Autodesk Revit 플러그인 - 포인트 클라우드 관리
Autodesk Revit 플러그인이 컴퓨터에 설치되어 있지 않다면, 먼저 "Autodesk Revit Plug-in - Installation" 문서를 참조한 후, 이 작업이 완료된 후 다시 돌아오시기 바랍니다.
팁: 이 문서에서의 지침을 모두 따르려면 먼저 포인트 클라우드를 추가하는 것이 좋습니다. 만약 추가하지 않았다면, "Autodesk Revit Plug-in - Insert a point cloud" 문서를 참조하시기 바랍니다.
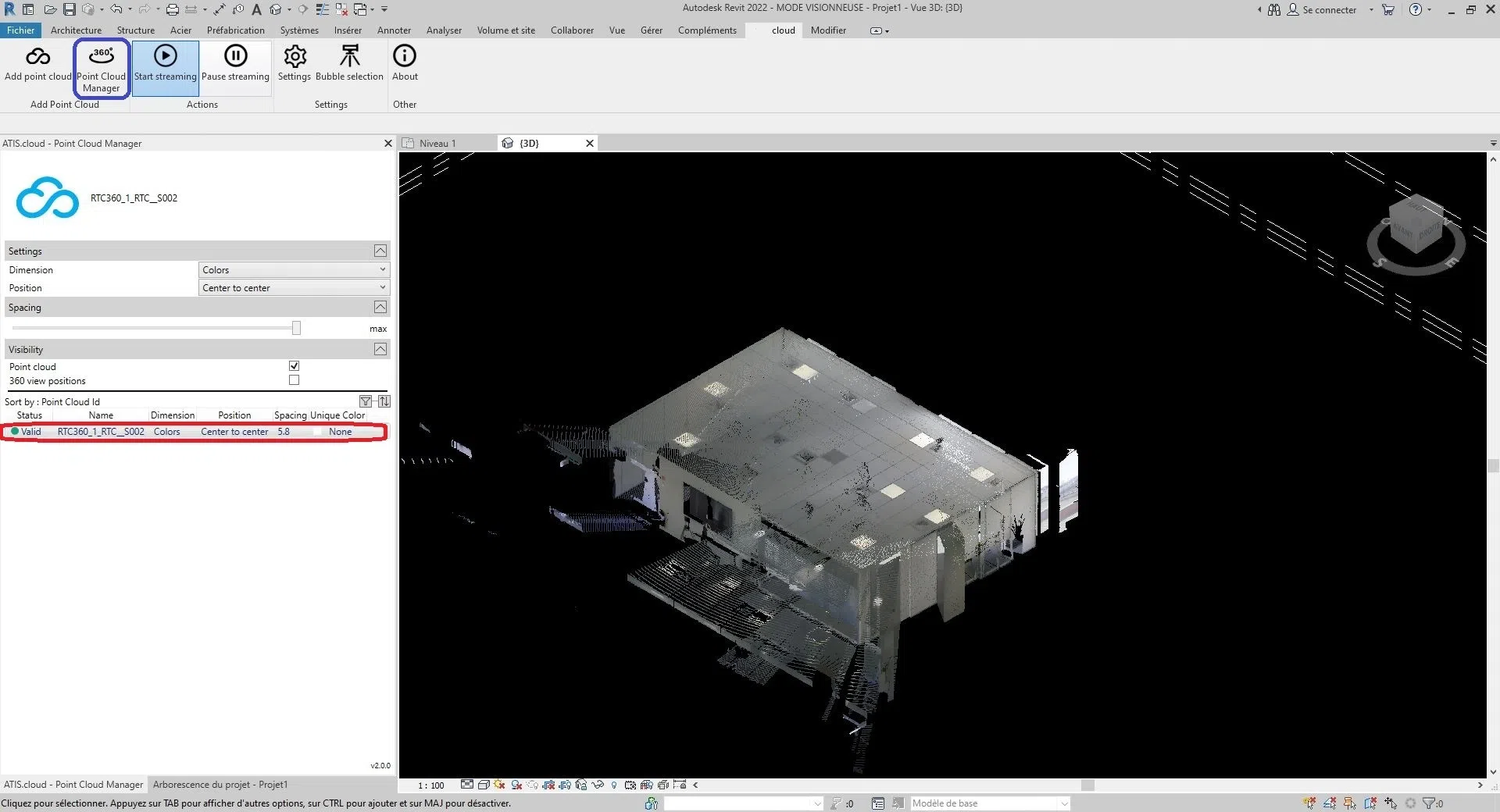
"포인트 클라우드 관리자"는 웹사이트에서 Autodesk Revit 프로젝트의 각 포인트 클라우드의 매개변수를 수정할 수 있는 그래픽 인터페이스입니다. 이 창을 통해 인터페이스를 이동하고 크기를 조정하며 Autodesk Revit 화면의 일측에 고정할 수 있습니다.
시작하려면, "포인트 클라우드 관리자" 창에 있는 포인트 클라우드를 클릭하십시오. 인터페이스가 표시되지 않는다면, "Cloud" 툴바의 "포인트 클라우드 추가" 카테고리에 있는 "포인트 클라우드 관리자" 버튼을 클릭하십시오.
"포인트 클라우드 관리자" 인터페이스의 일부가 나타났습니다. 인터페이스는 다음과 같이 나뉘어 있습니다:
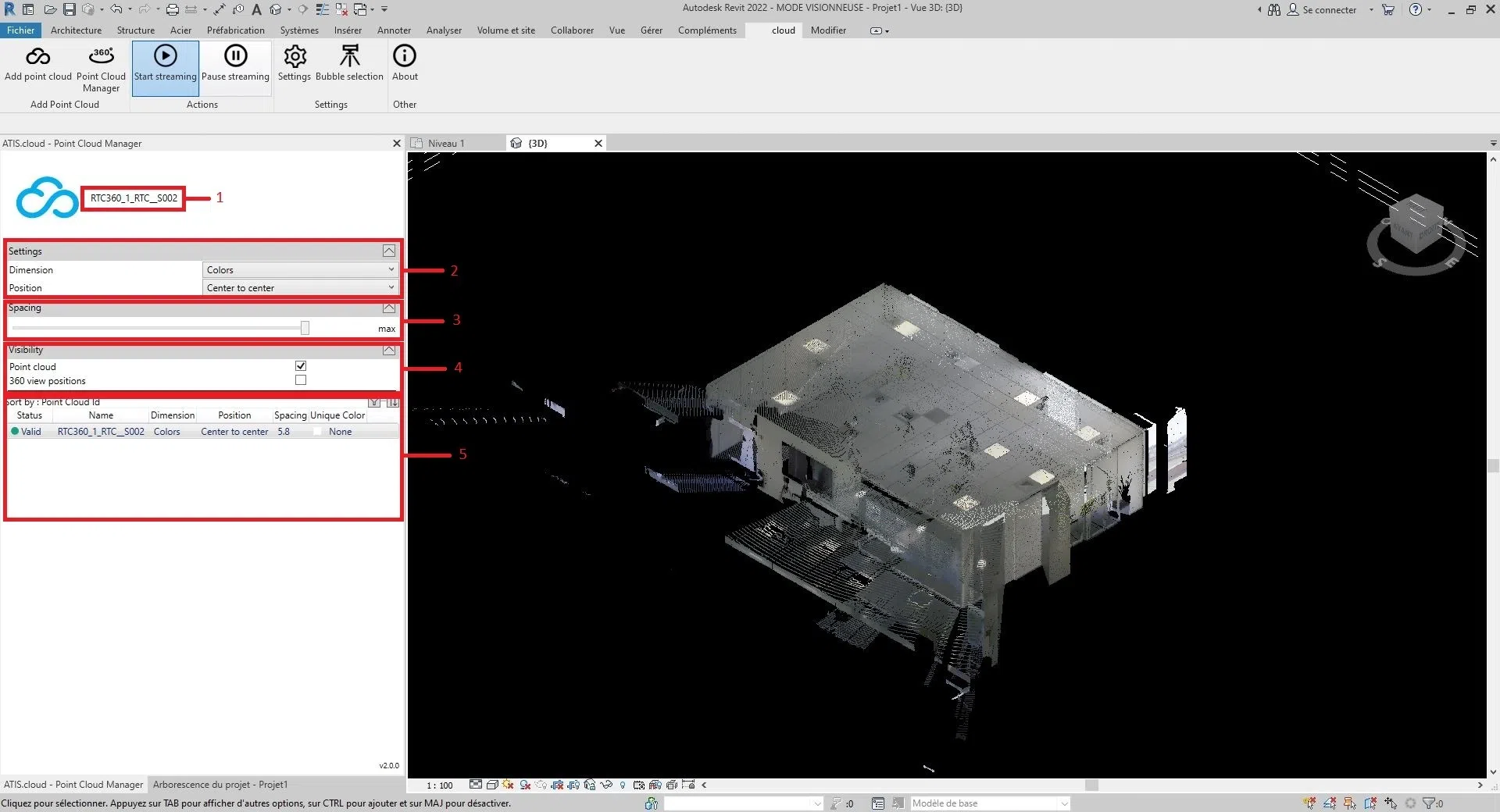
1: 선택한 클라우드의 이름, 표시된 이름은 웹 프로젝트 이름과 동일합니다.
2: 클라우드의 크기와 위치와 같은 특성
3: 클라우드의 각 포인트 간 거리
4: 포인트 클라우드와 스캐너 가시성 매개변수 (스캐너에 대한 자세한 내용은 "Autodesk Revit 스캐너" 문서를 참조하십시오)
5: Autodesk Revit 플러그인을 통해 삽입된 모든 클라우드, 각 클라우드의 주요 매개변수를 한눈에 볼 수 있으며 정렬할 수 있습니다.
- 팁:
- 각 섹션의 오른쪽에 있는 화살표 버튼을 사용하여 섹션을 접거나 펼칠 수 있습니다.
- "가시성" 섹션과 6번 부분 사이의 검은색 막대를 잡고 마우스를 이동하여 크기를 조정할 수 있습니다.
이제 각 포인트 클라우드의 각 매개변수를 수정할 수 있습니다.
- 클라우드의 차원 조정은 "차원 변경" 섹션으로 가십시오;
- 클라우드의 위치 조정은 "위치 편집" 섹션으로 가십시오;
- 클라우드의 포인트 간 거리 조정은 "간격 조정" 섹션으로 가십시오;
- 클라우드 또는 스캐너의 가시성 조정은 "가시성 변경" 섹션으로 가십시오.
선택한 차원을 수정하려면, "차원" 오른쪽에 있는 선택 상자를 클릭하십시오.
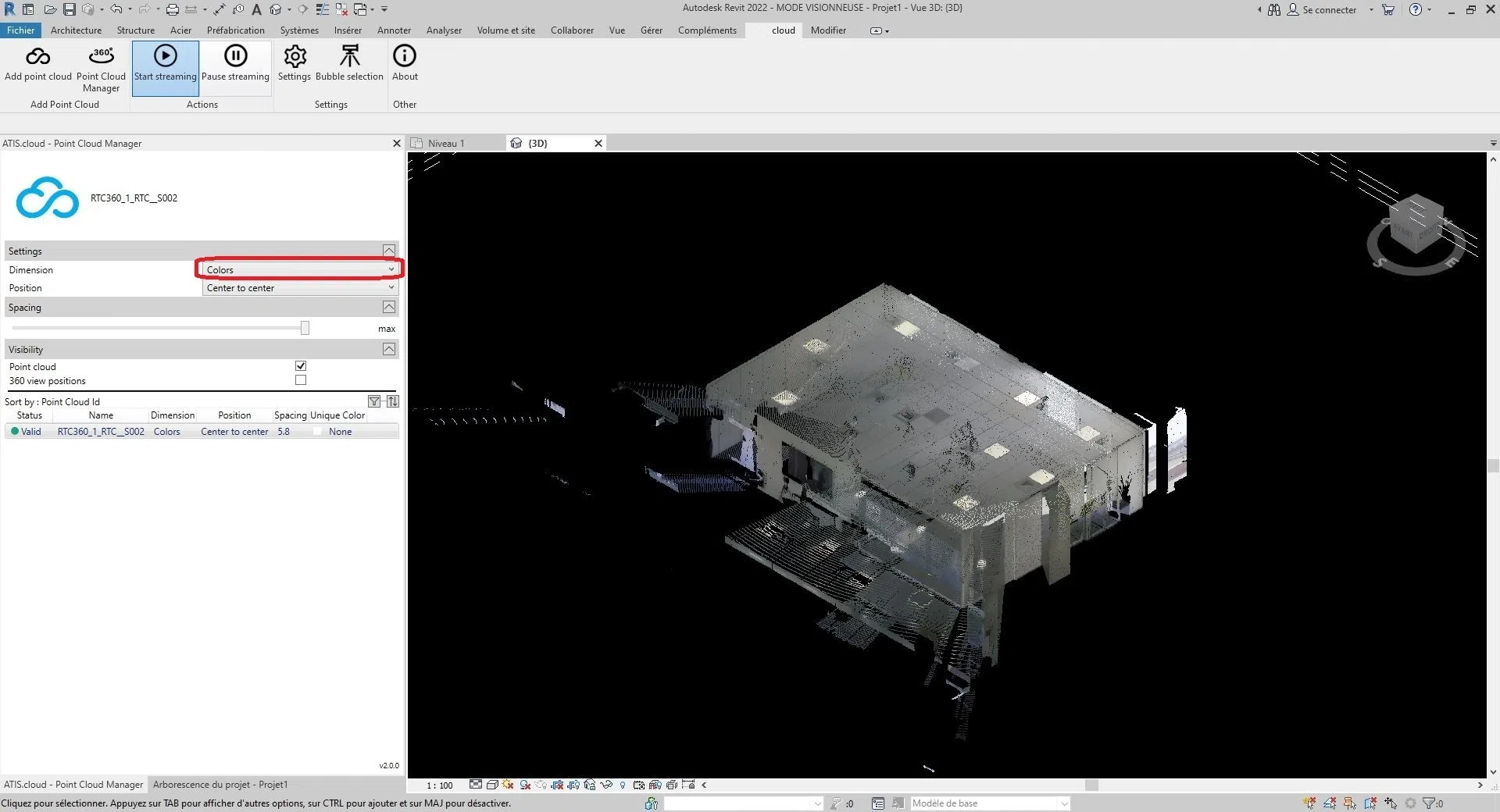
선택할 수 있는 차원은 여섯 가지입니다:
색상, 강도, 분류, 높이, 포인트 소스 ID 및 고유 색상.
- 색상: 포인트 클라우드의 각 포인트 색상을 나타내는 데 사용됩니다. 빨간색, 녹색 및 파란색 채널은 점의 색상을 나타내는 데 사용되며, 알파 채널은 점의 투명도 또는 불투명도를 나타내는 데 사용됩니다. LiDAR 포인트 클라우드에서 색상의 사용은 시각화 및 해석 목적에 유용할 수 있으며, 이는 점으로 표현된 객체와 표면의 속성에 대한 추가 정보를 제공할 수 있습니다. 예를 들어, 식생 매핑에서 포인트의 색상은 서로 다른 유형의 식생을 구분하거나 높은 또는 낮은 식생 밀도의 영역을 식별하는 데 사용될 수 있습니다.
- 강도: 포인트가 캡처될 때 센서 또는 장치가 수신한 신호의 강도 또는 진폭을 나타냅니다. 일부 경우, 강도는 해당 지점에서 객체의 반사율과 관련이 있습니다. LiDAR 포인트 클라우드에서 강도 값은 객체에 의해 센서로 반사된 레이저 빛의 양을 나타냅니다. 이 경우, 더 높은 강도 값은 더 많은 빛을 반사하는 표면을 나타내며, 예를 들어 흰색 벽의 경우가 됩니다. 반면, 낮은 강도 값은 더 적은 빛을 반사하는 표면, 예를 들어 검은색 자동차의 경우가 됩니다. 다른 경우에는 강도가 다른 물리적 양을 나타낼 수 있습니다. 예를 들어, 사진 포인트 클라우드에서 강도는 포인트 클라우드를 생성하는 데 사용된 원본 이미지에서 픽셀의 밝기를 나타낼 수 있습니다.
- 분류: 호환 가능한 포인트 클라우드에서만 작동합니다. 분류의 목적은 유사한 점을 토양, 식물, 건물 및 기타 객체와 같은 의미 있는 카테고리로 그룹화하는 것입니다.
- 높이: 각 점의 높이 또는 수직 위치를 나타냅니다. 높이 데이터는 지형 매핑, 홍수 모델링, 도시 계획 및 인프라 디자인 등 많은 포인트 클라우드 애플리케이션에서 중요합니다. 높이 데이터를 분석함으로써 정확하고 상세한 디지털 고도 모델 (DEM)을 생성할 수 있으며, 이는 다양한 지리 공간 분석 및 시각화 목적에 사용될 수 있습니다.
- 포인트 소스 ID: 포인트를 생성한 특정 레이저 센서를 식별합니다. LiDAR 시스템의 각 레이저 센서는 고유 식별자 또는 번호를 가지며, 이 정보는 분석 및 품질 관리를 위해 포인트 클라우드 데이터에 기록됩니다. 포인트 소스 식별은 여러 LiDAR 센서가 단일 장면 또는 영역을 캡처하는 상황에서 특히 유용합니다. 각 포인트를 생성한 센서를 식별함으로써, 데이터 품질 검사를 수행하고 서로 다른 센서 간 데이터가 적절히 정렬되고 등록되도록 보장할 수 있습니다. 이는 여러 LiDAR 센서를 사용하여 서로 다른 각도와 관점에서 데이터를 캡처하는 응용 분야와 같은 곳에서 특히 중요합니다. 저희 플랫폼에서는 포인트 소스 ID를 사용하여 소스 분석 ID를 저장하므로, 사용자가 포인트 클라우드의 각 포인트가 어느 분석에서 유래되었는지 쉽게 추적할 수 있습니다. 예를 들어, 3D 레이저 스캐너를 사용하여 동일한 지역에 여러 번 스캔을 수행했을 경우, 각 스캔에 고유한 스캔 ID를 할당하고 포인트 클라우드의 각 포인트의 포인트 소스 ID 속성을 해당 스캔 ID로 설정할 수 있습니다.
- 고유 색상: "고유 색상" 차원의 목표는 사용자가 정의한 고유 색상으로 포인트 클라우드를 색칠할 수 있도록 하는 것입니다.
선택한 위치를 수정하려면, "위치" 오른쪽에 있는 선택 상자를 클릭하십시오.
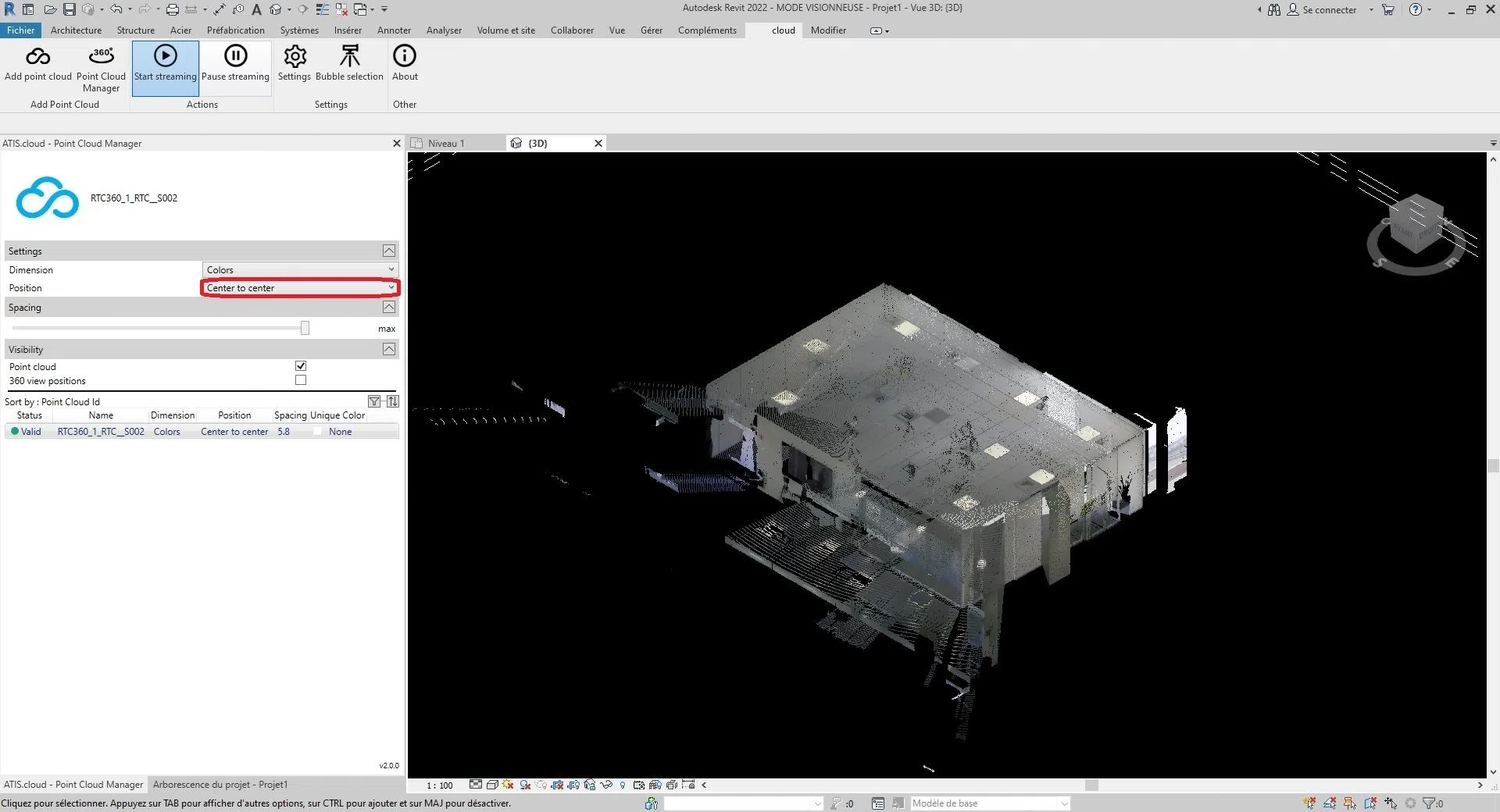
다음 세 가지 옵션 중에서 선택할 수 있습니다:
"센터 대 센터", "내부 기준점", 또는 "공유 사이트에서"입니다.
- 센터 대 센터: 이 옵션은 뷰포트의 중심을 기준점으로 사용하여 포인트 클라우드를 배치합니다.
- 내부 기준점: 이 옵션은 클라우드의 내부 기준점을 기준으로 포인트 클라우드를 배치합니다. 내부 기준점은 일반적으로 포인트 클라우드 자체의 좌표계에 의해 정의됩니다. 이 옵션을 사용하면, 포인트 클라우드는 Autodesk Revit 프로젝트의 기준점이 아닌 내부 기준점에 따라 배치됩니다. 이는 포인트 클라우드를 자체 내부 좌표계에 정렬해야 할 때 유용할 수 있습니다.
- 공유 사이트에서: 이 옵션은 공유 사이트의 위치에 포인트 클라우드를 배치합니다. 공유 사이트는 여러 프로젝트가 기반이 될 수 있는 공통 지리적 위치를 나타냅니다. 이 옵션을 사용하면, 포인트 클라우드는 공유 사이트의 좌표에 따라 배치됩니다. 이는 공통 사이트를 기반으로 한 프로젝트에서 작업할 때 유용하며 포인트 클라우드를 해당 공유 위치에 정렬할 수 있습니다.
- 자동 - 마지막 배치된 기준점: Autodesk Revit은 다음에 가져오는 포인트 클라우드를 이전에 가져온 포인트 클라우드와 일관되게 배치합니다. 이 옵션은 첫 번째 포인트 클라우드를 삽입한 후 활성화됩니다. 예를 들어 첫 번째 클라우드를 올바르게 모델의 요소와 정렬하기 위해 이동시킬 수 있습니다. 동일한 사이트와 동일한 좌표계에서 생성된 추가 포인트 클라우드가 있다면, 이 옵션을 사용하여 추가 포인트 클라우드를 삽입하는 것이 추천됩니다. 그러면 새로운 포인트 클라우드는 첫 번째 클라우드에 상대적으로 올바르게 배치됩니다.
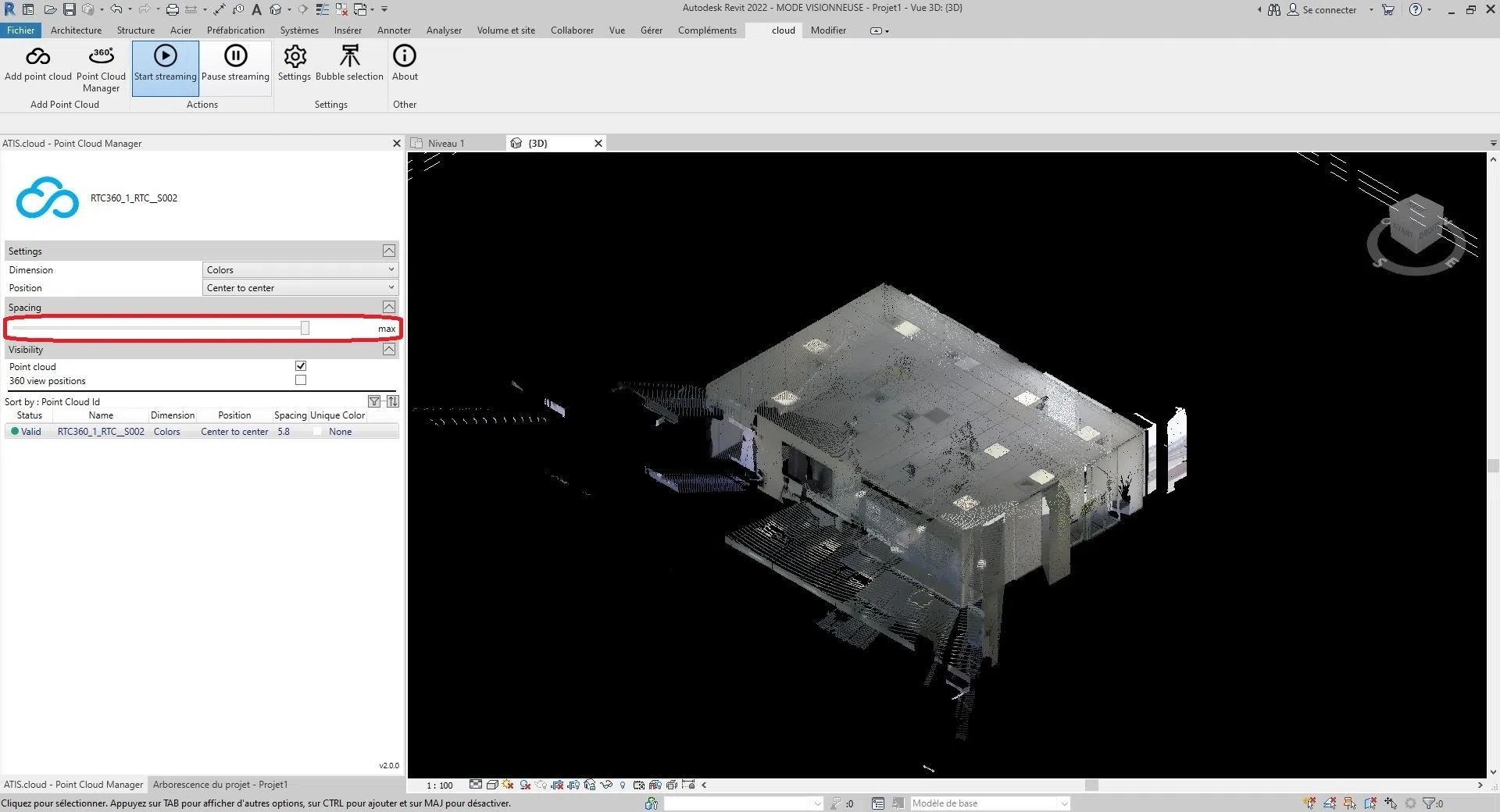
클라우드의 포인트 간 간격을 수정하려면, "간격" 섹션의 막대를 이동하십시오.
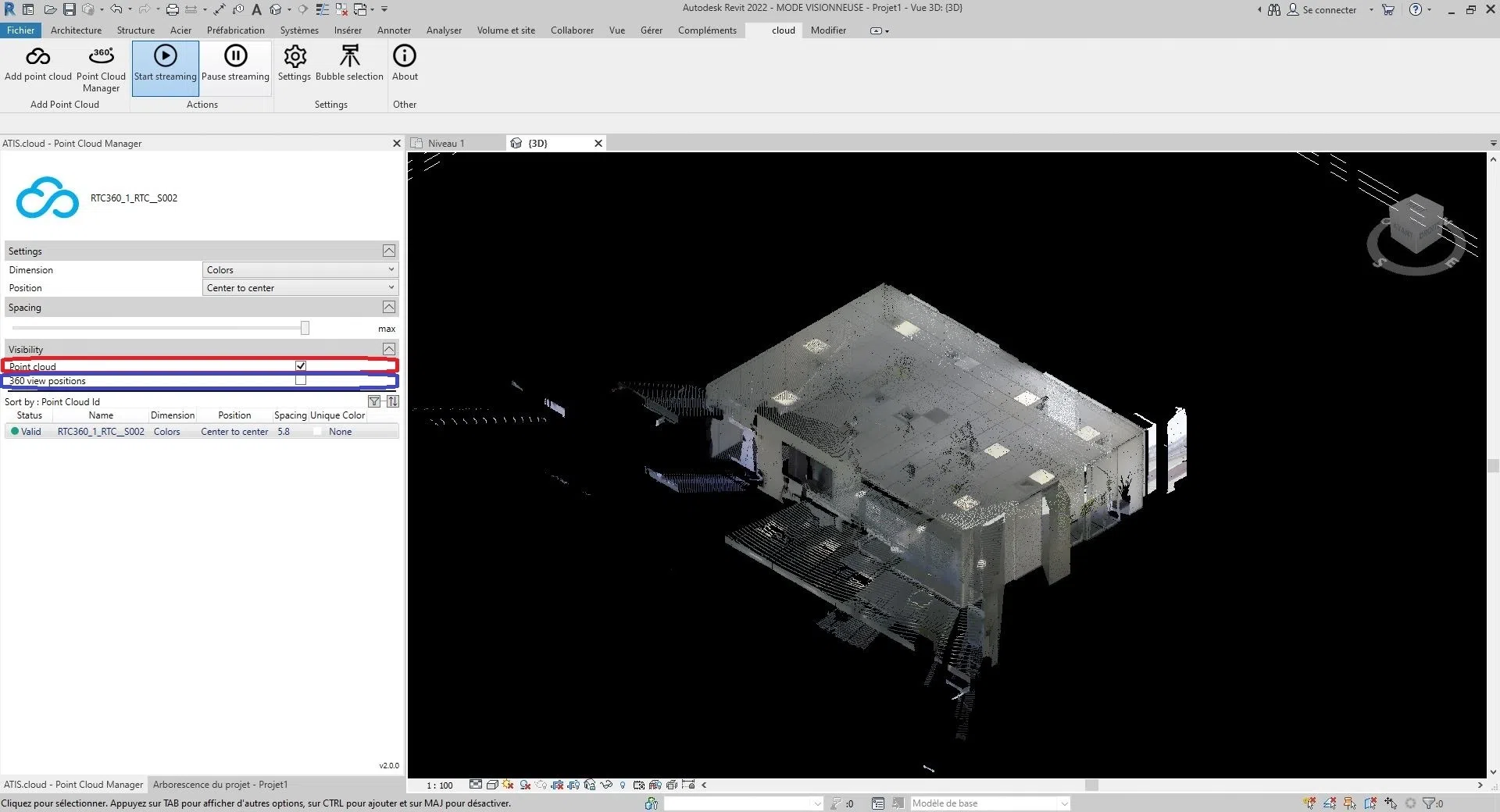
가시성을 변경하는 방법은 두 가지입니다. "가시성" 섹션의 "포인트 클라우드" 오른쪽에 있는 상자를 체크/체크 해제하여 포인트 클라우드를 표시하거나 숨길 수 있습니다. 또는, "가시성" 섹션의 "360 뷰" 오른쪽에 있는 상자를 체크/체크 해제하여 포인트 클라우드 스캐너를 표시하거나 숨길 수 있습니다. (프로젝트의 다양한 뷰 간 가시성은 동일합니다)
- 팁:
- 스캐너 정보는 " 버블 관리 " 카테고리에 있습니다.
- 3D 애플리케이션에서 포인트 클라우드를 확대하려면, 해당 클라우드를 더블 클릭하면 됩니다.
축하합니다! "포인트 클라우드 관리자" 인터페이스에 대한 모든 정보를 습득하셨습니다.
문제가 발생하면, 저희 지원 팀이 도와드릴 준비가 되어 있습니다. 즐겁게 탐색하시기 바랍니다!