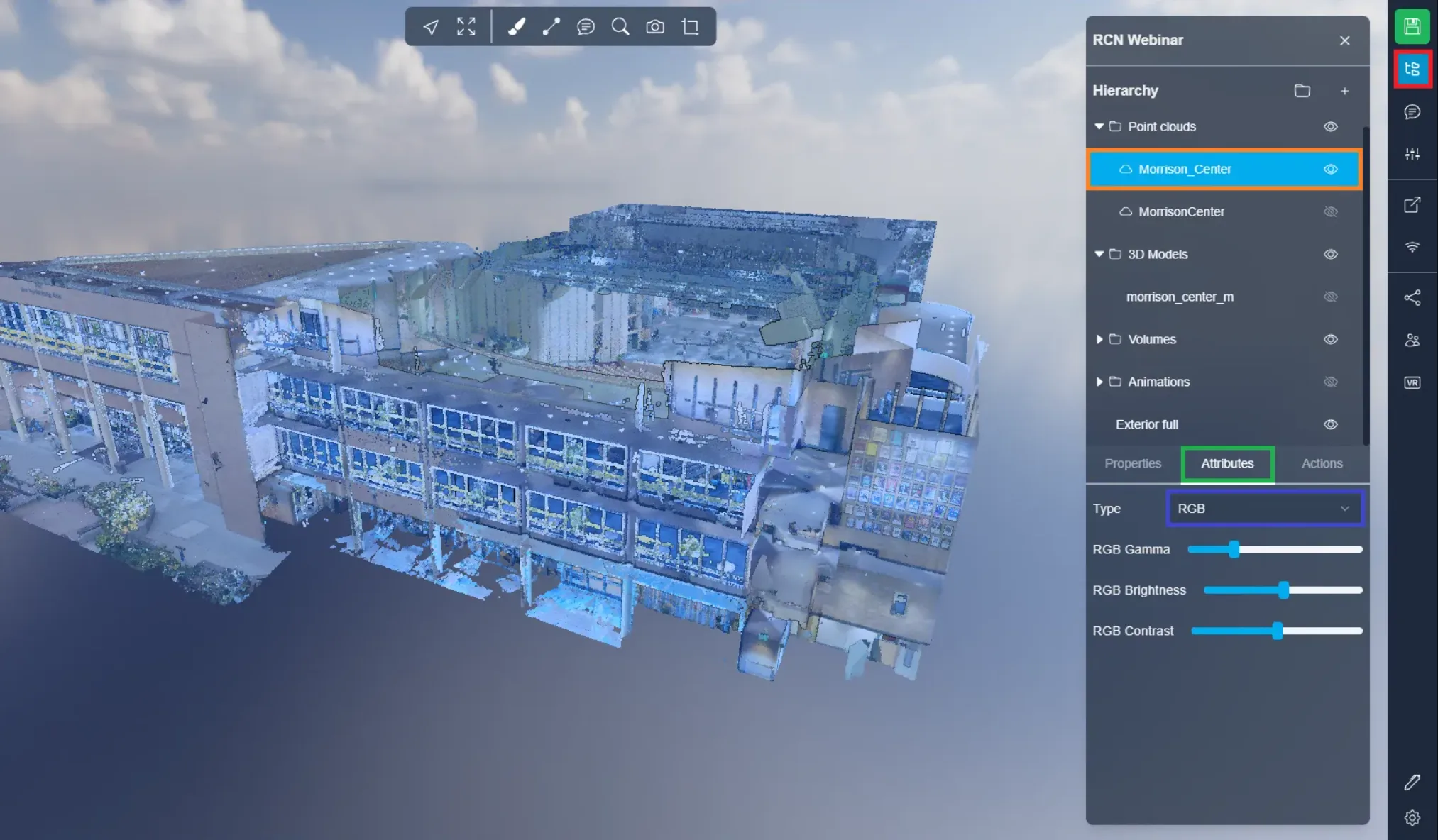
Attributi della nuvola di punti
Per accedere agli attributi di una nuvola di punti, apri il menu del progetto e seleziona la tua nuvola di punti. Clicca sulla scheda Attributi, qui sotto troverai un menu a discesa che elenca tutti gli attributi possibili; seleziona quello che desideri utilizzare. Troverai un elenco di tutti gli attributi possibili e la loro descrizione qui sotto.
-
Analisi: Funziona solo con nuvole di punti di analisi; per ulteriori informazioni sulle analisi, consulta questo articolo.
- Nome: Cambia il nome della nuvola di punti
- Vedi la posizione
- Vedi la rotazione
- Vedi la scala
- Elimina l'analisi (verrà eliminata solo dall'applicazione 3D, potrà essere ricaricata successivamente se si tratta di un'analisi lato server)
-
Classificazione: Funziona solo con nuvole di punti compatibili. L'obiettivo della classificazione è raggruppare punti simili in categorie significative, come terreno, vegetazione, edifici e altri oggetti.
- Mostra/nascondi tutto: visualizza o nasconde ogni categoria
- Una linea per categoria, clicca sulla linea per mostrarla/nasconderla, clicca sul colore per cambiarlo
-
Colore: Colora l'intera nuvola di punti con 1 colore
- Seleziona un colore usando la tavolozza
- Usa un codice esadecimale per selezionare il colore
- Scegli uno dei colori dalla lista predefinita
-
Composito: Utilizza questa opzione se vuoi usare più opzioni contemporaneamente, trascina i cursori per aumentare/diminuire il loro uso.
- RGBA: Nuvola di punti colorata
- Gamma: Fondamentalmente l'esposizione della nuvola di punti, gamma bassa equivale a maggiore esposizione, gamma alta, minore esposizione, dà un aspetto di tramonto
- Luminosità: La luminosità della nuvola di punti, una luminosità più bassa lo renderà più scuro, una luminosità più alta lo renderà più chiaro.
- Contrasto: Cambia il contrasto della nuvola di punti, un contrasto più basso renderà la nuvola di punti grigio, un contrasto più alto sovraesporrà i colori standard (rosso, giallo, verde, blu...)
- Intensità: Forza o magnitudine del segnale
- Gamma: Fondamentalmente l'esposizione della nuvola di punti, gamma bassa equivale a maggiore esposizione, gamma alta, minore esposizione, dà un aspetto di tramonto
- Luminosità: La luminosità della nuvola di punti, una luminosità più bassa lo renderà più scuro, una luminosità più alta lo renderà più chiaro.
- Contrasto: Cambia il contrasto della nuvola di punti, un contrasto più basso renderà la nuvola di punti grigio, un contrasto più alto sovraesporrà i colori standard (rosso, giallo, verde, blu...)
- Elevazione: Altezza o posizione verticale di ciascun punto
- Intervallo di elevazione: imposta dove il gradiente inizia e finisce in termini di altezza
- Modalità gradiente
- Clamp: Gradiente standard, al di fuori dell'intervallo mantiene il colore finale del bordo
- Ripeti: Quando il gradiente finisce, riparte dal colore originale
- Ripeti specchio: Quando il gradiente finisce, introduce un nuovo gradiente invertito, simile a ripeti tranne per l'assenza di discontinuità di colore
- Schema di gradiente: Cambia i colori del gradiente, selezione da un elenco predefinito solo
- Analisi: Solo se disponibile su quella nuvola di punti, confronto modello-nuvola di punti
- Classificazione: Solo se disponibile su quella nuvola di punti, divide diversi tipi di oggetti (suolo, vegetazione, edifici...)
- Numero di ritorni: Quantità di impulsi necessari per ottenere quel punto
- ID sorgente del punto: Raggruppato per ID di scansione
- RGBA: Nuvola di punti colorata
-
Elevazione: Rappresenta l'altezza o la posizione verticale di ciascun punto. I dati di elevazione sono importanti in molte applicazioni delle nuvole di punti, come la mappatura topografica, la modellazione delle inondazioni, la pianificazione urbana e il design dell'infrastruttura. Analizzando i dati di elevazione, è possibile creare modelli digitali di elevazione (DEM) accurati e dettagliati che possono essere utilizzati per una vasta gamma di analisi geospaziali e scopi di visualizzazione.
- Intervallo di elevazione: imposta dove il gradiente inizia e finisce in termini di altezza
- Modalità gradiente
- Clamp: Gradiente standard, al di fuori dell'intervallo mantiene il colore finale del bordo
- Ripeti: Quando il gradiente finisce, riparte dal colore originale
- Ripeti specchio: Quando il gradiente finisce, introduce un nuovo gradiente invertito, simile a ripeti tranne per l'assenza di discontinuità di colore
- Schema di gradiente: Cambia i colori del gradiente, selezione da un elenco predefinito solo
-
Tempo GPS: Il tempo GPS è un attributo importante associato a ciascun punto nella nuvola di punti. Fornisce informazioni sul momento in cui l'impulso laser è stato emesso e sul momento in cui l'impulso di ritorno è stato ricevuto, consentendo il calcolo accurato della distanza e della posizione del punto. Inoltre, il tempo GPS può anche essere utilizzato per scopi di controllo qualità e analisi. Analizzando la distribuzione dei valori di tempo GPS nella nuvola di punti, è possibile identificare aree con anomalie temporali o errori, che possono indicare problemi con i dati o il sistema LiDAR.
-
Indici: Gli indici sono attributi associati a ciascun punto di una nuvola di punti LiDAR che forniscono ulteriori informazioni sulle proprietà spaziali del punto e sulle relazioni con altri punti nella nuvola. Spesso vengono utilizzati per supportare compiti di analisi e processamento avanzato, come segmentazione, classificazione ed estrazione delle caratteristiche. Esistono vari tipi di indici che possono essere utilizzati nel processamento delle nuvole di punti LiDAR, tra cui:
- Vettore normale: Questo indice rappresenta l'orientamento del punto rispetto al suo vicinato locale. Può essere utilizzato per identificare superfici piane o stimare normali superficiali per la ricostruzione delle superfici.
- Curvatura: Questo indice rappresenta la curvatura locale della superficie nel punto. Può essere utilizzato per identificare bordi taglienti o stimare il raggio di curvatura per superfici curve.
- Altezza sopra il suolo: Questo indice rappresenta l'altezza del punto sopra il suolo o una superficie di riferimento. Può essere utilizzato per modellare il terreno o identificare oggetti sopra o sotto la superficie del suolo.
- Altezza relativa: Questo indice rappresenta l'altezza del punto rispetto ai suoi punti vicini. Può essere utilizzato per identificare oggetti più alti o più bassi rispetto ai loro dintorni.
- Densità: Questo indice rappresenta la densità di punti nel vicinato locale intorno al punto. Può essere utilizzato per identificare aree con alta o bassa densità di punti, come vegetazione o facciate di edifici.
-
Intensità: Rappresenta la forza o la magnitudine del segnale che è stato ricevuto da un sensore o dispositivo quando il punto è stato acquisito. In alcuni casi, l'intensità è correlata alla riflettanza dell'oggetto in quel punto. Ad esempio, in una nuvola di punti LiDAR, il valore di intensità rappresenta la quantità di luce laser che è stata riflessa al sensore dall'oggetto. In questo caso, un valore di intensità più alto indicherebbe una superficie che riflette più luce, come un muro bianco, mentre un valore di intensità più basso indicherebbe una superficie che riflette meno luce, come un'auto nera. In altri casi, l'intensità può rappresentare una quantità fisica diversa. Ad esempio, in una nuvola di punti fotografici, l'intensità può rappresentare la luminosità di un pixel nell'immagine originale che è stata utilizzata per generare la nuvola di punti.
- Gamma: Fondamentalmente l'esposizione della nuvola di punti, gamma bassa equivale a maggiore esposizione, gamma alta, minore esposizione, dà un aspetto di tramonto
- Luminosità: La luminosità della nuvola di punti, una luminosità più bassa lo renderà più scuro, una luminosità più alta lo renderà più chiaro.
- Contrasto: Cambia il contrasto della nuvola di punti, un contrasto più basso renderà la nuvola di punti grigio, un contrasto più alto sovraesporrà i colori standard (rosso, giallo, verde, blu...)
-
Gradiente di intensità: È una misura della variazione di intensità tra punti vicini in una nuvola di punti. Rappresenta il tasso di variazione dell'intensità rispetto alla distanza o alla posizione. Il gradiente di intensità si calcola prendendo il gradiente dei valori di intensità nella nuvola di punti. Questo implica il calcolo delle derivate parziali dei valori di intensità rispetto alle coordinate x, y e z di ciascun punto. La magnitudine del vettore gradiente in ciascun punto rappresenta il valore del gradiente di intensità. Alti valori di gradiente di intensità indicano bordi netti o confini, mentre valori bassi indicano transizioni lisce o graduali.
- Gamma: Fondamentalmente l'esposizione della nuvola di punti, gamma bassa equivale a maggiore esposizione, gamma alta, minore esposizione, dà un aspetto di tramonto
- Luminosità: La luminosità della nuvola di punti, una luminosità più bassa lo renderà più scuro, una luminosità più alta lo renderà più chiaro.
- Contrasto: Cambia il contrasto della nuvola di punti, un contrasto più basso renderà la nuvola di punti grigio, un contrasto più alto sovraesporrà i colori standard (rosso, giallo, verde, blu...)
-
Livello di dettaglio: Nel processamento delle nuvole di punti LiDAR, il Livello di Dettaglio (LOD) può riferirsi alla densità di punti nella nuvola di punti, alla risoluzione dei dati o al livello di astrazione utilizzato per rappresentare i dati. Ad esempio, una nuvola di punti con un alto livello di dettaglio avrebbe un'alta densità di punti, un'alta risoluzione e un fine livello di astrazione. Al contrario, una nuvola di punti con un basso livello di dettaglio avrebbe una densità di punti inferiore, una risoluzione più bassa e un livello di astrazione grossolano.
-
Matcap: Nel processamento delle nuvole di punti LiDAR, il matcap può essere utilizzato per aggiungere texture visive ed effetti ombra ai modelli 3D creati da nuvole di punti. Applicando una texture matcap a un modello 3D, è possibile creare una rappresentazione più realistica e esteticamente gradevole della scena. Ad esempio, una texture matcap potrebbe essere utilizzata per simulare l'aspetto di un muro di cemento o una corteccia d'albero, aggiungendo profondità e realismo al modello 3D.
- Seleziona la texture da applicare
-
Numero di ritorni: Rappresenta il numero totale di impulsi laser che sono stati emessi e ritornati al sensore LiDAR per acquisire quel particolare punto. Simile al numero di ritorni, il numero di ritorni può variare da 1 a 5 o più, a seconda del sistema LiDAR utilizzato. Il numero totale di ritorni può fornire informazioni sulla complessità e la struttura dell'oggetto o della scena scansionata. Ad esempio, un punto con un alto numero di ritorni può indicare un oggetto con più strati o geometria complessa, come una chioma di un albero o la facciata di un edificio.
-
ID sorgente del punto: Identifica il sensore laser specifico che ha generato il punto. Ogni sensore laser in un sistema LiDAR ha un ID o numero univoco, e queste informazioni vengono registrate nei dati della nuvola di punti per consentire l'analisi e il controllo qualità. L'ID sorgente del punto è particolarmente utile in situazioni in cui vengono utilizzati più sensori LiDAR per acquisire una singola scena o area. Identificando quale sensore ha generato ciascun punto, è possibile eseguire controlli di qualità sui dati e garantire che i dati siano correttamente allineati e registrati tra diversi sensori. Questo è particolarmente importante in applicazioni come la silvicoltura, dove più sensori LiDAR possono essere utilizzati per acquisire dati da diverse angolazioni e prospettive. Sulla nostra piattaforma, l'ID sorgente del punto viene utilizzato per memorizzare l'ID di scansione di origine, questo consente agli utenti di tracciare facilmente da quale scansione proviene ciascun punto nella nuvola di punti. Ad esempio, se sono state effettuate più scansioni della stessa area utilizzando un laser scanner 3D, a ciascuna scansione potrebbe essere assegnato un ID di scansione univoco e l'attributo ID sorgente del punto per ciascun punto nella nuvola di punti potrebbe essere impostato all'ID di scansione corrispondente.
-
RGBA: Viene utilizzato per rappresentare il colore di ciascun punto nella nuvola di punti. I canali rosso, verde e blu sono utilizzati per rappresentare il colore del punto, mentre il canale alfa viene utilizzato per rappresentare la trasparenza o l'opacità del punto. L'utilizzo dei colori nelle nuvole di punti LiDAR può essere utile per scopi di visualizzazione e interpretazione, poiché può fornire ulteriori informazioni sulle proprietà degli oggetti e delle superfici rappresentate dai punti. Ad esempio, nella mappatura della vegetazione, il colore dei punti può essere utilizzato per distinguere tra diversi tipi di vegetazione o per identificare aree di alta o bassa densità di vegetazione.
- Gamma: Fondamentalmente l'esposizione della nuvola di punti, gamma bassa equivale a maggiore esposizione, gamma alta, minore esposizione, dà un aspetto di tramonto
- Luminosità: La luminosità della nuvola di punti, una luminosità più bassa lo renderà più scuro, una luminosità più alta lo renderà più chiaro.
- Contrasto: Cambia il contrasto della nuvola di punti, un contrasto più basso renderà la nuvola di punti grigio, un contrasto più alto sovraesporrà i colori standard (rosso, giallo, verde, blu...)
-
Numero di ritorni: Rappresenta il numero di volte in cui un impulso laser è stato emesso e ritornato al sensore LiDAR per acquisire quel particolare punto. Simile al numero di ritorni, il numero di ritorni è tipicamente un valore tra 1 e 5, con 1 che indica il primo ritorno e 5 che indica il quinto ritorno. Il primo ritorno rappresenta l'impulso laser riflesso dalla superficie superiore dell'oggetto, mentre i ritorni successivi possono rappresentare riflessioni da superfici inferiori o riflessioni multiple all'interno dell'oggetto.
-
Classifica dell'angolo di scansione: Rappresenta l'angolo tra il raggio laser e la linea di riferimento dello scanner quando l'impulso laser è stato emesso per acquisire quel particolare punto. La classifica dell'angolo di scansione fornisce informazioni sull'angolo di acquisizione del punto, con un valore di 0 che indica la linea di riferimento dello scanner e valori positivi o negativi che indicano la deviazione dalla linea di riferimento. Nell'estrazione di edifici, la classifica dell'angolo di scansione può essere utilizzata per identificare le facciate degli edifici e le strutture del tetto in base al loro orientamento rispetto alla linea di riferimento dello scanner. Nell'analisi delle superfici stradali, la classifica dell'angolo di scansione può essere utilizzata per rilevare difetti o irregolarità della superficie in base all'angolo dello scanner rispetto alla superficie stradale.
-
Dati utente: Consente agli utenti di aggiungere informazioni aggiuntive alla nuvola di punti oltre agli attributi standard come le coordinate XYZ, intensità e numero di ritorni. I dati utente possono essere utilizzati per memorizzare una vasta gamma di informazioni, come valori di colore RGB, etichette di classificazione o metadati associati al punto. Ad esempio, i dati utente potrebbero essere utilizzati per indicare se un punto fa parte di un edificio, un albero o una strada, o per memorizzare informazioni sulla qualità della misurazione del punto o sulla sua incertezza. L'uso dei dati utente dipende dalle esigenze specifiche e dalle applicazioni dell'utente. Può essere utilizzato per una varietà di compiti, come il riconoscimento di oggetti, la classificazione, la segmentazione e la mappatura. Aggiungendo dati utente personalizzati a una nuvola di punti, è possibile estrarre informazioni più significative ed eseguire analisi e compiti di processamento più avanzati.
Se la tua nuvola di punti non è visualizzata correttamente all'inizio, prova gli attributi RGBA o intensità poiché sono i più utilizzati.
Scopri le proprietà delle nuvole di punti in questo articolo.
Se riscontri problemi, il nostro team di supporto è qui per aiutarti. Buona esplorazione!