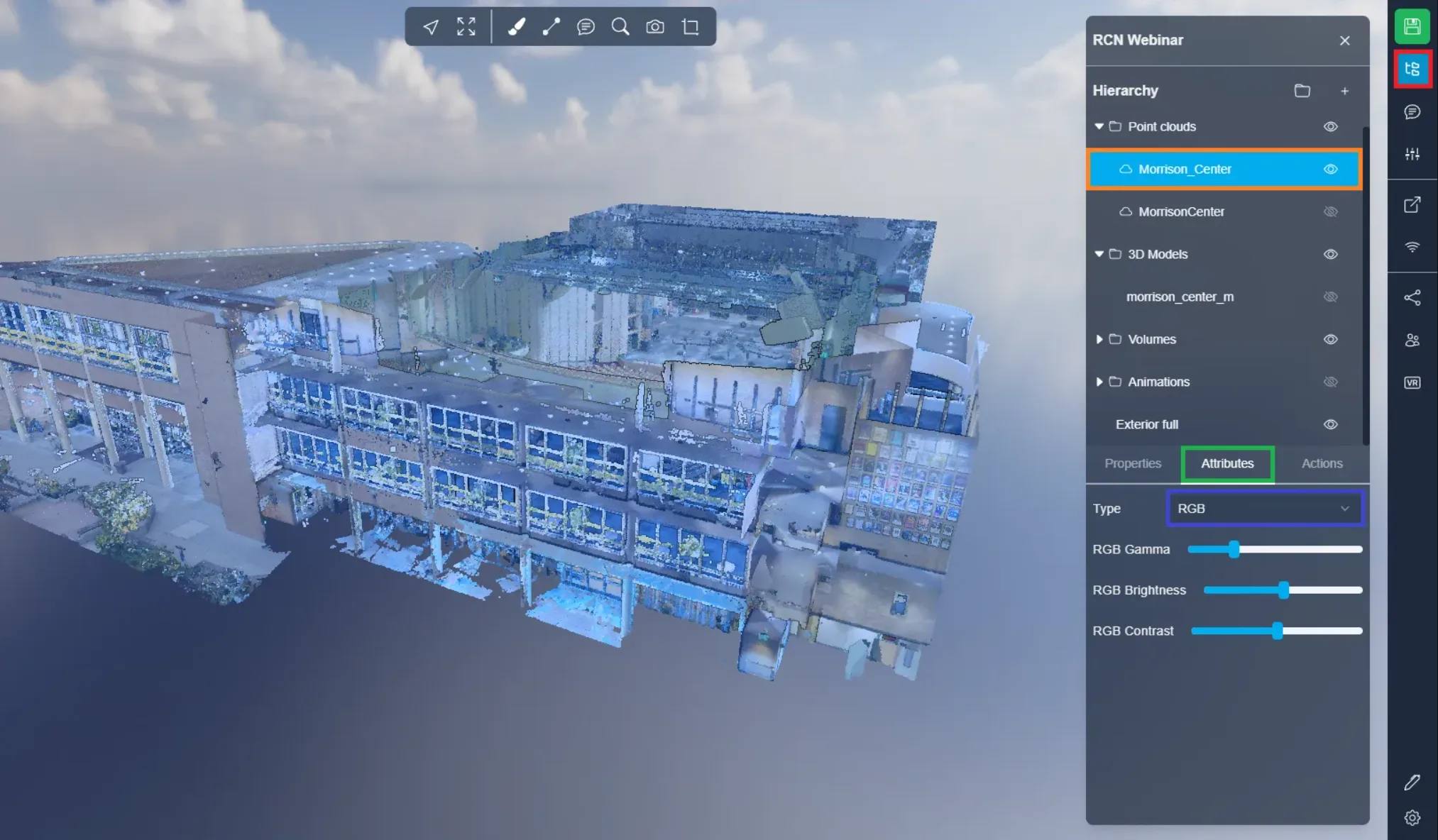
Композит: Используйте, если хотите использовать несколько опций одновременно, перемещайте ползунки, чтобы увеличить/уменьшить их использование.
- RGBA: Окрашенное облако точек
- Гамма: В основном это экспозиция облака точек, меньшая гамма равна более высокой экспозиции, большая гамма, меньшая экспозиция, придаёт эффект заката
- Яркость: Яркость облака точек, меньшая яркость сделает его темнее, большая - светлее.
- Контраст: Изменяет контраст облака точек, меньший контраст делает облако точек серым, больший контраст делает стандартные цвета (красный, жёлтый, зелёный, синий…) пересвеченными
- Интенсивность: Сила или величина сигнала
- Диапазон: От низкой интенсивности до высокой
- Гамма: В основном это экспозиция облака точек, меньшая гамма равна более высокой экспозиции, большая гамма, меньшая экспозиция, придаёт эффект заката
- Яркость: Яркость облака точек, меньшая яркость сделает его темнее, большая - светлее.
- Контраст: Изменяет контраст облака точек, меньший контраст делает облако точек серым, больший контраст делает стандартные цвета (красный, жёлтый, зелёный, синий…) пересвеченными
- Высота: Высота или вертикальное положение каждой точки
- Диапазон высоты: установите, где градиент начинается и заканчивается по высоте
- Режим градиента
- Зажим: стандартный градиент, выходящий за пределы диапазона, сохраняет конечный цвет края
- Повтор: когда градиент заканчивается, начинается снова с оригинального цвета
- Зеркальный повтор: когда градиент заканчивается, помещает новый градиент инвертированным, подобно повтору, но без цветовых разрывов
- Схема градиента: изменяет цвета градиента, выбирается только из предопределённого списка
- Анализ: Только если доступно для этого облака точек, сравнение модели и облака точек
- Классификация: Только если доступно для этого облака точек, разделяет различные типы объектов (грунт, растительность, здания…)
- Номер возврата: количество импульсов, необходимых для получения этой точки
- ID источника точки: сгруппировано по ID сканирования
- RGBA: Окрашенное облако точек
-
Высота: Представляет собой высоту или вертикальное положение каждой точки. Данные о высоте важны во многих приложениях облаков точек, таких как топографическое картирование, моделирование наводнений, планирование городов и проектирование инфраструктуры. Анализируя данные о высоте, можно создавать точные и детализированные цифровые модели высот (DEM), которые могут быть использованы для широкого спектра геопространственного анализа и визуализации.
- Диапазон высоты: установите, где градиент начинается и заканчивается по высоте
- Режим градиента
- Зажим: стандартный градиент, выходящий за пределы диапазона, сохраняет конечный цвет края
- Повтор: когда градиент заканчивается, начинается снова с оригинального цвета
- Зеркальный повтор: когда градиент заканчивается, помещает новый градиент инвертированным, подобно повтору, но без цветовых разрывов
- Схема градиента: изменяет цвета градиента, выбирается только из предопределённого списка
-
GPS-время: Время GPS - это важный атрибут, связанный с каждой точкой в облаке точек. Оно предоставляет информацию о времени, когда лазерный импульс был отправлен, и времени, когда возвратный импульс был получен, позволяя точно вычислить диапазон и положение точки. Кроме того, GPS-время может быть использовано для контроля качества и анализа. Анализируя распределение значений GPS-времени по облаку точек, можно выявить области с временными аномалиями или ошибками, которые могут указывать на проблемы с данными или системой LiDAR.
-
Индексы: Индексы - это атрибуты, связанные с каждой точкой в облаке точек LiDAR, которые обеспечивают дополнительную информацию о пространственных свойствах точки и отношениях с другими точками в облаке. Они часто используются для поддержки передовых задач анализа и обработки, таких как сегментация, классификация и извлечение признаков. Существует несколько типов индексов, которые могут использоваться в обработке облаков точек LiDAR, включая:
- Нормальный вектор: Этот индекс представляет ориентацию точки относительно её локального окружения. Он может использоваться для идентификации плоских поверхностей или для оценки нормалей поверхности для реконструкции поверхности.
- Кривизна: Этот индекс представляет локальную кривизну поверхности в точке. Он может использоваться для идентификации острых краёв или для оценки радиуса кривизны для искривлённых поверхностей.
- Высота над землёй: Этот индекс представляет высоту точки над землёй или опорной поверхностью. Он может использоваться для моделирования местности или для идентификации объектов, находящихся выше или ниже поверхности земли.
- Относительная высота: Этот индекс представляет высоту точки относительно её соседних точек. Он может использоваться для идентификации объектов, которые выше или ниже своего окружения.
- Плотность: Этот индекс представляет плотность точек в локальном окружении вокруг точки. Он может использоваться для идентификации областей с высокой или низкой плотностью точек, таких как растительность или фасады зданий.
-
Интенсивность: Представляет силу или величину сигнала, полученного датчиком или устройством при захвате точки. В некоторых случаях интенсивность связана с отражательной способностью объекта в этой точке. Например, в облаке точек LiDAR значение интенсивности представляет количество лазерного света, отражённого обратно на датчик от объекта. В этом случае более высокое значение интенсивности указывает на поверхность, которая отражает больше света, например, белую стену, в то время как более низкое значение интенсивности указывает на поверхность, которая отражает меньше света, например, чёрную машину. В других случаях интенсивность может представлять другую физическую величину. Например, в фотографическом облаке точек интенсивность может представлять яркость пикселя в оригинальном изображении, использовавшемся для создания облака точек.
- Диапазон: От низкой интенсивности до высокой
- Гамма: В основном это экспозиция облака точек, меньшая гамма равна более высокой экспозиции, большая гамма, меньшая экспозиция, придаёт эффект заката
- Яркость: Яркость облака точек, меньшая яркость сделает его темнее, большая - светлее.
- Контраст: Изменяет контраст облака точек, меньший контраст делает облако точек серым, больший контраст делает стандартные цвета (красный, жёлтый, зелёный, синий…) пересвеченными
-
Градиент интенсивности: Это мера изменения интенсивности между соседними точками в облаке точек. Он представляет скорость, с которой интенсивность изменяется относительно расстояния или позиции. Градиент интенсивности рассчитывается путём нахождения градиента значений интенсивности в облаке точек. Это включает в себя расчёт частных производных значений интенсивности относительно координат x, y и z каждой точки. Величина вектора градиента в каждой точке представляет значение градиента интенсивности. Высокие значения градиента интенсивности указывают на острые края или границы, в то время как низкие значения указывают на плавные или постепенные изменения.
- Диапазон: От низкой интенсивности до высокой
- Гамма: В основном это экспозиция облака точек, меньшая гамма равна более высокой экспозиции, большая гамма, меньшая экспозиция, придаёт эффект заката
- Яркость: Яркость облака точек, меньшая яркость сделает его темнее, большая - светлее.
- Контраст: Изменяет контраст облака точек, меньший контраст делает облако точек серым, больший контраст делает стандартные цвета (красный, жёлтый, зелёный, синий…) пересвеченными
-
Уровень детализации: В обработке облаков точек LiDAR уровень детализации (LOD) может относиться к плотности точек в облаке, разрешению данных или уровню абстракции, используемому для представления данных. Например, облако точек с высоким уровнем детализации будет иметь высокую плотность точек, высокое разрешение и детальный уровень абстракции. Наоборот, облако точек с низким уровнем детализации будет иметь меньшую плотность точек, более низкое разрешение и грубый уровень абстракции.
-
Маткап: В обработке облаков точек LiDAR маткап может использоваться для добавления визуальных текстур и эффектов затенения к 3D-моделям, созданным из облаков точек. Применяя текстуру маткап к 3D-модели, можно создать более реалистичное и визуально привлекательное представление сцены. Например, текстура маткап может быть использована для имитации внешнего вида бетонной стены или коры дерева, добавляя глубину и реализм к 3D-модели.
- Выберите текстуру для применения
-
Количество возвратов: Представляет общее количество лазерных импульсов, которые были отправлены и возвращены на датчик LiDAR для захвата данной точки. Аналогично номеру возврата, количество возвратов может варьироваться от 1 до 5 или более, в зависимости от используемой системы LiDAR. Общее количество возвратов может предоставить информацию о сложности и структуре объекта или сцены, которая сканируется. Например, точка с высоким числом возвратов может указывать на объект с множеством слоёв или сложной геометрией, таких как крона дерева или фасад здания.
-
ID источника точки: Идентифицирует конкретный лазерный датчик, который сгенерировал точку. Каждый лазерный датчик в системе LiDAR имеет уникальный ID или номер, и эта информация записывается в данных облака точек, чтобы обеспечивать анализ и контроль качества. ID источника точки особенно полезен в случаях, когда для захвата одной сцены или области используется несколько датчиков LiDAR. Посредством идентификации, который датчик сгенерировал каждую точку, можно провести проверки качества данных и удостовериться, что данные правильно выровнены и зарегистрированы между разными датчиками. Это особенно важно в таких приложениях как лесное хозяйство, где несколько датчиков LiDAR могут использоваться для получения данных с разных углов и перспектив. На нашей платформе ID источника точки используется для хранения ID источника сканирования, что позволяет пользователям легко отслеживать, из какого сканирования происходит каждая точка в облаке точек. Например, если несколько сканирований были выполнены одной области с использованием 3D-лазерного сканера, каждое сканирование может получить уникальный ID сканирования, а атрибут ID источника точки для каждой точки в облаке может быть установлен в соответствующий ID сканирования.
-
RGBA: Используется для представления цвета каждой точки в облаке точек. Каналы красного, зелёного и синего цветов используются для представления цвета точки, в то время как альфа-канал используется для представления прозрачности или непрозрачности точки. Использование цвета в облаках точек LiDAR может быть полезно для целей визуализации и интерпретации, так как предоставляет дополнительную информацию о свойствах объектов и поверхностей, представленных точками. Например, в картировании растительности цвет точек можно использовать для различения различных типов растительности или для идентификации областей с высокой или низкой плотностью растительности.
- Гамма: В основном это экспозиция облака точек, меньшая гамма равна более высокой экспозиции, большая гамма, меньшая экспозиция, придаёт эффект заката
- Яркость: Яркость облака точек, меньшая яркость сделает его темнее, большая - светлее.
- Контраст: Изменяет контраст облака точек, меньший контраст делает облако точек серым, больший контраст делает стандартные цвета (красный, жёлтый, зелёный, синий…) пересвеченными
-
Номер возврата: Представляет количество раз, когда лазерный импульс был отправлен и возвращён на датчик LiDAR для захвата данной точки. Подобно числу возвратов, номер возврата обычно является значением от 1 до 5, где 1 указывает на первый возврат, а 5 - на пятый. Первый возврат представляет собой лазерный импульс, отражённый от верхней поверхности объекта, в то время как последующие возвраты могут представлять отражения от нижних поверхностей или множественные отражения внутри объекта.
-
Ранг угла сканирования: Представляет угол между лазерным лучом и контрольной линией сканера при отправке лазерного импульса для захвата данной точки. Ранг угла сканирования предоставляет информацию об угле, под которым была захвачена точка, где значение 0 указывает на контрольную линию сканера, а положительные или отрицательные значения указывают на отклонение от контрольной линии. В извлечении объектов ранг угла сканирования может использоваться для идентификации фасадов зданий и конструкций крыш на основе их ориентации относительно контрольной линии сканера. В анализе дорожных покрытий ранг угла сканирования может использоваться для обнаружения дефектов поверхности или неровностей на основе угла сканера по отношению к дорожной поверхности.
-
Пользовательские данные: Позволяет пользователям добавлять дополнительную информацию в облако точек вдобавок к стандартным атрибутам, таким как координаты XYZ, интенсивность и номер возврата. Пользовательские данные могут использоваться для хранения широкого спектра информации, такой как значения цвета RGB, классификационные метки или метаданные, связанные с точкой. Например, пользовательские данные могли бы использоваться для указания принадлежности точки к зданию, дереву или дороге, или же для хранения информации о качестве измерения точки или его неопределённости. Использование пользовательских данных зависит от специфических потребностей и приложений пользователя. Они могут быть использованы для различных задач, таких как распознавание объектов, классификация, сегментация и картирование. Путём добавления индивидуализированных пользовательских данных в облако точек можно извлечь более значимую информацию и выполнять более сложные задачи анализа и обработки.
Если ваше облако точек изначально не отображается правильным образом, попробуйте использовать атрибуты RGBA или интенсивности, так как они самые распространённые.
Узнайте о свойствах облака точек в этой статье.
Если у вас возникнут какие-либо проблемы, наша команда поддержки готова помочь. Приятного исследования!