Atrybuty chmury punktów
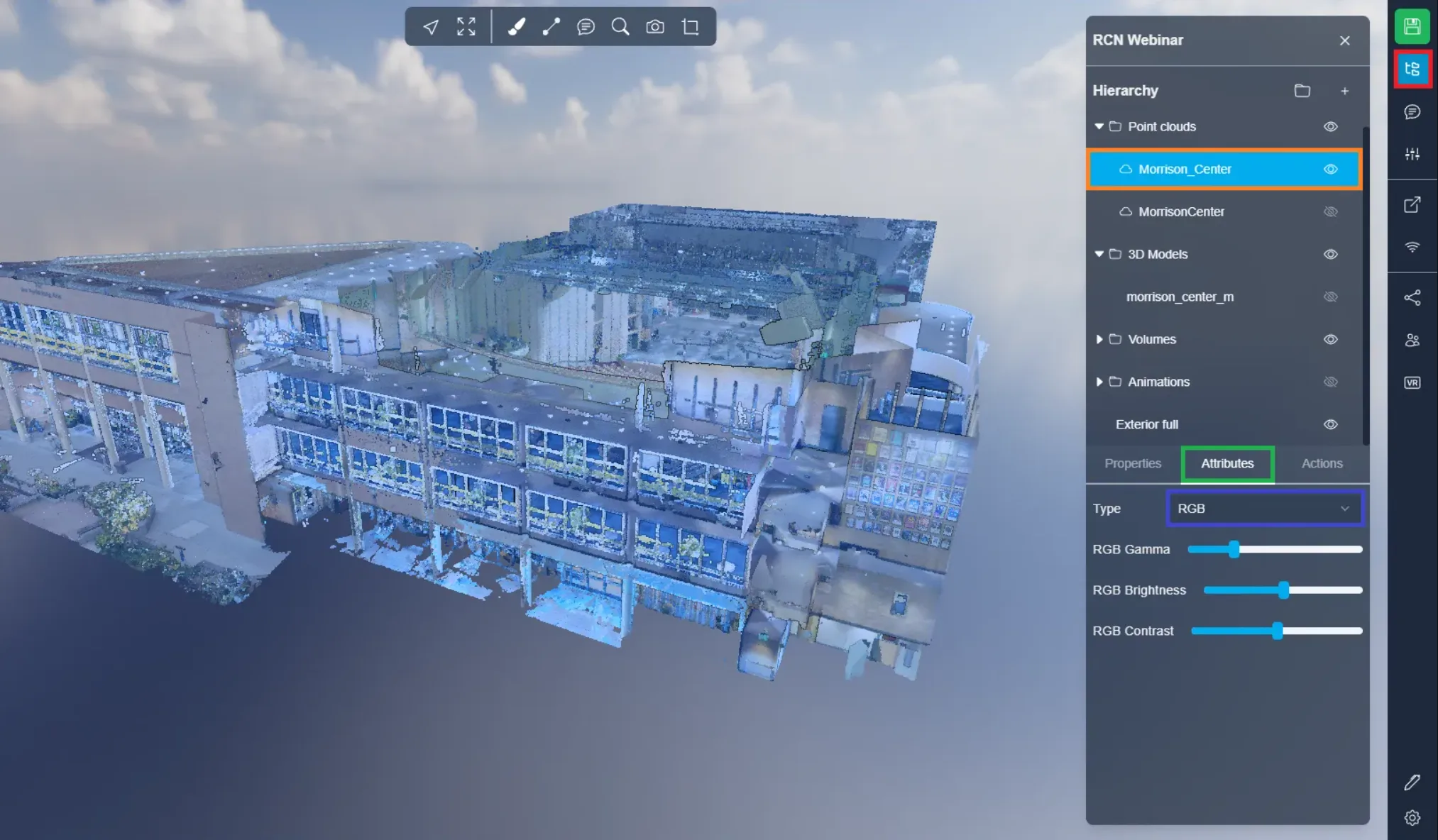
Aby uzyskać dostęp do atrybutów chmury punktów, otwórz menu projektu i wybierz swoją chmurę punktów. Kliknij na zakładkę Atrybuty, poniżej znajdziesz menu rozwijane, które wymienia wszystkie możliwe atrybuty, wybierz ten, który chcesz użyć. Poniżej znajdziesz listę wszystkich możliwych atrybutów i ich zastosowań.
-
Analiza: Działa tylko z chmurami punktów analizy, aby uzyskać więcej informacji o analizie, zobacz ten artykuł.
- Nazwa: Zmiana nazwy chmury punktów
- Zobacz pozycję
- Zobacz rotację
- Zobacz skalę
- Usuń analizę (zostanie usunięta tylko z Aplikacji 3D, można ją później ponownie załadować, jeśli jest to analiza po stronie serwera)
-
Klasyfikacja: Działa tylko z kompatybilnymi chmurami punktów. Celem klasyfikacji jest grupowanie podobnych punktów w znaczące kategorie, takie jak teren, roślinność, budynki i inne obiekty.
- Pokaż / ukryj wszystko: wyświetla lub ukrywa każdą kategorię
- Jedna linia na kategorię, kliknij na linię, aby ją pokazać / ukryć, kliknij na kolor, aby go zmienić
-
Kolor: Koloryzuje całą chmurę punktów jednym kolorem
- Wybierz kolor używając palety
- Użyj kodu heksadecymalnego, aby wybrać kolor
- Wybierz kolor z domyślnej listy
-
Kompozyt: Użyj tego, jeśli chcesz używać wielu opcji jednocześnie, przeciągnij suwaki, aby zwiększyć / zmniejszyć ich użycie.
- RGBA: Pokolorowana chmura punktów
- Gamma: W gruncie rzeczy ekspozycja chmury punktów; niższa gamma oznacza wyższą ekspozycję, a wyższa gamma niższą, co nadaje wygląd zachodu słońca
- Jasność: Jasność chmury punktów, niższa jasność sprawi, że będzie ciemniejsza, wyższa jasność sprawi, że będzie jaśniejsza.
- Kontrast: Zmienia kontrast chmury punktów, niższy kontrast sprawi, że chmura punktów stanie się szara, wyższy kontrast prześwietli standardowe kolory (czerwony, żółty, zielony, niebieski...)
- Intensywność: Siła lub wielkość sygnału
- Zakres: Od niskiej intensywności do wysokiej
- Gamma: W gruncie rzeczy ekspozycja chmury punktów; niższa gamma oznacza wyższą ekspozycję, a wyższa gamma niższą, co nadaje wygląd zachodu słońca
- Jasność: Jasność chmury punktów, niższa jasność sprawi, że będzie ciemniejsza, wyższa jasność sprawi, że będzie jaśniejsza.
- Kontrast: Zmienia kontrast chmury punktów, niższy kontrast sprawi, że chmura punktów stanie się szara, wyższy kontrast prześwietli standardowe kolory (czerwony, żółty, zielony, niebieski...)
- Wysokość: Wysokość lub pozycja pionowa każdego punktu
- Zakres wysokości: ustaw, gdzie zaczyna się i kończy gradient pod względem wysokości
- Tryb gradientu
- Przycięcie: Standardowy gradient; poza zakresem utrzymuje końcowy kolor krawędzi
- Powtórzenie: Kiedy gradient się kończy, zaczyna od nowa od oryginalnego koloru
- Powtórzenie lustrzane: Kiedy gradient się kończy, nakłada nowy gradient odbity, podobny do powtórzenia, z tą różnicą, że nie ma przerwy kolorystycznej
- Schemat gradientu: Zmienia kolory gradientu, wybór tylko z predefiniowanej listy
- Analiza: Tylko jeśli jest dostępna na tej chmurze punktów, model porównania chmury punktów
- Klasyfikacja: Tylko jeśli jest dostępna na tej chmurze punktów, dzieli różne typy obiektów (teren, roślinność, budynki...)
- Numer odbicia: Liczba impulsów potrzebnych do uzyskania tego punktu
- Identyfikator źródła punktu: Grupowany według identyfikatora skanu
- RGBA: Pokolorowana chmura punktów
-
Wysokość: Reprezentuje wysokość lub pozycję pionową każdego punktu. Dane o wysokości są ważne w wielu zastosowaniach chmur punktów, takich jak mapowanie topograficzne, modelowanie powodzi, planowanie miejskie i projektowanie infrastruktury. Analizując dane o wysokości, możliwe jest tworzenie dokładnych i szczegółowych cyfrowych modeli wysokościowych (DEM), które mogą być używane do szerokiego zakresu analiz geodezyjnych i celów wizualizacyjnych.
- Zakres wysokości: ustaw, gdzie zaczyna się i kończy gradient pod względem wysokości
- Tryb gradientu
- Przycięcie: Standardowy gradient; poza zakresem utrzymuje końcowy kolor krawędzi
- Powtórzenie: Kiedy gradient się kończy, zaczyna od nowa od oryginalnego koloru
- Powtórzenie lustrzane: Kiedy gradient się kończy, nakłada nowy gradient odbity, podobny do powtórzenia, z tą różnicą, że nie ma przerwy kolorystycznej
- Schemat gradientu: Zmienia kolory gradientu, wybór tylko z predefiniowanej listy
-
Czas GPS: Czas GPS jest istotnym atrybutem powiązanym z każdym punktem w chmurze punktów. Dostarcza informacji o czasie, w którym puls laserowy został wyemitowany, i czasie, w którym zwrotny puls został odebrany, co umożliwia dokładne obliczenie zasięgu i pozycji punktu. Dodatkowo czas GPS może być również wykorzystywany do celów kontroli jakości i analizy. Analizując rozkład wartości czasu GPS w całej chmurze punktów, można zidentyfikować obszary z anomaliami czasowymi lub błędami, co może wskazywać na problemy z danymi lub systemem LiDAR.
-
Indeksy: Indeksy to atrybuty związane z każdym punktem w chmurze punktów LiDAR, które dostarczają dodatkowych informacji o właściwościach przestrzennych punktu i relacjach z innymi punktami w chmurze. Często są wykorzystywane do wspierania zaawansowanych zadań analizy i przetwarzania, takich jak segmentacja, klasyfikacja i ekstrakcja cech. Istnieje kilka rodzajów indeksów, które można wykorzystać w przetwarzaniu chmur punktów LiDAR, w tym:
- Wektor normalny: Ten indeks reprezentuje orientację punktu względem jego lokalnego sąsiedztwa. Może być używany do identyfikacji powierzchni płaskich lub do szacowania powierzchni normalnej do rekonstrukcji powierzchni.
- Krzywizna: Ten indeks reprezentuje lokalną krzywiznę powierzchni w punkcie. Może być używany do identyfikacji ostrych krawędzi lub do szacowania promienia krzywizny dla powierzchni zakrzywionych.
- Wysokość nad ziemią: Ten indeks reprezentuje wysokość punktu nad ziemią lub powierzchnią odniesienia. Może być używany do modelowania terenu lub do identyfikacji obiektów znajdujących się powyżej lub poniżej powierzchni ziemi.
- Wysokość względna: Ten indeks reprezentuje wysokość punktu względem sąsiednich punktów. Może być używany do identyfikacji obiektów, które są wyższe lub niższe niż ich otoczenie.
- Gęstość: Ten indeks reprezentuje gęstość punktów w lokalnym sąsiedztwie wokół punktu. Może być używany do identyfikacji obszarów o wysokiej lub niskiej gęstości punktów, takich jak roślinność lub fasady budynków.
-
Intensywność: Reprezentuje siłę lub wielkość sygnału, który został odebrany przez sensor lub urządzenie, gdy punkt został zarejestrowany. W niektórych przypadkach intensywność jest związana ze współczynnikiem odbicia obiektu w tym punkcie. Na przykład w chmurze punktów LiDAR wartość intensywności reprezentuje ilość światła laserowego, które zostało odbite z powrotem do sensora przez obiekt. W tym przypadku wyższa wartość intensywności wskazywałaby powierzchnię, która odbija więcej światła, taką jak biała ściana, podczas gdy niższa wartość intensywności wskazywałaby powierzchnię, która odbija mniej światła, taką jak czarny samochód. W innych przypadkach intensywność może reprezentować inną wielkość fizyczną. Na przykład w fotograficznej chmurze punktów intensywność może reprezentować jasność piksela w oryginalnym obrazie, który został użyty do wygenerowania chmury punktów.
- Zakres: Od niskiej intensywności do wysokiej
- Gamma: W gruncie rzeczy ekspozycja chmury punktów; niższa gamma oznacza wyższą ekspozycję, a wyższa gamma niższą, co nadaje wygląd zachodu słońca
- Jasność: Jasność chmury punktów, niższa jasność sprawi, że będzie ciemniejsza, wyższa jasność sprawi, że będzie jaśniejsza.
- Kontrast: Zmienia kontrast chmury punktów, niższy kontrast sprawi, że chmura punktów stanie się szara, wyższy kontrast prześwietli standardowe kolory (czerwony, żółty, zielony, niebieski...)
-
Gradient intensywności: Jest to miara zmiany intensywności między sąsiednimi punktami w chmurze punktów. Reprezentuje tempo, w jakim intensywność zmienia się względem odległości lub pozycji. Gradient intensywności jest obliczany poprzez przyjęcie gradientu wartości intensywności w chmurze punktów. Obejmuje to obliczenie pochodnych cząstkowych wartości intensywności względem współrzędnych x, y i z dla każdego punktu. Wielkość wektora gradientu w każdym punkcie reprezentuje wartość gradientu intensywności. Wysokie wartości gradientu intensywności wskazują na ostre krawędzie lub granice, podczas gdy niskie wartości wskazują na płynne lub stopniowe przejścia.
- Zakres: Od niskiej intensywności do wysokiej
- Gamma: W gruncie rzeczy ekspozycja chmury punktów; niższa gamma oznacza wyższą ekspozycję, a wyższa gamma niższą, co nadaje wygląd zachodu słońca
- Jasność: Jasność chmury punktów, niższa jasność sprawi, że będzie ciemniejsza, wyższa jasność sprawi, że będzie jaśniejsza.
- Kontrast: Zmienia kontrast chmury punktów, niższy kontrast sprawi, że chmura punktów stanie się szara, wyższy kontrast prześwietli standardowe kolory (czerwony, żółty, zielony, niebieski...)
-
Poziom szczegółowości: W przetwarzaniu chmur punktów LiDAR poziom szczegółowości (LOD) może odnosić się do gęstości punktów w chmurze punktów, rozdzielczości danych lub poziomu abstrakcji użytego do przedstawienia danych. Na przykład chmura punktów o wysokim poziomie szczegółowości miałaby wysoką gęstość punktów, wysoką rozdzielczość i drobny poziom abstrakcji. Z kolei chmura punktów o niskim poziomie szczegółowości miałaby niższą gęstość punktów, niższą rozdzielczość i gruby poziom abstrakcji.
-
Matcap: W przetwarzaniu chmur punktów LiDAR matcap może być użyty do dodania wizualnych tekstur i efektów cieniowania do modeli 3D tworzonych z chmur punktów. Poprzez zastosowanie tekstury matcap do modelu 3D możliwe jest stworzenie bardziej realistycznej i wizualnie atrakcyjnej reprezentacji sceny. Na przykład tekstura matcap mogłaby być użyta do symulacji wyglądu ściany betonowej lub kory drzewa, dodając głębię i realizm do modelu 3D.
- Wybierz teksturę do zastosowania
-
Liczba odbić: Reprezentuje całkowitą liczbę impulsów laserowych, które zostały wyemitowane i zwrócone do sensora LiDAR w celu uchwycenia danego punktu. Podobnie jak numer odbicia, liczba odbić może wahać się od 1 do 5 lub więcej, w zależności od użytego systemu LiDAR. Całkowita liczba odbić może dostarczać informacji o złożoności i strukturze obiektu lub sceny, która jest skanowana. Na przykład punkt z dużą liczbą odbić może wskazywać na obiekt z wieloma warstwami lub złożoną geometrią, taką jak korona drzewa lub fasada budynku.
-
Identyfikator źródła punktu: Identyfikuje konkretny sensor laserowy, który wygenerował punkt. Każdy sensor laserowy w systemie LiDAR ma unikalny identyfikator lub numer, a ta informacja jest zapisana w danych chmury punktów, co umożliwia analizę i kontrolę jakości. Identyfikator źródła punktu jest szczególnie użyteczny w sytuacjach, gdy wiele sensorów LiDAR jest używanych do uchwycenia jednej sceny lub obszaru. Identyfikując, który sensor wygenerował każdy punkt, możliwe jest przeprowadzenie kontroli jakości danych i zapewnienie, że dane są prawidłowo wyrównane i zarejestrowane między różnymi sensorami. Jest to szczególnie ważne w zastosowaniach takich jak leśnictwo, gdzie wiele sensorów LiDAR może być używanych do rejestrowania danych pod różnymi kątami i z różnych perspektyw. Na naszej platformie identyfikator źródła punktu służy do przechowywania identyfikatora skanu źródłowego, co pozwala użytkownikom łatwo śledzić, z którego skanu pochodzi każdy punkt w chmurze punktów. Na przykład, jeśli wykonano wiele skanów tego samego obszaru za pomocą skanera laserowego 3D, każdy skan mógłby otrzymać unikalny identyfikator, a atrybut identyfikatora źródła punktu dla każdego punktu w chmurze punktów mógłby zostać ustawiony na odpowiadający mu identyfikator skanu.
-
RGBA: Jest używany do reprezentowania koloru każdego punktu w chmurze punktów. Kanały czerwony, zielony i niebieski są używane do reprezentowania koloru punktu, podczas gdy kanał alfa jest używany do reprezentowania przezroczystości lub nieprzezroczystości punktu. Użycie koloru w chmurach punktów LiDAR może być pomocne dla celów wizualizacyjnych i interpretacyjnych, ponieważ może dostarczać dodatkowych informacji o właściwościach obiektów i powierzchni reprezentowanych przez punkty. Na przykład, w mapowaniu roślinności, kolor punktów może być używany do odróżnienia różnych typów roślinności lub do identyfikacji obszarów o wysokiej lub niskiej gęstości roślinności.
- Gamma: W gruncie rzeczy ekspozycja chmury punktów; niższa gamma oznacza wyższą ekspozycję, a wyższa gamma niższą, co nadaje wygląd zachodu słońca
- Jasność: Jasność chmury punktów, niższa jasność sprawi, że będzie ciemniejsza, wyższa jasność sprawi, że będzie jaśniejsza.
- Kontrast: Zmienia kontrast chmury punktów, niższy kontrast sprawi, że chmura punktów stanie się szara, wyższy kontrast prześwietli standardowe kolory (czerwony, żółty, zielony, niebieski...)
-
Numer odbicia: Reprezentuje liczbę razy, kiedy impuls laserowy został wyemitowany i zwrócony do sensora LiDAR w celu uchwycenia danego punktu. Podobnie jak liczba odbić, numer odbicia jest zazwyczaj wartością od 1 do 5, gdzie 1 oznacza pierwsze odbicie, a 5 oznacza piąte odbicie. Pierwsze odbicie reprezentuje impuls laserowy odbity od górnej powierzchni obiektu, podczas gdy kolejne odbicia mogą reprezentować odbicia od niższych powierzchni lub wielokrotne odbicia wewnątrz obiektu.
-
Ranga kąta skanowania: Reprezentuje kąt między wiązką laserową a linią odniesienia skanera, kiedy impuls laserowy został wyemitowany, aby uchwycić ten punkt. Ranga kąta skanowania dostarcza informacji o kącie, pod którym punkt został uchwycony, z wartością 0 oznaczającą linię odniesienia skanera i wartościami dodatnimi lub ujemnymi wskazującymi odchylenie od linii odniesienia. W ekstrakcji budynków ranga kąta skanowania może być używana do identyfikacji fasad budynków i struktur dachowych na podstawie ich orientacji względem linii odniesienia skanera. W analizie powierzchni drogowej ranga kąta skanowania może być używana do wykrywania defektów powierzchni lub nieregularności na podstawie kąta skanera względem powierzchni drogi.
-
Dane użytkownika: Pozwalają użytkownikom dodawać dodatkowe informacje do chmury punktów poza standardowymi atrybutami, takimi jak współrzędne XYZ, intensywność i numer odbicia. Dane użytkownika mogą być używane do przechowywania szerokiego zakresu informacji, takich jak wartości kolorów RGB, etykiety klasyfikacyjne lub metadane związane z punktem. Na przykład dane użytkownika mogą być używane do wskazywania, czy punkt jest częścią budynku, drzewa lub drogi, lub do przechowywania informacji o jakości pomiaru punktu lub jego niepewności. Użycie danych użytkownika zależy od konkretnych potrzeb i zastosowań użytkownika. Mogą być używane do różnych zadań, takich jak rozpoznawanie obiektów, klasyfikacja, segmentacja i mapowanie. Dodając spersonalizowane dane użytkownika do chmury punktów, możliwe jest wydobycie bardziej znaczących informacji i przeprowadzenie bardziej zaawansowanych analiz i zadań przetwarzania.
Jeśli Twoja chmura punktów nie wyświetla się poprawnie na początku, spróbuj użyć atrybutów RGBA lub intensywności, ponieważ są one najczęściej używane.
Dowiedz się o właściwościach chmury punktów w tym artykule.
Jeśli napotkasz jakiekolwiek problemy, nasz zespół wsparcia jest do Twojej dyspozycji. Miłego odkrywania!