Atributos da Nuvem de Pontos
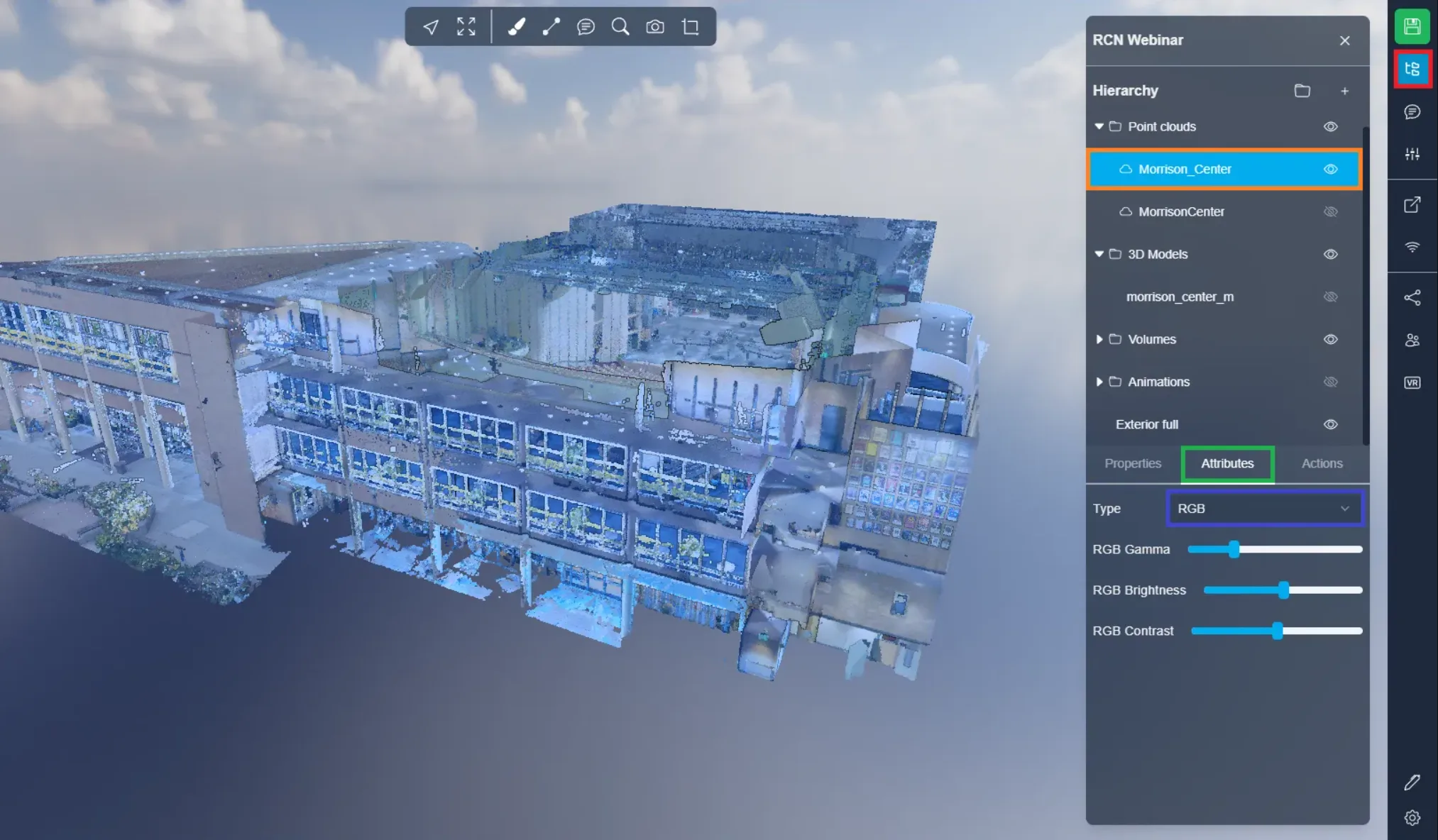
Para acessar os atributos de um nuvem de pontos, abra o menu do projeto e selecione sua nuvem de pontos. Clique na guia Atributos, abaixo você encontrará um menu suspenso listando todos os atributos possíveis, selecione o que deseja usar. Você encontrará uma lista de todos os atributos possíveis e o que cada um faz, abaixo.
-
Análise: Funciona apenas com nuvens de pontos de análise, para mais informações sobre análise, confira este artigo.
- Nome: Alterar o nome da nuvem de pontos
- Ver a posição
- Ver a rotação
- Ver a escala
- Excluir a análise (será excluída apenas da Aplicação 3D, pode ser recarregada mais tarde se for uma análise do lado do servidor)
-
Classificação: Funciona apenas com nuvens de pontos compatíveis. O objetivo da classificação é agrupar pontos semelhantes em categorias significativas, como solo, vegetação, edifícios e outros objetos.
- Mostrar / ocultar tudo: exibe ou oculta cada categoria
- Uma linha por categoria, clique na linha para mostrar / ocultá-la, clique na cor para alterá-la
-
Cor: Colorir toda a nuvem de pontos com uma única cor
- Selecione uma cor usando a paleta
- Use um código hexadecimal para selecionar a cor
- Escolha uma cor da lista padrão
-
Composto: Use esta opção se quiser usar várias opções ao mesmo tempo, arraste os controladores para aumentar / diminuir o uso.
- RGBA: Nuvem de pontos colorida
- Gamma: Basicamente a exposição da nuvem de pontos, menor gamma equivale a maior exposição, maior gamma, menor exposição, dá um look de pôr-do-sol
- Brilho: O brilho da nuvem de pontos, menor brilho a tornará mais escura, maior brilho a tornará mais clara.
- Contraste: Altera o contraste da nuvem de pontos, menor contraste fará a nuvem de pontos ficar cinza, maior contraste superexporá as cores padrão (vermelho, amarelo, verde, azul…)
- Intensidade: Força ou magnitude do sinal
- Alcance: De baixa intensidade a alta
- Gamma: Basicamente a exposição da nuvem de pontos, menor gamma equivale a maior exposição, maior gamma, menor exposição, dá um look de pôr-do-sol
- Brilho: O brilho da nuvem de pontos, menor brilho a tornará mais escura, maior brilho a tornará mais clara.
- Contraste: Altera o contraste da nuvem de pontos, menor contraste fará a nuvem de pontos ficar cinza, maior contraste superexporá as cores padrão (vermelho, amarelo, verde, azul…)
- Elevação: Altura ou posição vertical de cada ponto
- Faixa de elevação: define onde o gradiente começa e termina em termos de altura
- Modo de gradiente
- Clamp: Gradiente padrão, fora da faixa, mantém a cor final da borda
- Repetir: Quando o gradiente termina, começa de novo a partir da cor original
- Repetir espelho: Quando o gradiente termina, coloca um novo gradiente invertido, semelhante a repetir, mas sem descontinuidade de cores
- Esquema de gradiente: Altere as cores do gradiente, seleção apenas de uma lista predefinida
- Análise: Somente se disponível nessa nuvem de pontos, comparação de modelo para nuvem de pontos
- Classificação: Somente se disponível nessa nuvem de pontos, divide diferentes tipos de objetos (solo, vegetação, edifícios…)
- Número de retornos: Quantidade de pulsos necessários para obter esse ponto
- ID de fonte do ponto: Agrupado por ID de varredura
- RGBA: Nuvem de pontos colorida
-
Elevação: Representa a altura ou posição vertical de cada ponto. Dados de elevação são importantes em muitas aplicações de nuvens de pontos, como mapeamento topográfico, modelagem de inundação, planejamento urbano e design de infraestrutura. Analisando os dados de elevação, é possível criar modelos digitais de elevação (DEMs) precisos e detalhados que podem ser usados para uma ampla gama de análises geoespaciais e finalidades de visualização.
- Faixa de elevação: define onde o gradiente começa e termina em termos de altura
- Modo de gradiente
- Clamp: Gradiente padrão, fora da faixa, mantém a cor final da borda
- Repetir: Quando o gradiente termina, começa de novo a partir da cor original
- Repetir espelho: Quando o gradiente termina, coloca um novo gradiente invertido, semelhante a repetir, mas sem descontinuidade de cores
- Esquema de gradiente: Altere as cores do gradiente, seleção apenas de uma lista predefinida
-
Tempo-GPS: Tempo GPS é um atributo importante associado a cada ponto na nuvem de pontos. Ele fornece informações sobre o momento em que o pulso laser foi emitido e o tempo em que o pulso de retorno foi recebido, permitindo o cálculo preciso do alcance e da posição do ponto. Além disso, o tempo GPS também pode ser usado para controle de qualidade e finalidades de análise. Ao analisar a distribuição dos valores de tempo GPS na nuvem de pontos, é possível identificar áreas com anomalias temporais ou erros, que podem indicar problemas com os dados ou o sistema LiDAR.
-
Índices: Índices são atributos associados a cada ponto em uma nuvem de pontos LiDAR que fornecem informações adicionais sobre as propriedades espaciais do ponto e suas relações com outros pontos na nuvem. Eles são frequentemente usados para dar suporte a tarefas avançadas de análise e processamento, como segmentação, classificação e extração de recursos. Existem vários tipos de índices que podem ser usados no processamento de nuvens de pontos LiDAR, incluindo:
- Vetor normal: Este índice representa a orientação do ponto em relação ao seu entorno local. Pode ser usado para identificar superfícies planas ou para estimar normais de superfície para reconstrução de superfícies.
- Curvatura: Este índice representa a curvatura local da superfície no ponto. Pode ser usado para identificar bordas afiadas ou para estimar o raio de curvatura de superfícies curvas.
- Altura acima do solo: Este índice representa a altura do ponto acima do solo ou uma superfície de referência. Pode ser usado para modelagem de terreno ou para identificar objetos que estão acima ou abaixo da superfície do solo.
- Altura relativa: Este índice representa a altura do ponto em relação aos seus pontos vizinhos. Pode ser usado para identificar objetos que estão mais altos ou mais baixos que seus arredores.
- Densidade: Este índice representa a densidade de pontos na vizinhança local em torno do ponto. Pode ser usado para identificar áreas com alta ou baixa densidade de pontos, como vegetação ou fachadas de edifícios.
-
Intensidade: Representa a força ou magnitude do sinal que foi recebido por um sensor ou dispositivo quando o ponto foi capturado. Em alguns casos, a intensidade está relacionada à refletância do objeto naquele ponto. Por exemplo, em uma nuvem de pontos LiDAR, o valor de intensidade representa a quantidade de luz laser que foi refletida de volta para o sensor pelo objeto. Nesse caso, um valor de intensidade mais alto indicaria uma superfície que reflete mais luz, como uma parede branca, enquanto um valor de intensidade mais baixo indicaria uma superfície que reflete menos luz, como um carro preto. Em outros casos, a intensidade pode representar uma quantidade física diferente. Por exemplo, em uma nuvem de pontos fotográficos, a intensidade pode representar o brilho de um pixel na imagem original que foi usada para gerar a nuvem de pontos.
- Alcance: De baixa intensidade a alta
- Gamma: Basicamente a exposição da nuvem de pontos, menor gamma equivale a maior exposição, maior gamma, menor exposição, dá um look de pôr-do-sol
- Brilho: O brilho da nuvem de pontos, menor brilho a tornará mais escura, maior brilho a tornará mais clara.
- Contraste: Altera o contraste da nuvem de pontos, menor contraste fará a nuvem de pontos ficar cinza, maior contraste superexporá as cores padrão (vermelho, amarelo, verde, azul…)
-
Gradiente de intensidade: É uma medida da mudança na intensidade entre pontos vizinhos em uma nuvem de pontos. Representa a taxa de variação da intensidade em relação à distância ou posição. O gradiente de intensidade é calculado tomando o gradiente dos valores de intensidade na nuvem de pontos. Isso envolve o cálculo das derivadas parciais dos valores de intensidade em relação às coordenadas x, y e z de cada ponto. A magnitude do vetor gradiente em cada ponto representa o valor do gradiente de intensidade. Valores altos de gradiente de intensidade indicam bordas ou limites nítidos, enquanto valores baixos indicam transições suaves ou graduais.
- Alcance: De baixa intensidade a alta
- Gamma: Basicamente a exposição da nuvem de pontos, menor gamma equivale a maior exposição, maior gamma, menor exposição, dá um look de pôr-do-sol
- Brilho: O brilho da nuvem de pontos, menor brilho a tornará mais escura, maior brilho a tornará mais clara.
- Contraste: Altera o contraste da nuvem de pontos, menor contraste fará a nuvem de pontos ficar cinza, maior contraste superexporá as cores padrão (vermelho, amarelo, verde, azul…)
-
Nível de detalhe: No processamento de nuvens de pontos LiDAR, o Nível De Detalhe (LOD) pode se referir à densidade de pontos na nuvem de pontos, à resolução dos dados ou ao nível de abstração usado para representar os dados. Por exemplo, uma nuvem de pontos com alto nível de detalhe teria uma alta densidade de pontos, alta resolução e um nível fino de abstração. Por outro lado, uma nuvem de pontos com baixo nível de detalhe teria uma densidade de pontos mais baixa, resolução mais baixa e um nível de abstração grosseiro.
-
Matcap: No processamento de nuvens de pontos LiDAR, matcap pode ser usado para adicionar texturas visuais e efeitos de sombreamento a modelos 3D criados a partir de nuvens de pontos. Aplicando uma textura matcap a um modelo 3D, é possível criar uma representação mais realista e visualmente atraente da cena. Por exemplo, uma textura matcap poderia ser usada para simular a aparência de uma parede de concreto ou de uma casca de árvore, adicionando profundidade e realismo ao modelo 3D.
- Selecione a textura a ser aplicada
-
Número de retornos: Representa o número total de pulsos laser que foram emitidos e retornados ao sensor LiDAR para capturar aquele ponto específico. Semelhante ao número de retornos, o número de retornos pode variar de 1 a 5 ou mais, dependendo do sistema LiDAR usado. O número total de retornos pode fornecer informações sobre a complexidade e estrutura do objeto ou cena que está sendo escaneada. Por exemplo, um ponto com um número alto de retornos pode indicar um objeto com múltiplas camadas ou geometria complexa, como um dossel de árvore ou uma fachada de edifício.
-
ID da fonte do ponto: Identifica o sensor laser específico que gerou o ponto. Cada sensor laser em um sistema LiDAR tem um ID ou número único, e essa informação é registrada nos dados da nuvem de pontos para permitir análises e controle de qualidade. O ID da fonte do ponto é particularmente útil em situações onde múltiplos sensores LiDAR são usados para capturar uma cena ou área única. Identificando qual sensor gerou cada ponto, é possível realizar verificações de controle de qualidade nos dados e garantir que os dados estejam adequadamente alinhados e registrados entre diferentes sensores. Isso é especialmente importante em aplicações como silvicultura, onde múltiplos sensores LiDAR podem ser usados para capturar dados de diferentes ângulos e perspectivas. Na nossa plataforma, o ID da fonte do ponto é usado para armazenar o ID da varredura de origem, permitindo que os usuários acompanhem facilmente de qual varredura cada ponto na nuvem de pontos se originou. Por exemplo, se várias varreduras fossem feitas na mesma área usando um scanner laser 3D, cada varredura poderia ser atribuída a um ID de varredura único e o atributo de ID da fonte do ponto para cada ponto na nuvem de pontos poderia ser definido para o ID de varredura correspondente.
-
RGBA: É usado para representar a cor de cada ponto na nuvem de pontos. Os canais vermelho, verde e azul são usados para representar a cor do ponto, enquanto o canal alfa é usado para representar a transparência ou opacidade do ponto. O uso de cor em nuvens de pontos LiDAR pode ser útil para fins de visualização e interpretação, pois pode fornecer informações adicionais sobre as propriedades dos objetos e superfícies representados pelos pontos. Por exemplo, no mapeamento de vegetação, a cor dos pontos pode ser usada para distinguir entre diferentes tipos de vegetação ou para identificar áreas de alta ou baixa densidade de vegetação.
- Gamma: Basicamente a exposição da nuvem de pontos, menor gamma equivale a maior exposição, maior gamma, menor exposição, dá um look de pôr-do-sol
- Brilho: O brilho da nuvem de pontos, menor brilho a tornará mais escura, maior brilho a tornará mais clara.
- Contraste: Altera o contraste da nuvem de pontos, menor contraste fará a nuvem de pontos ficar cinza, maior contraste superexporá as cores padrão (vermelho, amarelo, verde, azul…)
-
Número de retornos: Representa o número de vezes que um pulso de laser foi emitido e retornado ao sensor LiDAR para capturar aquele ponto específico. Semelhante ao número de retornos, o número de retornos é tipicamente um valor entre 1 e 5, com 1 indicando o primeiro retorno e 5 indicando o quinto retorno. O primeiro retorno representa o pulso de laser que é refletido da superfície superior do objeto, enquanto retornos subsequentes podem representar reflexões de superfícies inferiores ou múltiplas reflexões dentro do objeto.
-
Classificação do ângulo de varredura: Representa o ângulo entre o feixe de laser e a linha de referência do scanner quando o pulso de laser foi emitido para capturar aquele ponto específico. A classificação do ângulo de varredura fornece informações sobre o ângulo em que o ponto foi capturado, com um valor de 0 indicando a linha de referência do scanner e valores positivos ou negativos indicando a desvio da linha de referência. Na extração de edifícios, a classificação do ângulo de varredura pode ser usada para identificar fachadas de edifícios e estruturas de telhado com base em sua orientação em relação à linha de referência do scanner. Na análise de superfícies de estradas, a classificação do ângulo de varredura pode ser usada para detectar defeitos ou irregularidades na superfície com base no ângulo do scanner em relação à superfície da estrada.
-
Dados do usuário: Permite que os usuários adicionem informações adicionais à nuvem de pontos além dos atributos padrão, como coordenadas XYZ, intensidade e número de retornos. Dados do usuário podem ser usados para armazenar uma ampla gama de informações, como valores de cor RGB, etiquetas de classificação ou metadados associados ao ponto. Por exemplo, dados do usuário podem ser usados para indicar se um ponto faz parte de um edifício, uma árvore ou uma estrada, ou para armazenar informações sobre a qualidade da medição do ponto ou sua incerteza. O uso de dados do usuário depende das necessidades específicas e aplicações do usuário. Pode ser usado para uma variedade de tarefas, como reconhecimento de objetos, classificação, segmentação e mapeamento. Ao adicionar dados personalizados do usuário a uma nuvem de pontos, é possível extrair informações mais significativas e realizar análises mais avançadas e tarefas de processamento.
Se a sua nuvem de pontos não aparecer corretamente à primeira vista, experimente os atributos RGBA ou de intensidade, pois são os mais utilizados.
Aprenda sobre as propriedades de nuvens de pontos neste artigo.
Se você encontrar algum problema, nossa equipe de suporte está aqui para ajudar. Feliz exploração!