Autodesk Revit プラグイン - 点群の管理
お使いのコンピューターにAutodesk Revitプラグインがインストールされていない場合は、まず「 Autodesk Revitプラグイン - インストール 」の記事に行き、その後この操作が終了したら戻ってきてください。
ヒント: この記事の指示を完全に従うためには、まず点群を追加することをお勧めします。まだ行っていない場合は、「 Autodesk Revitプラグイン - 点群を挿入 」の記事に行ってください。
「点群マネージャー」は、ウェブサイトからAutodesk Revitプロジェクトの各点群のパラメーターを変更するためのグラフィカルインターフェースです。このウィンドウでは、インターフェースを移動したり、サイズを変更したり、Autodesk Revitの画面の一側に固定したりすることができます。
最初に、「点群マネージャー」ウィンドウで点群をクリックしてください。もしインターフェースが表示されていなければ、「点群マネージャー」ボタンをクリックしてください。「点群を追加」カテゴリーの「クラウド」ツールバーにあります。
「点群マネージャー」インターフェースの一部が表示されました。このインターフェースは次のように分かれています:
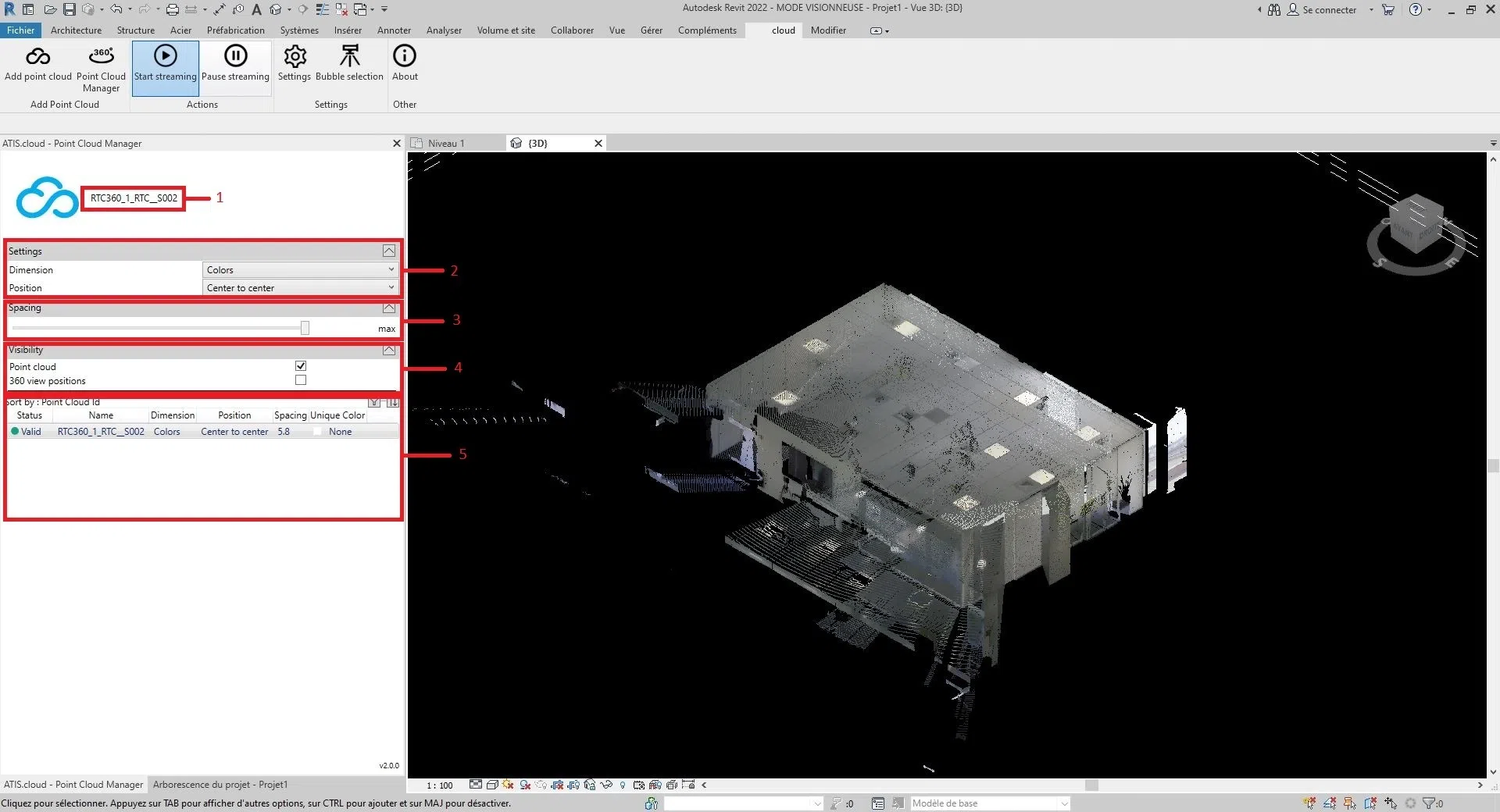
1: 選択されたクラウドの名前。表示される名前はウェブプロジェクトのものと同じです。
2: クラウドの特性、例えばクラウドの寸法と位置。
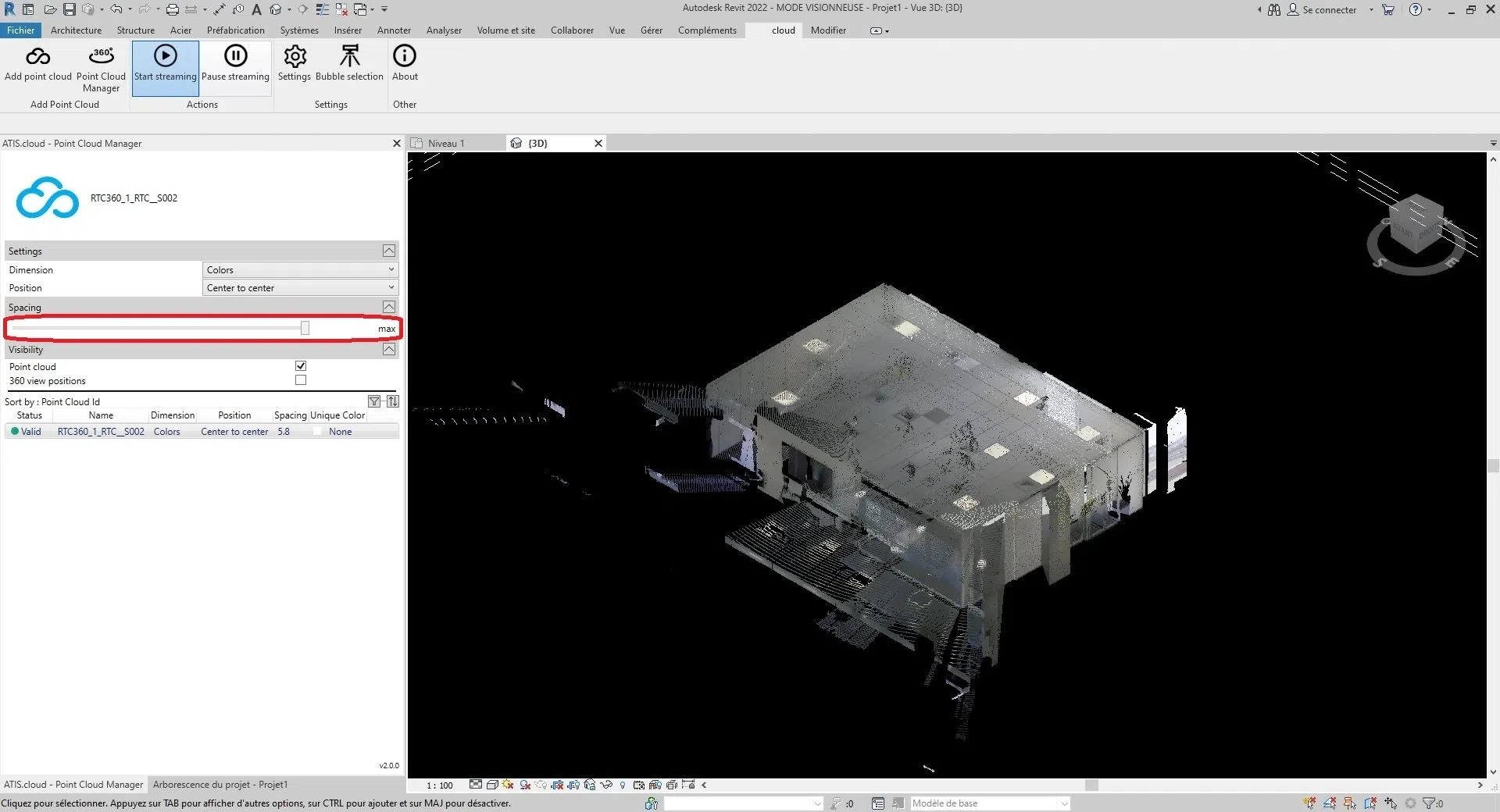
3: クラウドの各ポイントの間隔。
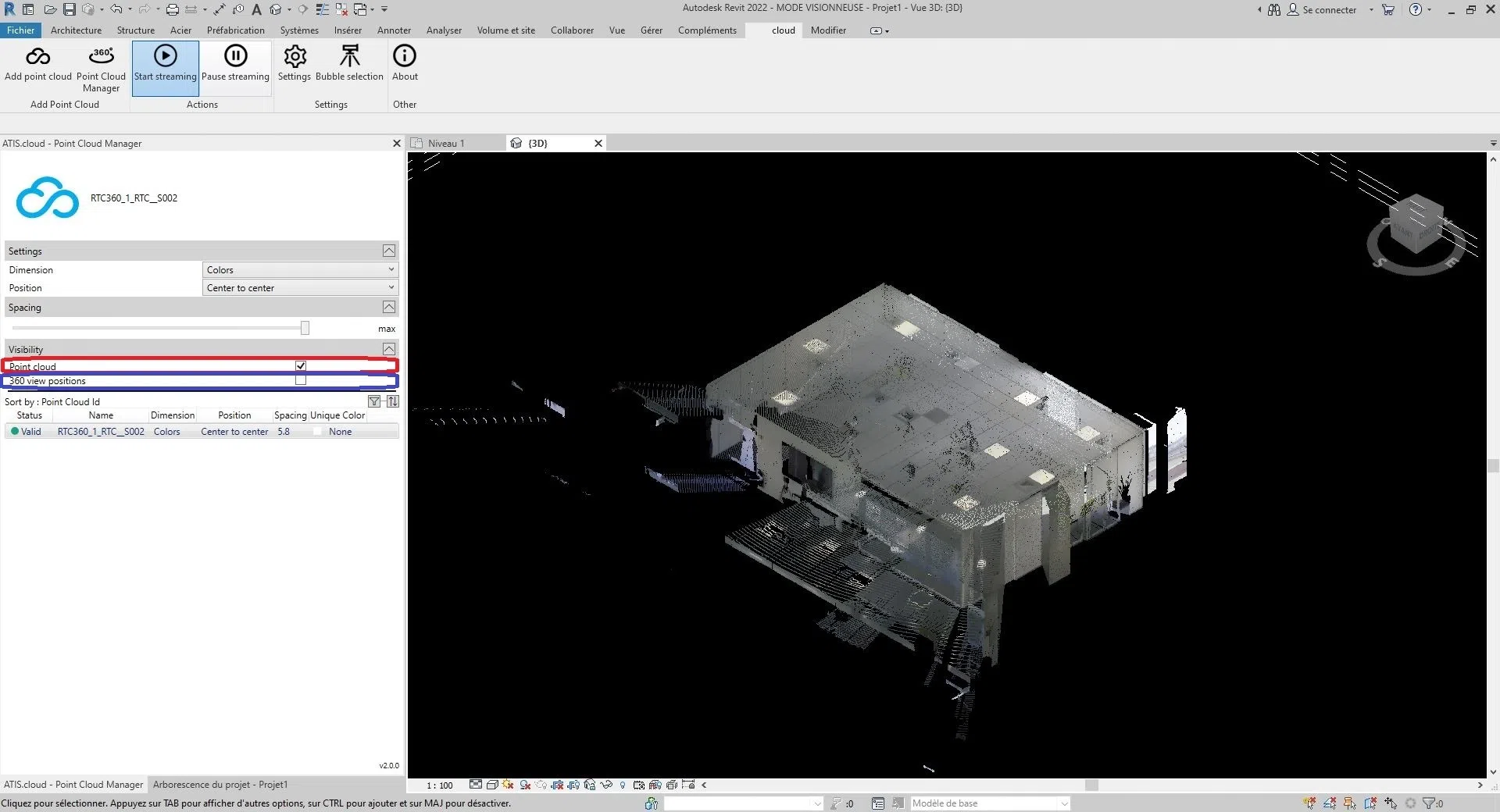
4: 点群およびスキャナーの可視性パラメーター(スキャナーに関する詳細は「Autodesk Revitスキャナー」記事を参照)。
5: Autodesk Revitプラグインを通じて挿入されたすべてのクラウド。これにより、各クラウドの主要なパラメーターを一目で確認し、分類することができます。
- トリック:
- 各セクションの右側にある矢印ボタンを使ってセクションを折りたたんだり展開したりできます。
- 「可視性」セクションとパート6の間にある黒いバーを押し下げてマウスを動かすことで、パート6と残りの間のサイズを変更できます。
これで、各点群の各パラメーターを変更できるようになりました。
- クラウドの寸法は「寸法を変更」セクションへ;
- クラウドの位置は「位置を編集」セクションへ;
- クラウドのポイント間隔は「間隔を変更」セクションへ;
- クラウドまたはスキャナーの可視性は「可視性を変更」セクションへ。
選択した寸法を変更するには、「寸法」の右側にある選択ボックスをクリックします。
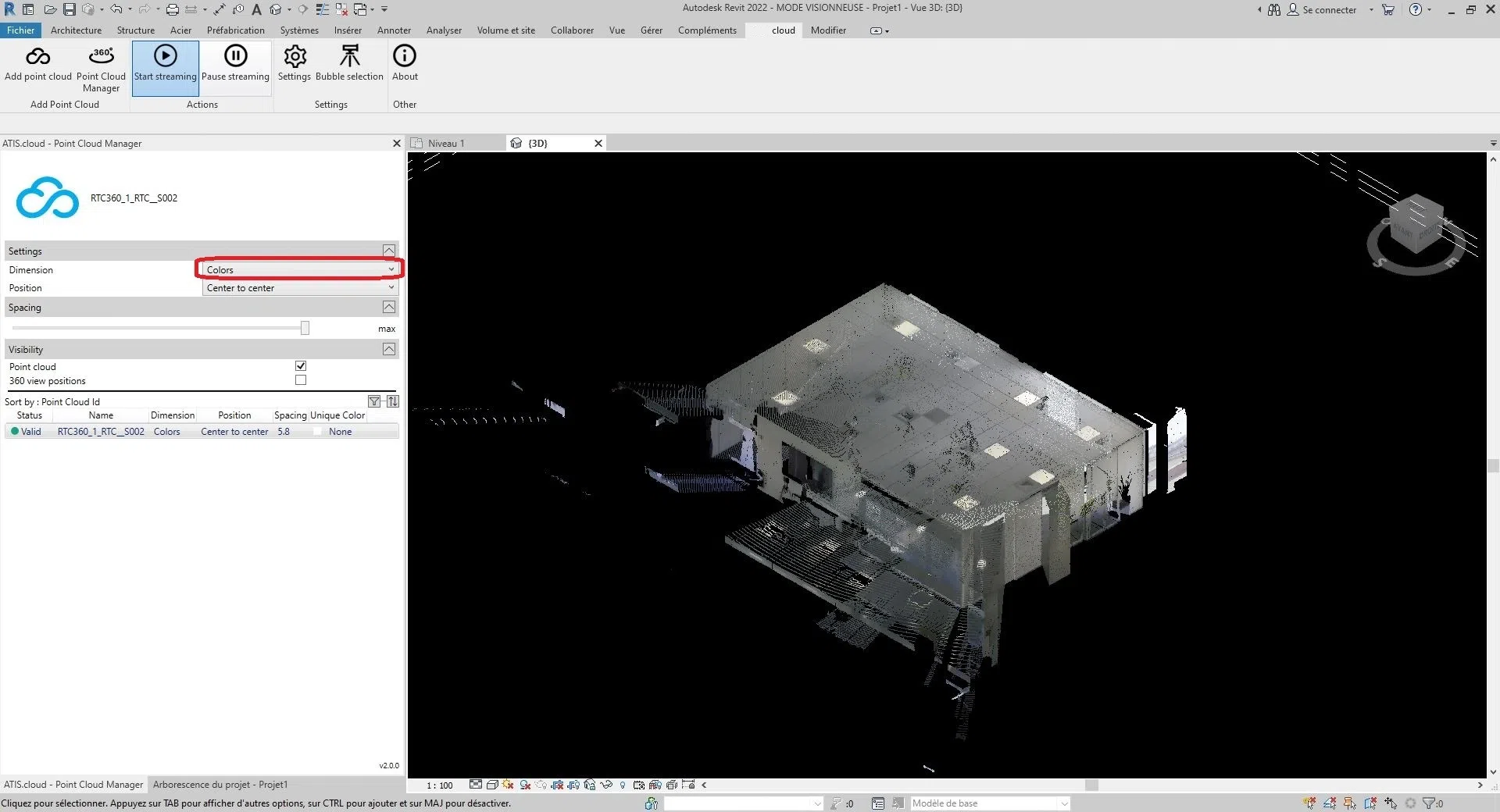
選択できるサイズは六種類です:
色、強度、分類、高さ、ポイントソースID、ユニークカラー。
- 色 : 点群内の各ポイントの色を表現するために使用されます。赤、緑、青のチャンネルがポイントの色を表現し、アルファチャンネルが点の透明度や不透明度を示します。LiDAR点群における色の使用は、視覚化や解釈の目的で有用であり、ポイントによって表される物体や表面の特性に関する追加情報を提供します。例えば、植生マッピングでは、ポイントの色を使って異なる種類の植生を区別したり、高いまたは低い植生密度の地域を特定したりできます。
- 強度 : ポイントが取得されたときのセンサーまたはデバイスによって受信された信号の強さまたは振幅を表します。場合によっては、強度はそのポイントでの物体の反射率に関連します。例えば、LiDAR点群では、強度値は物体がセンサーに反射したレーザー光の量を表します。この場合、高い強度値はより多くの光を反射する表面、例えば白い壁を示し、低い強度値は少ない光を反射する表面、例えば黒い車を示します。他の場合では、強度は異なる物理的量を示すかもしれません。例えば、写真の点群では、強度は点群を生成するために使用された元の画像のピクセルの明るさを表すことがあります。
- 分類 : 互換性のある点群でのみ動作します。分類の目的は、土壌、植生、建物、その他の物体など、類似したポイントを意味のあるカテゴリーにグループ化することです。
- 高さ : 各ポイントの高さまたは垂直位置を表します。標高データは、地形のマッピング、洪水モデル、都市計画、インフラ設計など多くの点群のアプリケーションで重要です。標高データを分析することで、一連の地理空間分析や視覚化の目的に使用できる正確で詳細なデジタル標高モデル(DEM)を作成することが可能です。
- ポイントソースID : これは、ポイントを生成した特定のレーザーセンサーを特定します。LiDARシステム内の各レーザーセンサーには一意の識別子または番号があり、この情報は点群データに記録され、分析や品質管理を可能にします。ポイントソースの識別は、複数のLiDARセンサーが単一のシーンまたはエリアを取得する状況で特に有用です。どのセンサーが各ポイントを生成したかを特定することで、データの品質チェックを行い、異なるセンサー間でデータが正しく整列され、登録されていることを確認できます。このことは、複数のLiDARセンサーが異なる角度や視点からデータを取得することができる林業のようなアプリケーションにおいて特に重要です。当社のプラットフォームでは、ポイントソースIDはソース分析IDを保存するために使用され、ユーザーが点群内の各ポイントがどの分析に基づいているかを簡単に追跡できるようにします。例えば、3Dレーザーセンサーを用いて同じエリアに対して複数のスキャンが実施された場合、それぞれのスキャンに一意のスキャンIDが割り当てられ、クラウドポイント内の各ポイントのポイントソースID属性は対応するスキャンIDに設定されることができます。
- ユニークカラー : 「ユニークカラー」寸法の目的は、ユーザーが定義したユニークな色で点群を着色できるようにすることです。
選択した位置を変更するには、「位置」の右側にある選択ボックスをクリックします。
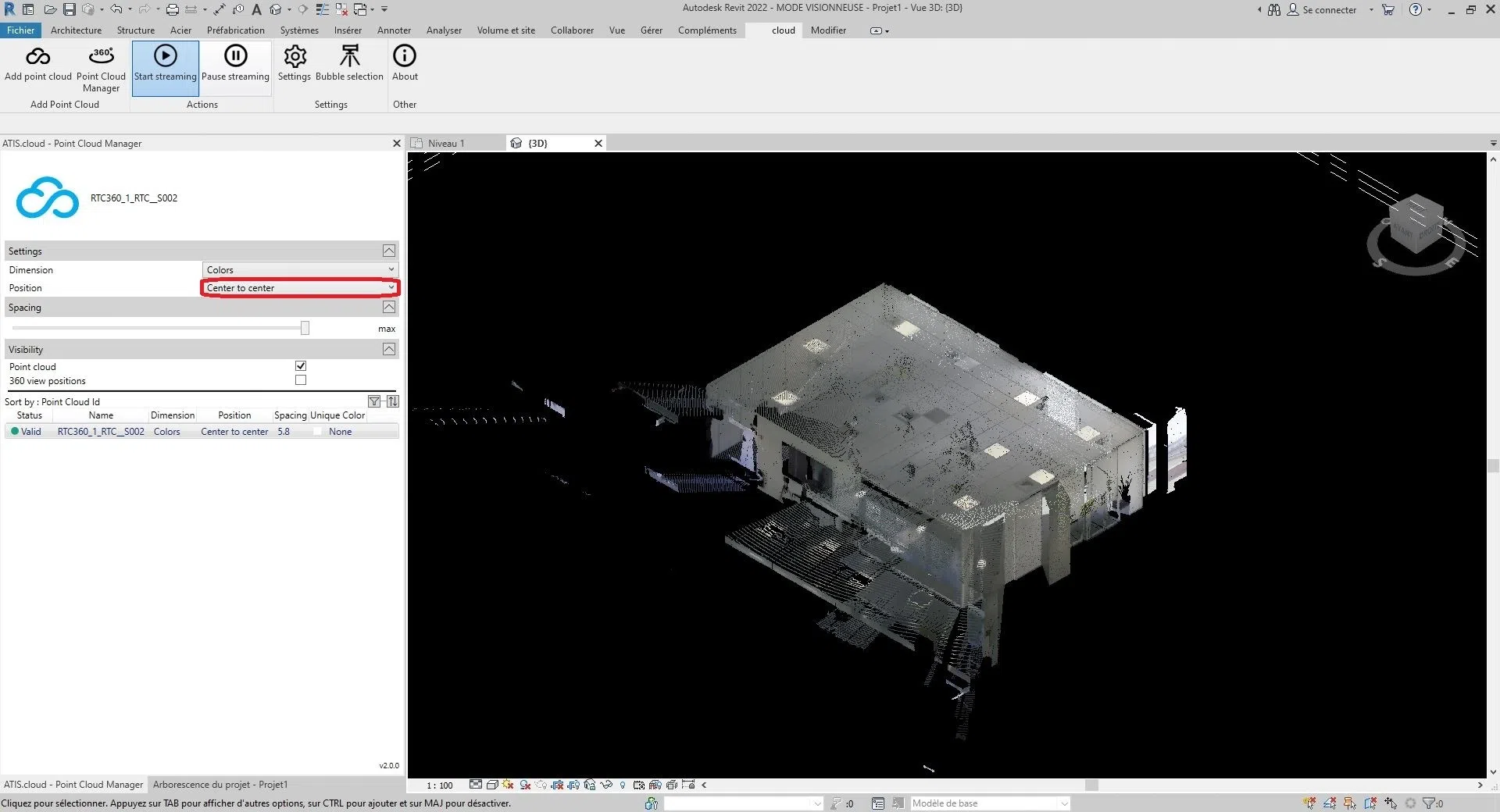
次の三つのオプションから選ぶことができます:
「中心に中心」、「内部の原点」、または「共有サイトにおいて」。
- 中心に中心 : このオプションは、ビューポートの中心を基準点として点群を配置します。
- 内部原点 : このオプションは、クラウドの内部原点を基準点として点群を配置します。内部原点は通常、点群自体の座標系によって定義されます。このオプションを使用すると、点群はAutodesk Revitプロジェクトの原点ではなく、その内部原点に基づいて配置されます。このことは、点群をその内部座標系に整列させる必要がある場合に便利です。
- 共有サイトにおいて : このオプションは、共有サイトの位置に点群を配置します。共有サイトは、複数のプロジェクトが基づくことができる共通の地理的場所を指します。このオプションを使用すると、点群は共有サイトの座標に基づいて配置されます。共通のサイトに基づくプロジェクトに取り組む際に、点群をその共有位置に整列させることが特に便利です。
- 自動 - 最後に配置されたものに原点を合わせる : Autodesk Revitは、次にインポートされた点群を以前にインポートされた点群と一貫して配置します。このオプションは、最初の点群を挿入した後に有効になります。最初のクラウドを動かしてモデルの要素に正しく整列させることができます。同じサイトおよび同じ座標系で作成された追加の点群がある場合は、追加の点群を挿入する際にこのオプションを使用することをお勧めします。新しい点群はその後、最初のものに対して適切に配置されます。
クラウドのポイント間の間隔を変更するには、「間隔」セクションのバーを移動させます。
可視性を変更するには、2つのオプションがあります。点群の表示/非表示を「点群」の右側にあるボックスをチェック/チェック解除することで行うことができます。「可視性」セクションの「360ビュー」の右側にあるボックスをチェック/チェック解除することで点群スキャナーを表示/非表示にできます。(可視性はプロジェクトの異なるビュー間で同じです)
- ヒント:
- スキャナー情報は「 バブル管理 」カテゴリーにあります。
- 3Dアプリケーションで点群をズームインするには、対応するクラウドをダブルクリックしてください。
おめでとうございます! 「点群マネージャー」インターフェースについてすべて知っています。
何か問題が発生した場合は、サポートチームがお手伝いします。楽しく探索してください!