Autodesk Revitプラグイン - 点群を挿入する
お使いのコンピュータにAutodesk Revitプラグインがインストールされていない場合は、まず「 Autodesk Revitプラグイン - インストール 」の記事に移動して、この操作が完了した後にこちらに戻ってきてください。
これらのプラグインを使用すると、プラットフォーム上で任意の点群を提供できます。まず、メインメニューからプロジェクトの画像をクリックしてプロジェクトを開いてください。利用可能なプロジェクトがない場合は、「 プロジェクトを作成 」の記事に移動してください。
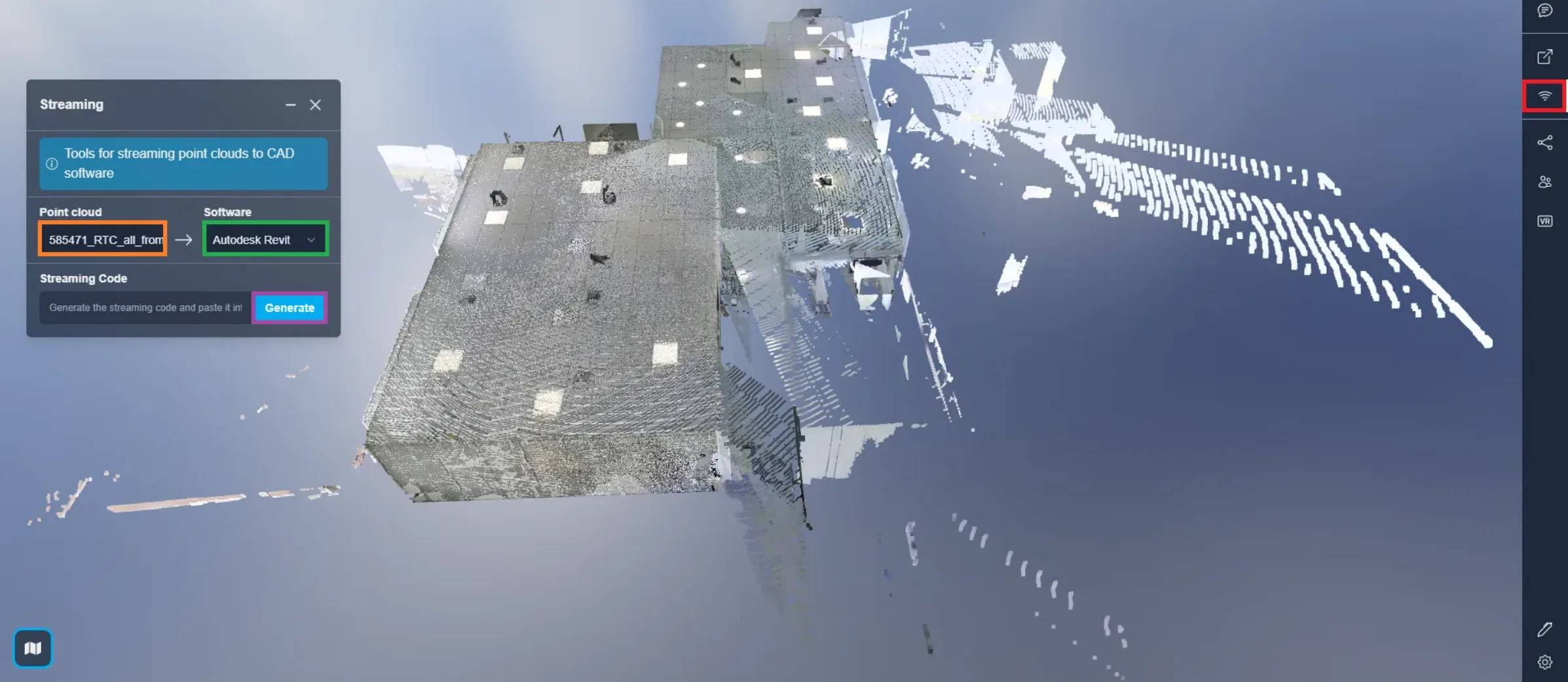
プロジェクトを開いたら、ストリーミングボタンをクリックすると、リンクされたウィンドウが開きます。次に、使用したいクラウドを選択し、選択したソフトウェアがAutodesk Revitであることを確認してから、生成をクリックします。
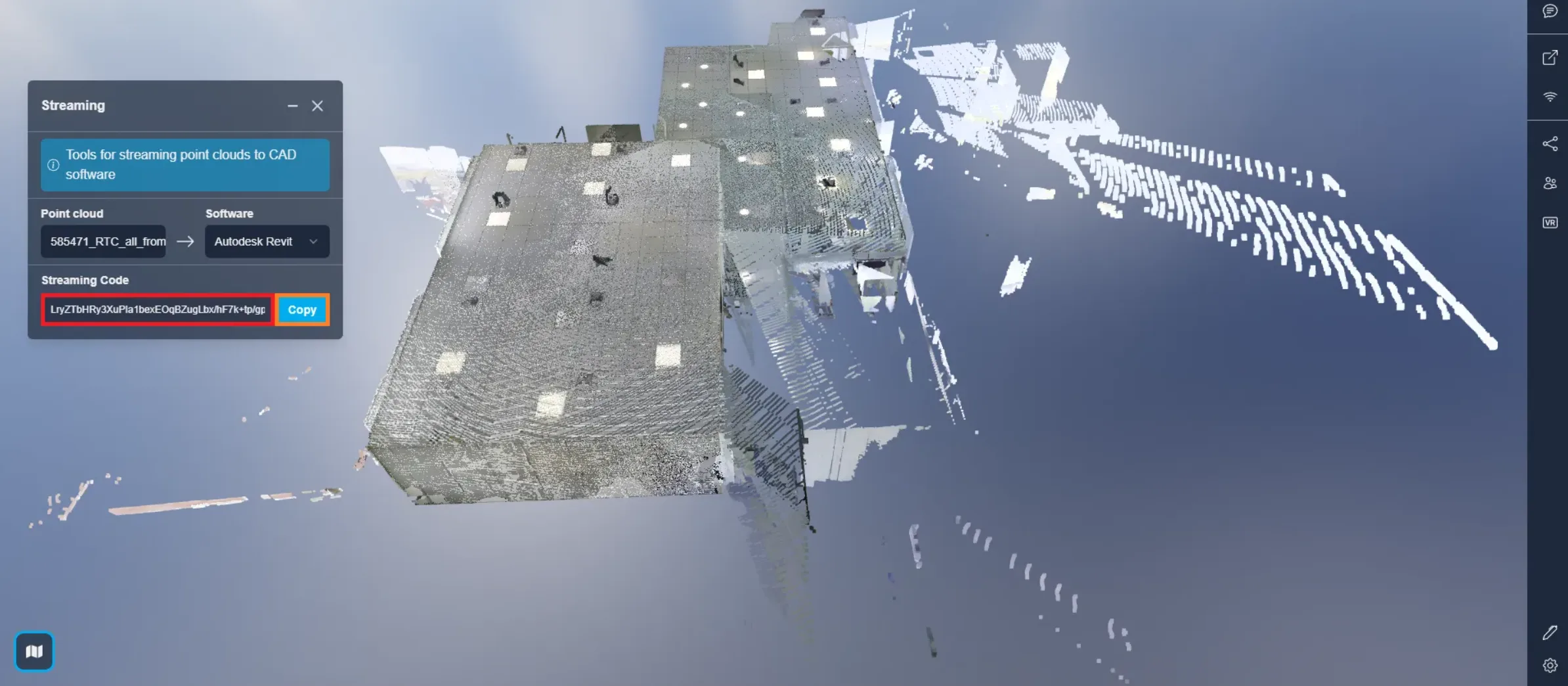
コードをコピーするには、コピー ボタンをクリックしてください。
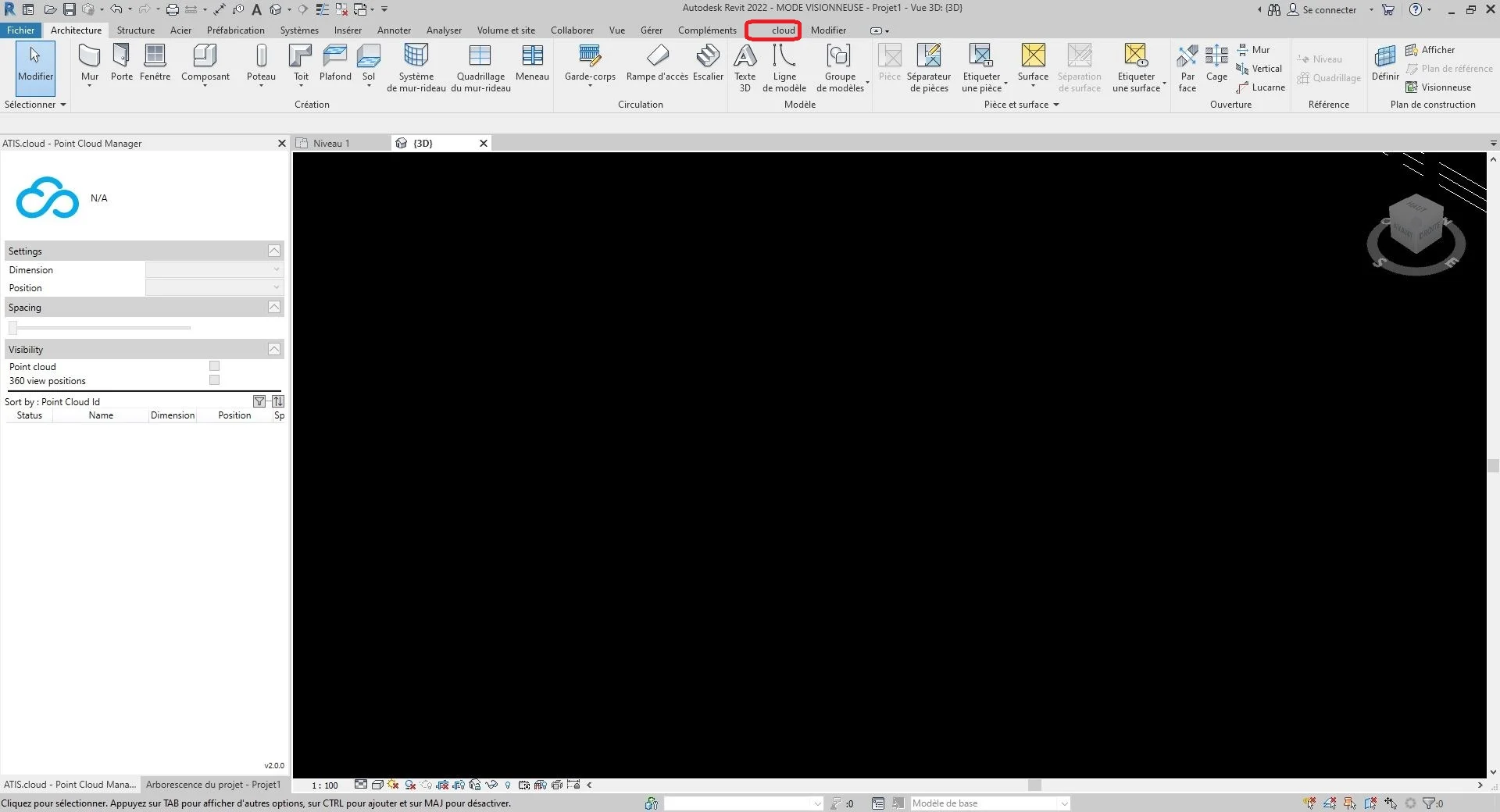
次に、前に追加したプラグインを使用してAutodesk Revitを開きます。まだ追加されていない場合は、「 Autodesk Revitプラグインのインストール」カテゴリーに移動してください。
Autodesk Revitプロジェクト内で、ツールバーの上部にある「クラウド」をクリックします。
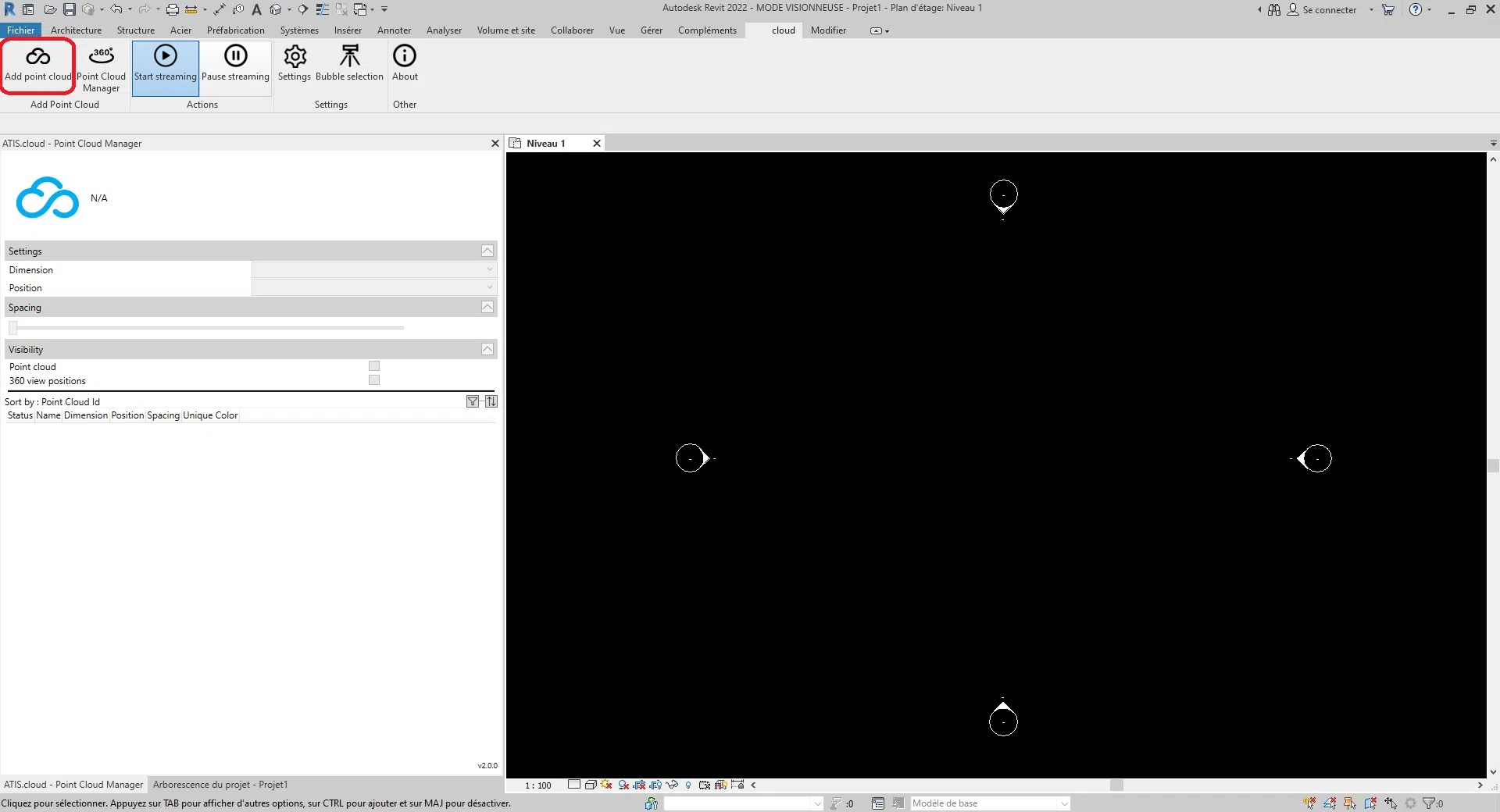
 ツールバーの上部にある「点群の追加」カテゴリーの「クラウドストリーマー」をクリックします。
ツールバーの上部にある「点群の追加」カテゴリーの「クラウドストリーマー」をクリックします。
 この操作が終わると、画面にダイアログボックスが表示されます。ゴミ箱ボタンの右にあるノートパッドアイコンをクリックしてください。
この操作が終わると、画面にダイアログボックスが表示されます。ゴミ箱ボタンの右にあるノートパッドアイコンをクリックしてください。
なお、サイトから生成されたコードは「ストリーミングコード」と呼ばれ、Autodesk Revitの「アクセスコード」フィールドに対応しています。さらに、このフィールドはいつでもゴミ箱ボタンをクリックすることで削除できます。

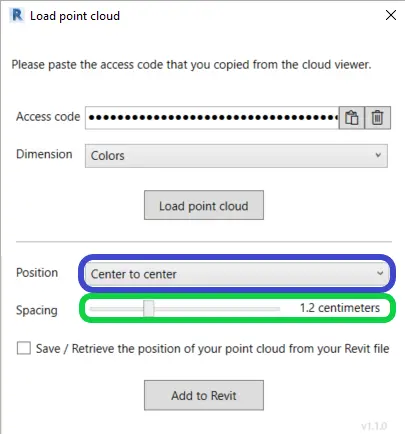
次に、点群の次元を設定できます。この次元は、表示の種類を示します。
なお、すべての点群設定は、追加後でも「点群マネージャー」のおかげで変更可能です。\
現在、互換性のある5種類の次元タイプがあります。
- 色 : 各ポイントの色を表すために使用されます。赤、緑、青のチャンネルはポイントの色を表し、アルファチャンネルはポイントの透明度または不透明度を表します。LiDAR点群における色の利用は、視覚化や解釈の目的に役立ち、ポイントで表される物体や表面の特性についての追加情報を提供します。例えば、植生マッピングでは、ポイントの色を使用して異なる種類の植生を区別したり、高いまたは低い植生密度のエリアを特定したりできます。
- 強度 : ポイントがキャプチャされた時にセンサーやデバイスによって受信された信号の強さまたは振幅を表します。場合によっては、強度はそのポイントでの物体の反射率に関連していることがあります。例えば、LiDAR点群の場合、強度値は物体によってセンサーに反射されたレーザー光の量を表します。この場合、高い強度値は白い壁のようにより多くの光を反射する表面を示し、低い強度値は黒い車のようにあまり光を反射しない表面を示します。他の場合、強度は異なる物理量を表すこともあります。例えば、フォトグラフィック点群では、強度は点群を生成するために使用された元の画像のピクセルの明るさを表すことがあります。
- 分類 : 互換性のある点群でのみ機能します。分類の目的は、土壌、植生、建物、およびその他の物体など、類似のポイントを意味のあるカテゴリーにグループ化することです。
- 高さ : 各ポイントの高さまたは垂直位置を表します。標高データは、地形マッピング、洪水モデリング、都市計画、インフラ設計など、多くの点群アプリケーションで重要です。
- ポイントソースID : このIDは、ポイントを生成した特定のレーザーセンサーを識別します。LiDARシステムの各レーザーセンサーには一意の識別子または番号があり、この情報はデータ分析や品質管理を可能にするために点群データに記録されます。ポイントソースの識別は、複数のLiDARセンサーを使用して単一のシーンやエリアをキャプチャする場合に特に便利です。どのセンサーが各ポイントを生成したかを特定することで、データの品質をチェックし、異なるセンサー間でデータが正しく整列および登録されているかを確認できるのです。これは、異なる角度や視点からデータをキャプチャするために複数のLiDARセンサーを使用する場合に特に重要です。当社のプラットフォームでは、ポイントソースIDはソース分析IDを格納するために使用され、ユーザーが点群内の各ポイントがどの分析から派生したかを簡単に追跡できるようにします。たとえば、同じエリアに対して3Dレーザースキャナーを使用して複数のスキャンを行った場合、各スキャンに一意のスキャンIDを割り当て、その後点群内の各ポイントのポイントソースID属性を対応するスキャンIDに設定できます。
希望する次元を選択するには、「次元」のテキストの右側にある選択矩形をクリックしてください。

「点群をロード」をクリックして点群データを初期化します。

Autodesk Revitの挿入設定をお好みに変更します。「間隔」スライダーでポイント間の間隔を調整し、プロジェクト内の点群の位置を、次の3つのオプションのいずれかから選択してください:「センター対センター」、「内部原点」、または「共有サイトの位置」。
- センター対センター : このオプションは、ビューポートの中心を基準点として点群を配置します。
- 内部原点 : このオプションは、クラウドの内部原点を基準点として点群を配置します。内部原点は通常、点群自体の座標系によって定義されます。このオプションを使用すると、点群はAutodesk Revitプロジェクトの原点ではなく、自身の内部原点に基づいて配置されます。このため、内部座標系に整列させたい場合に便利です。
- 共有サイトの位置 : このオプションは、共有サイトの位置に点群を配置します。共有サイトとは、複数のプロジェクトの基礎となる共通の地理的位置です。このオプションを使用すると、点群は共有サイトの座標に基づいて配置されます。共通のサイトに基づくプロジェクトで作業している場合、点群をその共有位置に整列させたいときに便利です。
- 自動 - 最後に配置されたものの原点 : Autodesk Revitは、次にインポートされる点群を以前にインポートされた点群と一致させます。このオプションは最初の点群を挿入した後に有効になります。例えば、モデル要素と正しく整列させるためにこの最初のクラウドを動かすことができます。同じサイトで最初のものと同じ座標系で作成された追加の点群がある場合は、追加の点群を挿入するためにこのオプションを使用することをお勧めします。新しい点群は、最初のものに対して正しく配置されます。
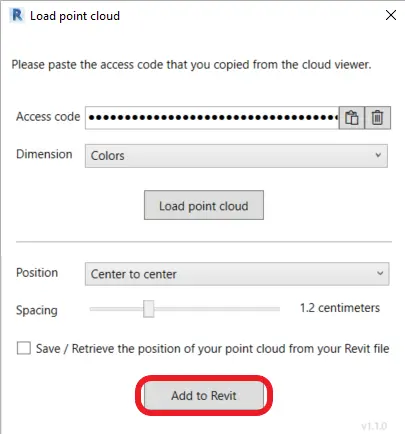
設定が完了したら、「Autodesk Revitに追加」をクリックして点群をAutodesk Revitに挿入します。
ツールバーの「アクション」カテゴリーに、ポイントストリーミングを開始するボタンと停止するボタンの2つがあります。
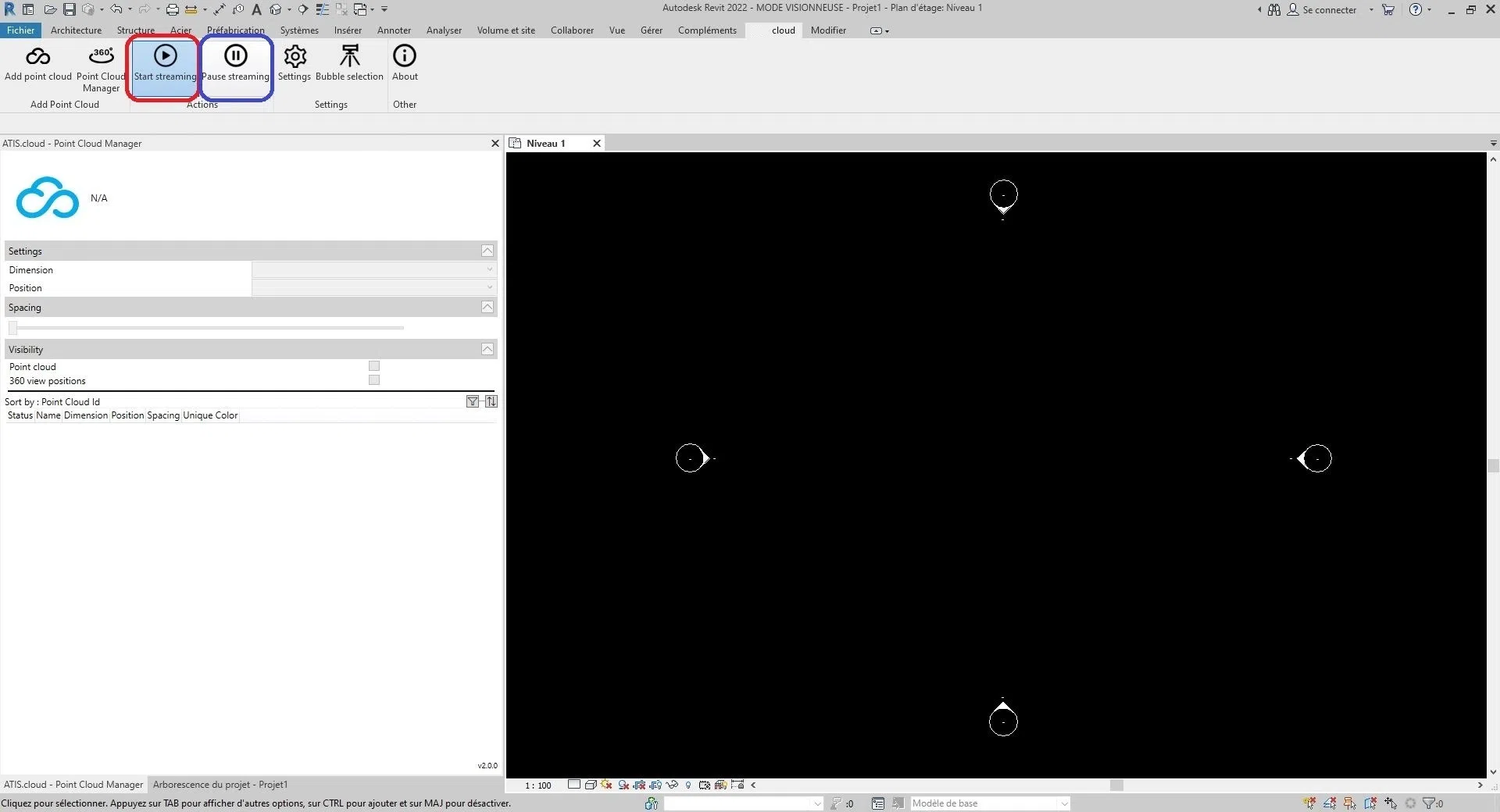 ポイントストリーミングは、一定の組織に従ってクラウドからポイントが少しずつ到着する機能です。ただし、この操作には常時インターネット接続が必要で、ホストマシンからの一定のリソースを必要とします。
ポイントストリーミングは、一定の組織に従ってクラウドからポイントが少しずつ到着する機能です。ただし、この操作には常時インターネット接続が必要で、ホストマシンからの一定のリソースを必要とします。
そのため、「ストリーミングを停止」をクリックして停止したり、「ストリーミングを開始」をクリックしてポイントストリーミングを再起動したりできます。
ストレージスペースのクリア:コンピュータのディスク容量が満杯になると、プラグインが正常に動作しなくなる場合があります。そのため、「設定」ボタンをクリックして、Autodesk Revitプラグインのために予約されたストレージスペースをクリアすることができます。まず、「設定」をクリックしてください。
![]() 情報として、ポイントストリーミングを開始すると、クラウドはAutodesk Revitから視覚的に消えますが、これは正常です。点群は再表示されます(ポイントストリーミングを開始するにはポイントストリーミングの停止または開始セクションに移動してください)。
情報として、ポイントストリーミングを開始すると、クラウドはAutodesk Revitから視覚的に消えますが、これは正常です。点群は再表示されます(ポイントストリーミングを開始するにはポイントストリーミングの停止または開始セクションに移動してください)。
おめでとうございます!ストリーミングデータからAutodesk Revitに点群を挿入しました。
点群設定の管理に関する詳細については、「点群マネージャー」カテゴリーをご覧ください。
このウィンドウから、使用される最大のGPUメモリと、プラグインによって超えないべき最大のディスクスペースの値を指定することもできます。
Autodesk Revitにウェブプロジェクトソースを追加する方法については、「ソースを追加」カテゴリーをご覧ください。
問題が発生した場合は、サポートチームがお手伝いします。楽しく探索してください!
注意事項:Revitで点群にスナップすることは機能していません。これはバグではなく、Autodeskによって課された技術的制限です。