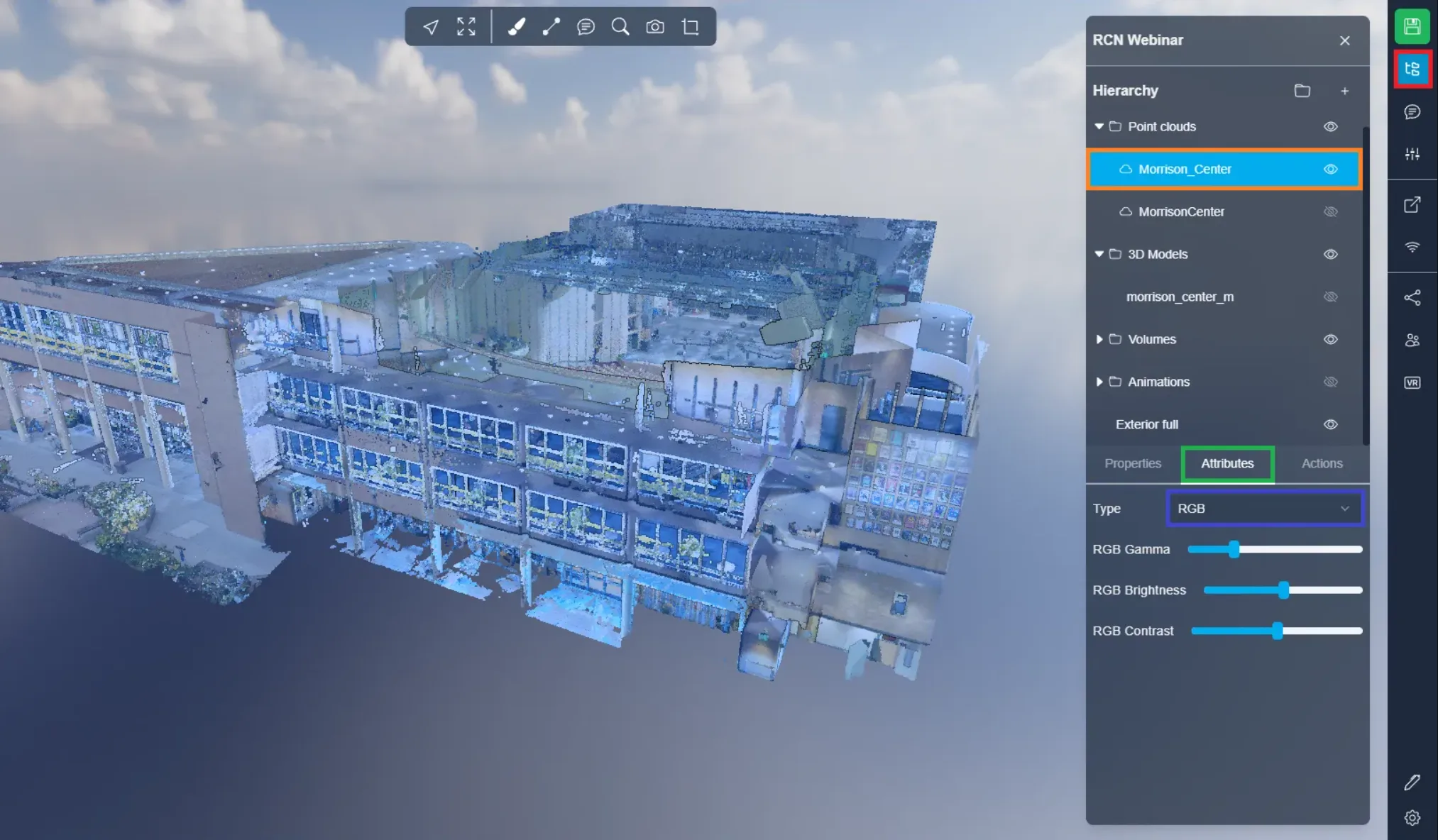
点群属性
点群の属性にアクセスするには、プロジェクトメニューを開き、対象の点群を選択します。属性タブをクリックすると、以下にすべての可能な属性を一覧にしたドロップダウンメニューが表示されます。使用したい属性を選択してください。すべての可能な属性とその機能については、以下にリストがあります。
-
分析: 分析用の点群でのみ機能します。分析について詳細を知りたい場合はこちらの記事をご覧ください。
- 名前:点群の名称を変更
- 位置を見る
- 回転を見る
- スケールを見る
- 分析を削除(3Dアプリケーションからのみ削除、サーバー側分析の場合は後で再ロード可能)
-
分類: 対応する点群でのみ機能します。分類の目的は、同じようなポイントを地面、植生、建物、その他のオブジェクトといった意味のあるカテゴリーにグループ化することです。
- 全て表示 / 非表示:すべてのカテゴリーを表示または非表示
- カテゴリーごとに1行が表示され、行をクリックすると表示 / 非表示が切り替わり、色をクリックすると変更可能
-
色: 点群全体を1つの色で色付け
- パレットを使用して色を選択
- 16進コードを使用して色を選択
- デフォルトリストから色を選択
-
合成: 複数のオプションを同時に使用する場合に使用し、スライダーをドラッグして使用量を調整します。
- RGBA:色付けされた点群
- ガンマ:点群の露出、ガンマが低いほど露出が高く、ガンマが高いほど露出が低く、夕日を見たような外観を与えます
- 明るさ:点群の明るさ、明るさが低いと暗くなり、明るいと明るくなります。
- コントラスト:点群のコントラストを変更します。低いコントラストでは点群が灰色になり、高いコントラストでは標準色がオーバーエクスポーズされます(赤、黄、緑、青...)
- 強度:信号の強度または量
- 範囲:低強度から高強度まで
- ガンマ:点群の露出、ガンマが低いほど露出が高く、ガンマが高いほど露出が低く、夕日を見たような外観を与えます
- 明るさ:点群の明るさ、明るさが低いと暗くなり、明るさが高いと明るくなります。
- コントラスト:点群のコントラストを変更します。低いコントラストでは点群が灰色になり、コントラストが高いと既定色(赤、黄、緑、青...)がオーバーエクスポーズされます。
- 高度:各ポイントの高さまたは垂直位置
- 高度範囲:高度に関してグラデーションの開始と終了を設定
- グラデーションモード
- クランプ:標準のグラデーション、範囲外ではエッジの最終色を保持
- リピート:グラデーションが終了すると、元の色から再度開始
- ミラーレピート:グラデーションが終了すると逆にしたグラデーションを別に適用、リピートに似ていますが色の不連続性はありません
- グラデーションスキーム:グラデーションの色を変更、あらかじめ定義されたリストから選択するのみ
- 分析:その点群で使用可能な場合のみ、モデルと点群の比較
- 分類:その点群で使用可能な場合のみ、地面、植生、建物などの異なるタイプのオブジェクトを分類
- リターンナンバー:そのポイントを取得するために必要なパルスの量
- ポイントソースID:スキャンIDごとに分類
- RGBA:色付けされた点群
-
高度: 各ポイントの高さまたは垂直位置を表します。高度データは、地形図作成、洪水モデリング、都市計画、インフラ設計など、点群の多くの用途で重要です。高度データを分析することで、さまざまな地理空間の分析および視覚化目的のために使用される正確かつ詳細なデジタル標高モデル(DEM)を作成できます。
- 高度範囲:高さのグラデーションの開始と終了を設定
- グラデーションモード
- クランプ:標準のグラデーション、範囲外ではエッジの最終色を保持
- リピート:グラデーションが終わると、元の色から再度開始
- ミラーレピート:グラデーションが終わると、反転された新しいグラデーションを適用、リピートに似ていますが色の不連続性はありません
- グラデーションスキーム:あらかじめ定義されたリストから選んでグラデーションの色を変更
-
GPS時間: GPS時間は点群の各ポイントに関連付けられた重要な属性です。これにより、レーザーパルスが発射された時刻や反射パルスが受信された時刻の情報を提供し、ポイントのレンジと位置を正確に計算することができます。また、GPS時間は品質管理および分析の目的にも使用されます。点群内のGPS時間値の分布を分析することにより、データやLiDARシステムに問題がある場合にこの問題を示す時間的な異常やエラーを特定することができます。
-
指標: 指標は点群内の各ポイントに関連付けられており、ポイントの空間特性およびクラウド内の他のポイントとの関係に関する追加情報を提供します。これらはセグメンテーション、分類、フィーチャ抽出などの高度な分析および処理タスクをサポートするために使用されます。LiDAR点群の処理では、次のような指標が使用されます:
- 法線ベクトル:この指標は、ローカルな近隣に対するポイントの向きを表します。平面サーフェスを特定したり、サーフェス再構成のための法線を推定するために使用できます。
- 曲率:この指標は、ポイントの位置での表面の局所的な曲率を表します。シャープエッジを特定したり、曲面の曲率の半径を推定するために使用できます。
- 地上からの高さ:この指標は、地面または参照面に対するポイントの高さを表します。地形モデリングや、地面より上または下にあるオブジェクトを特定するために使用できます。
- 相対高さ:この指標は、近傍ポイントに対するポイントの高さを表します。周囲より高いまたは低いオブジェクトを特定するために使用できます。
- 密度:この指標は、ポイントのローカルな近隣におけるポイントの密度を表します。植生や建物のファサードのように、高密度または低密度のポイント領域を特定するために使用できます。
-
強度: これは、ポイントがキャプチャされたときにセンサーやデバイスによって受信された信号の強さまたは大きさを表します。一部のケースでは、強度はそのポイントでのオブジェクトの反射率に関連付けられています。たとえば、LiDAR点群では、強度値はオブジェクトからセンサーに反射されたレーザー光の量を表します。この場合、強度値が高いほど光を多く反射する表面を示し、たとえば白い壁が該当し、強度値が低いほど光を少なく反射する表面、たとえば黒い車が該当します。他のケースでは、強度は異なる物理量を表すことがあります。たとえば、写真点群では、強度は点群を生成するために使用された元の画像のピクセルの明るさを表すことがあります。
- 範囲:低い強度から高い強度まで
- ガンマ:基本的に点群の露出度、ガンマが低いほど露出が高く、ガンマが高いほど露出が低く、夕焼けのような外観を与えます
- 明るさ:点群の明るさ、明るさが低ければ暗くなり、明るければ明るくなります。
- コントラスト:点群のコントラストを変更します。コントラストが低ければ点群は灰色になり、高ければ既定の色(赤、黄、緑、青...)が過剰露出されます。
-
強度グラデーション: これは点群内の隣接するポイント間の強度の変化を示します。距離または位置に対する強度変化の程度を表します。強度グラデーションは、点群内の強度値を用いた微分を取得して計算します。これには、x, y, zの各座標に関する強度値の部分微分を計算することが含まれます。各ポイントのグラデーションベクトルの大きさが強度グラデーション値を示します。強度グラデーションの値が高い場合は鋭いエッジや境界を示し、低い場合は滑らかなまたは緩やかな変遷を示します。
- 範囲:低い強度から高い強度まで
- ガンマ:基本的に点群の露出、ガンマが低ければ露出が高くなり、ガンマが高ければ露出が低くなり、夕焼けのような外観を提供します
- 明るさ:点群の明るさ、明るさが低ければ暗くなり、明るければ明るくなります。
- コントラスト:点群のコントラストを変えます。コントラストが低いと、点群はグレーになります。コントラストが高いと、標準的な色(赤、黄、緑、青...)が過剰露出されます。
-
詳細レベル: LiDAR点群処理において、詳細レベル(LOD)は点群内のポイント密度、データの解像度、データの表現に使用される抽象化のレベルを指すことがあります。たとえば、詳細レベルが高い点群は、ポイント密度が高く、解像度が高く、抽象化のレベルも細かいものとなります。反対に、詳細レベルが低い点群は、ポイント密度が低く、解像度が低く、抽象化のレベルも粗くなります。
-
Matcap: LiDAR点群処理において、matcapは点群から作成された3Dモデルに視覚的なテクスチャや陰影効果を追加するのに使用されることがあります。3Dモデルにmatcapテクスチャを適用することで、よりリアルで視覚的に魅力的なシーンの表現を作成することが可能です。たとえば、matcapテクスチャを使用してコンクリート壁や木の樹皮の外観をシミュレートし、3Dモデルに深みとリアルさを加えることができます。
- 適用するテクスチャを選択
-
リターン数: それぞれのポイントをキャプチャするために発射され戻ったレーザーパルスの総数を表します。リターンナンバーに似ていますが、リターン数は通常1から5以上までの値であり、LiDARシステムによってはそれ以上にもなることがあります。リターンの総数は、スキャンされるオブジェクトやシーンの複雑さや構造についての情報を提供します。たとえば、リターン数が高いポイントは、複数の層や複雑なジオメトリを持つオブジェクト(樹冠や建物のファサードなど)を示す可能性があります。
-
ポイントソースID: ポイントを生成した特定のレーザーセンサーを識別します。LiDARシステム内の各レーザーセンサーは一意のIDまたは番号を持ち、この情報はデータ分析と品質管理のために点群データ内に記録されます。複数のLiDARセンサーを使用して単一のシーンまたはエリアをキャプチャする状況において、ポイントソースIDは特に有用です。各ポイントを生成したセンサーを特定することで、データに対する品質管理チェックを実行し、異なるセンサー間でデータが正しく位置合わせされていることを確認できます。例えば、林業のアプリケーションでは、複数のLiDARセンサーを使用して異なる角度や視点からデータをキャプチャすることがあるため、これが重要です。当社のプラットフォームでは、ポイントソースIDを使用して、スキャンIDを格納します。これにより、ユーザーは点群内の各ポイントがどのスキャンから来たかを簡単に追跡することができます。たとえば、同じエリアの複数のスキャンが3Dレーザースキャナを使用して取得された場合、各スキャンには一意のスキャンIDが割り当てられ、点群内の各ポイントのポイントソースID属性は対応するスキャンIDに設定されます。
-
RGBA: 点群内の各ポイントの色を表すために使用されます。赤(R)、緑(G)、青(B)の各チャネルはポイントの色を表し、アルファ(A)チャネルはポイントの透明度または不透明度を表します。LiDARの点群における色の使用は、可視化や解釈の助けとして役立つことがあります。たとえば、植生のマッピングでは、ポイントの色は植生の異なるタイプを区別したり、植生密度が高いか低いエリアを特定するために使用できます。
- ガンマ:基本的に点群の露出、ガンマが低ければ露出が高く、ガンマが高ければ露出が低く、夕焼けのような外観を提供します
- 明るさ:点群の明るさ、明るさが低ければ暗くなり、明るければ明るくなります。
- コントラスト:点群のコントラストを変えます。コントラストが低いと、点群はグレーになります。コントラストが高いと、標準的な色(赤、黄、緑、青...)が過剰露出されます。
-
リターンナンバー: 特定のポイントをキャプチャするために発射され戻ったレーザーパルスの回数を表します。リターン数に似ていますが、リターンナンバーは通常1から5までの値で、1は初めのリターン、5は5番目のリターンを示します。最初のリターンはオブジェクトの上位の表面から反射されたレーザーパルスを表し、それ以降のリターンはより低い表面またはオブジェクト内の複数の反射を示す可能性があります。
-
スキャンアングルランク: 特定のポイントをキャプチャするためにレーザーパルスが発射された際のレーザービームとスキャナの基準線との間の角度を表します。スキャンアングルランクは、ポイントがキャプチャされた際の角度に関する情報を提供し、0はスキャナの基準線を示し、正または負の値は基準線からの偏差を示します。建物の抽出では、スキャンアングルランクはスキャナの基準線に対する方位を基にして建物の外壁や屋根構造を特定するために使用できます。道路面の分析では、スキャンアングルランクは道路面に対するスキャナの角度に基づいて表面の欠陥や不規則性を検出するために使用される可能性があります。
-
ユーザーデータ: 点群にXYZ座標、強度、リターンナンバーといった標準的な属性以外の追加情報を付加することを可能にします。ユーザーデータはRGB色値、分類ラベル、ポイントに関連付けられたメタデータなど、さまざまな情報を記録するために使用されることがあります。例えば、ユーザーデータは、ポイントが建物の一部、木、または道路の一部であるかどうかを示したり、ポイント測定の品質やその不確実性に関する情報を保存するために使用されることがあります。ユーザーデータの使用は、ユーザーの具体的なニーズとアプリケーションに依存します。オブジェクト認識、分類、セグメンテーション、マッピングなど、さまざまなタスクに使用される可能性があります。点群にカスタマイズされたユーザーデータを追加することで、より意味のある情報を抽出し、より高度な分析および処理タスクを実行することが可能になります。
最初に表示される点群が正しく表示されていない場合は、最も一般的に使用されているRGBAまたは強度属性を試してください。
点群のプロパティについては、こちらの記事をご覧ください。
問題が発生した場合は、サポートチームがお手伝いします。楽しく探索してください!