הוסף תמונות 360° לפרויקט
הפלטפורמה תואמת תמונות 360°. אם יש לך פרויקט ReCap ויש לך תמונות 360°, כל שעליך לעשות הוא לדחוס את פרויקט ה-ReCap ולשלוח אותו; תמונות 360° יישמרו.
במקרים מסוימים, אם יש לך קובץ e57, בהתאם לכלי ששימש לייצוא קובץ ה-e57, תמונות 360° עשויות להיות כלולות בתוכו. במקרה כזה, הפלטפורמה שומרת את תמונות ה-360° (למשל, Cyclone REGISTER 360 שומר את התמונות אם קובץ ה-e57 מובנה, ו-NavVis ו-Geoslam גם שומרים את התמונות בתוך קובץ ה-e57).
אחרת, תוכל להעלות את התמונות בנפרד, לאחר שענן הנקודות שלך הועלה והופעל, פתח מחדש את דף ההעלאה וגרור קובץ .zip המכיל את התמונות.
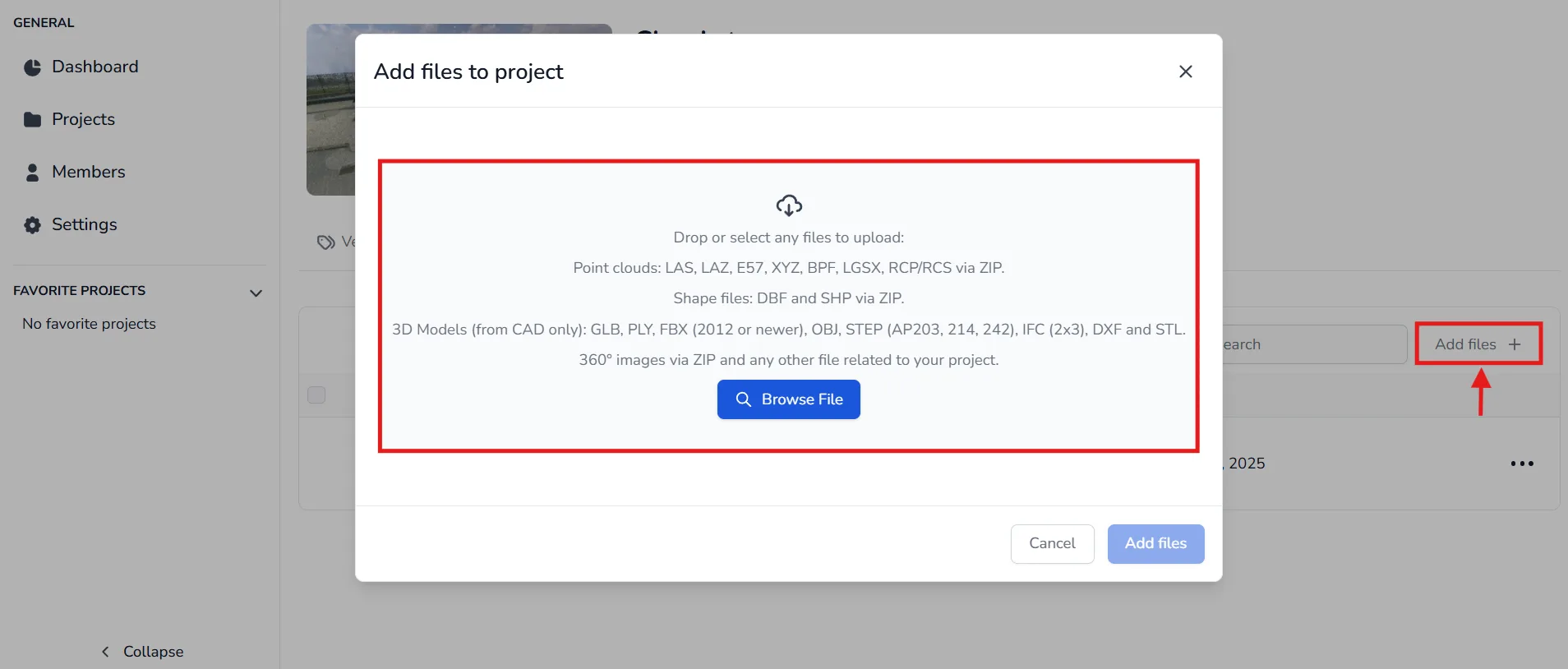
למד על סוגי קבצי ה-.zip השונים בהתאם לסורק שבו השתמשת למטה. כדי להעלות את התמונות שלך, גרור את קובץ .zip , הפלטפורמה תזהה אוטומטית את סוג התמונות שהעלית.
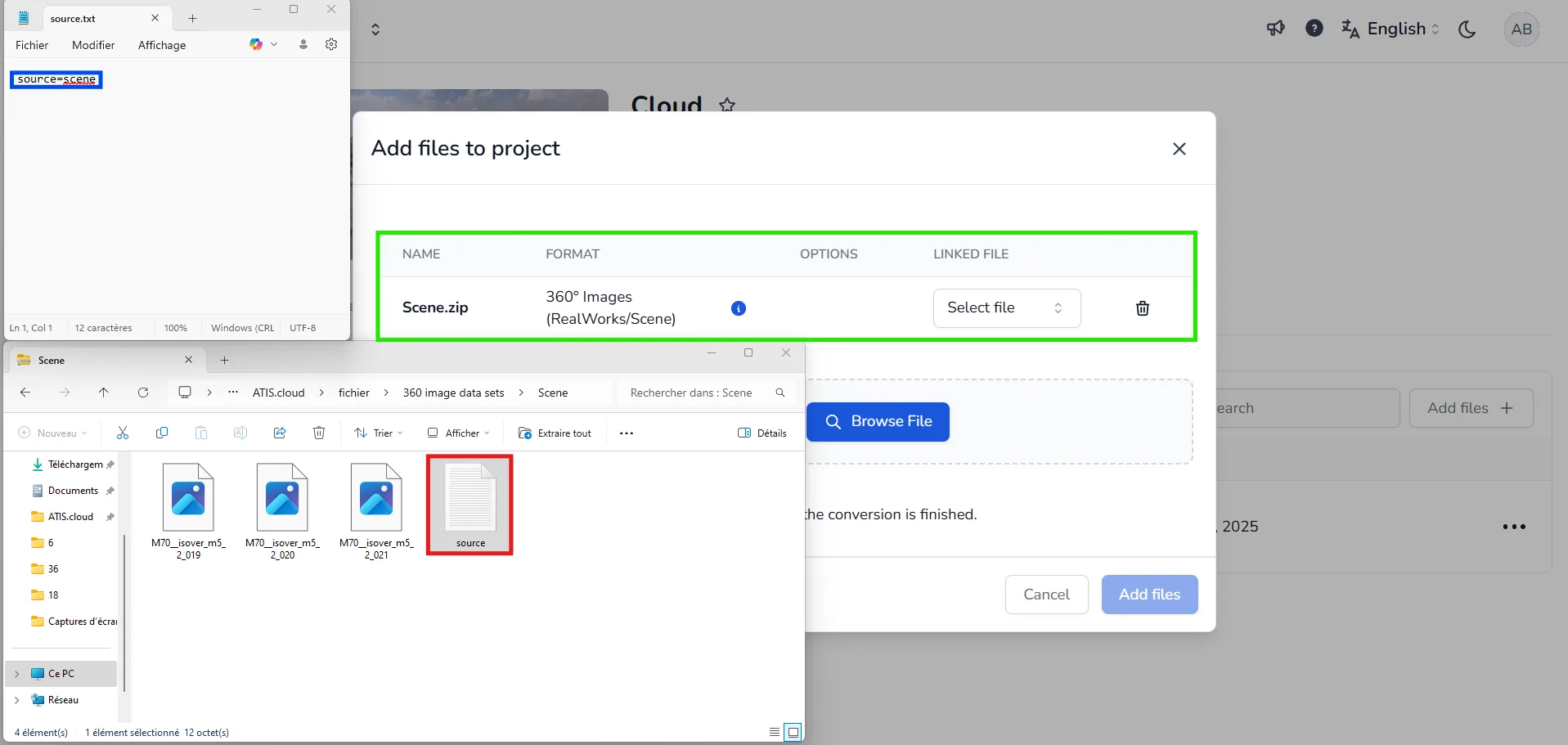
עבור סורקים קבועים, אין צורך בקובץ CSV שיכיל מידע מיקום, מאחר שהנתונים מגיעים מסריקה קרקעית ולכן הם מובנים; כל מה שעלינו לעשות הוא לקשר את התמונות עם התחנה שלהן. כל מה שנדרש הוא קובץ TXT שמודיע לפלטפורמה מאיזו תוכנה מגיעות התמונות. התמונות וקובץ ה-TXT צריכים להיות דחוסים לקובץ אחד שיועלה לפלטפורמה.
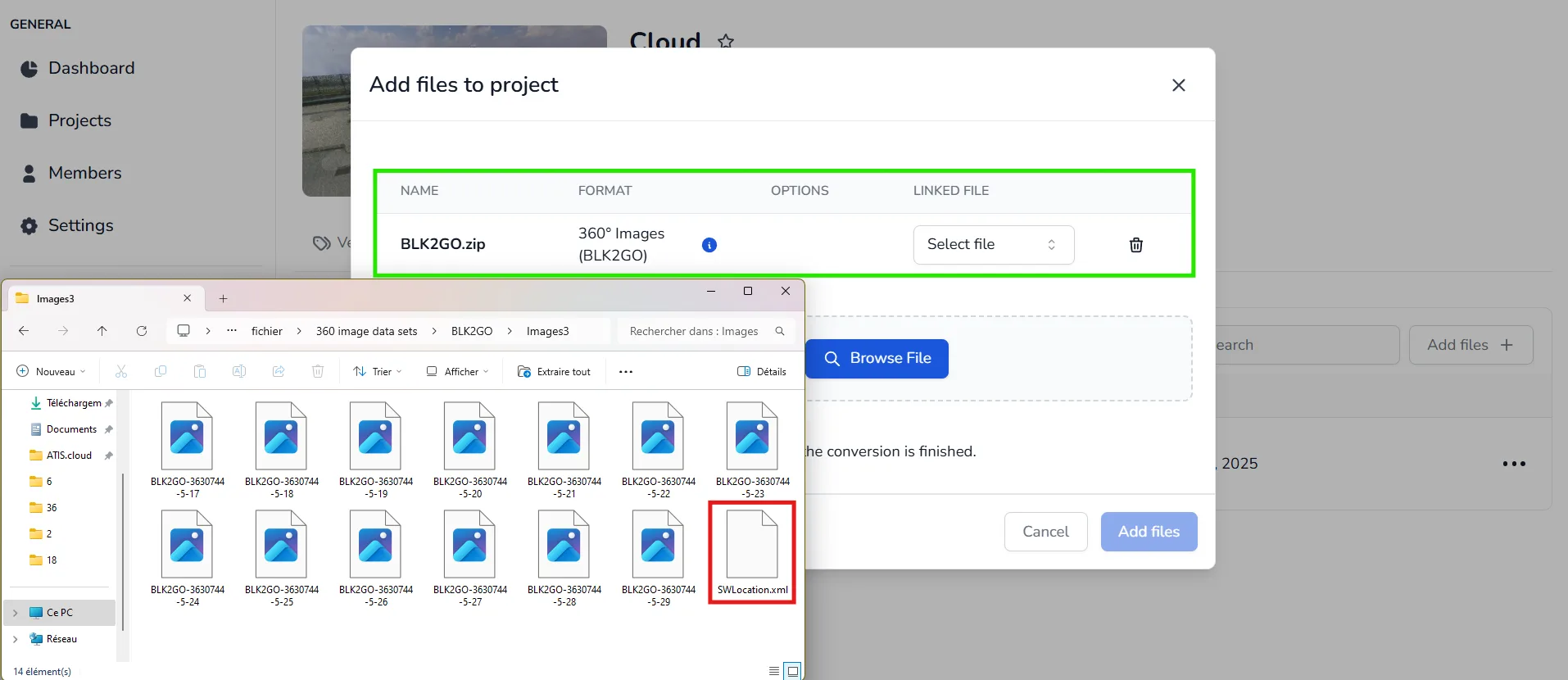
- Leica BLK2GO
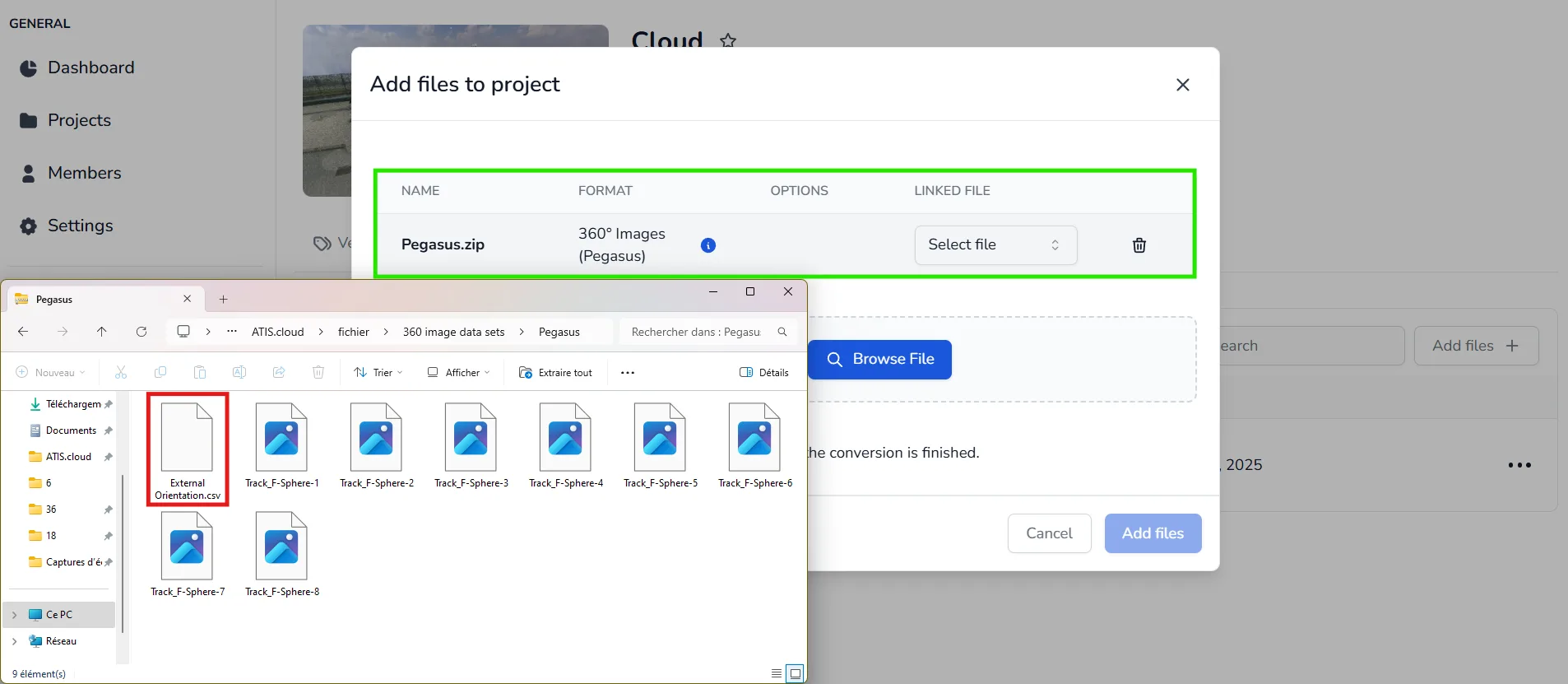
- Leica Pegasus
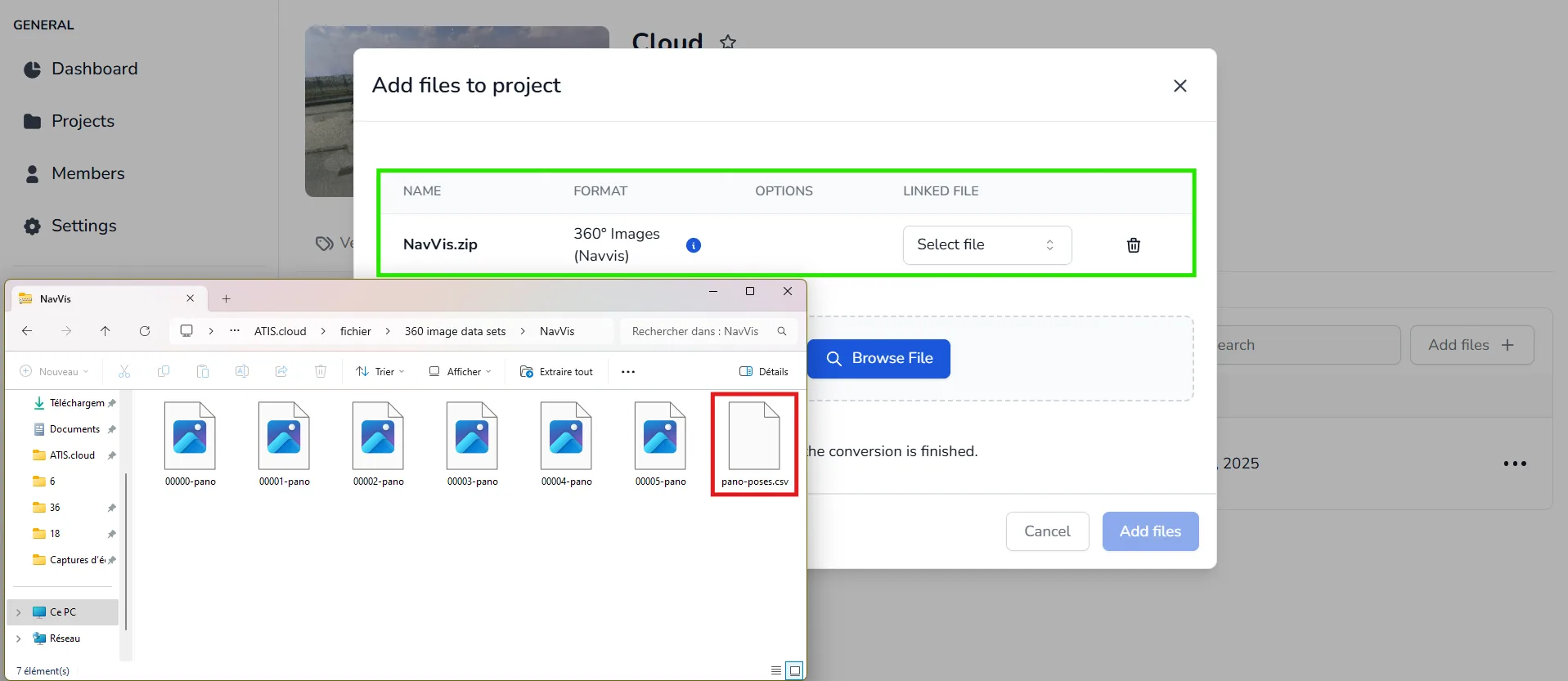
- NavVis
- FARO
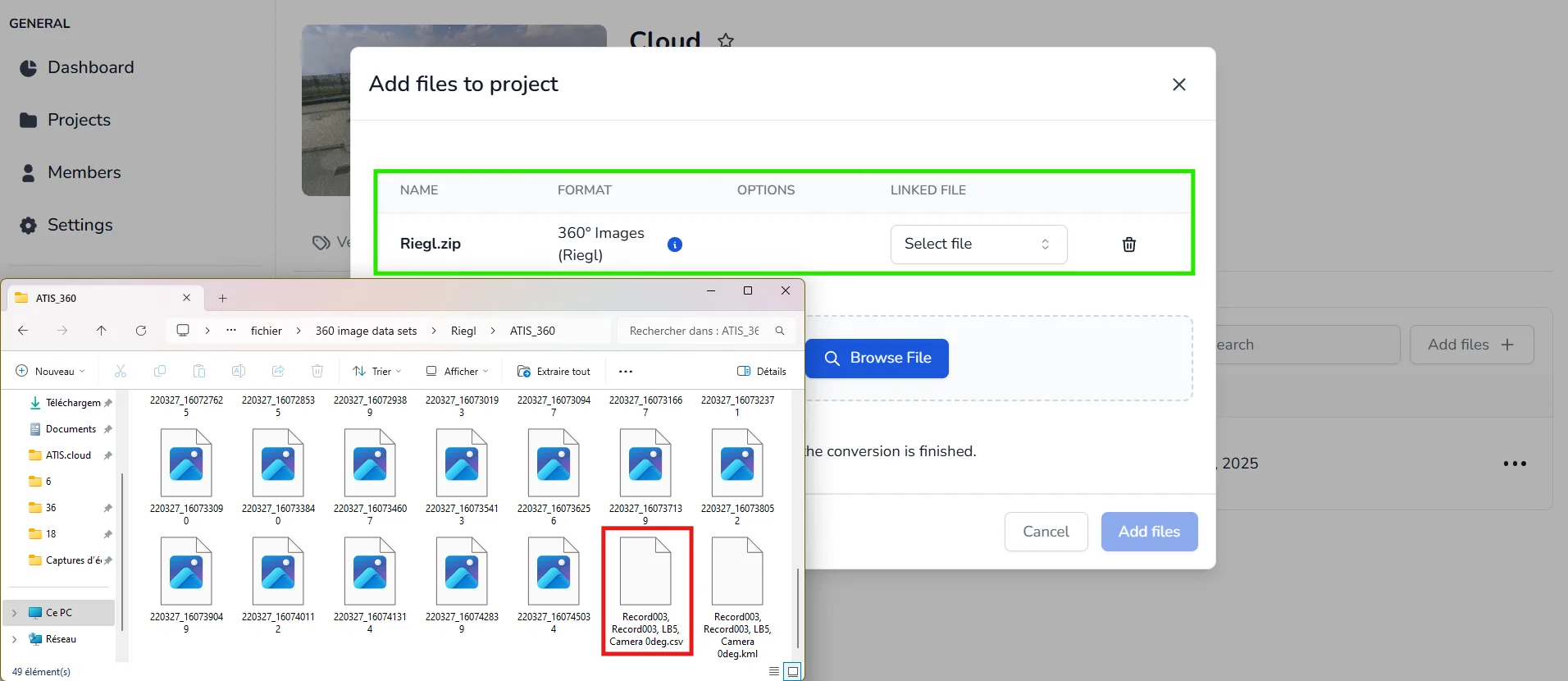
- Riegl
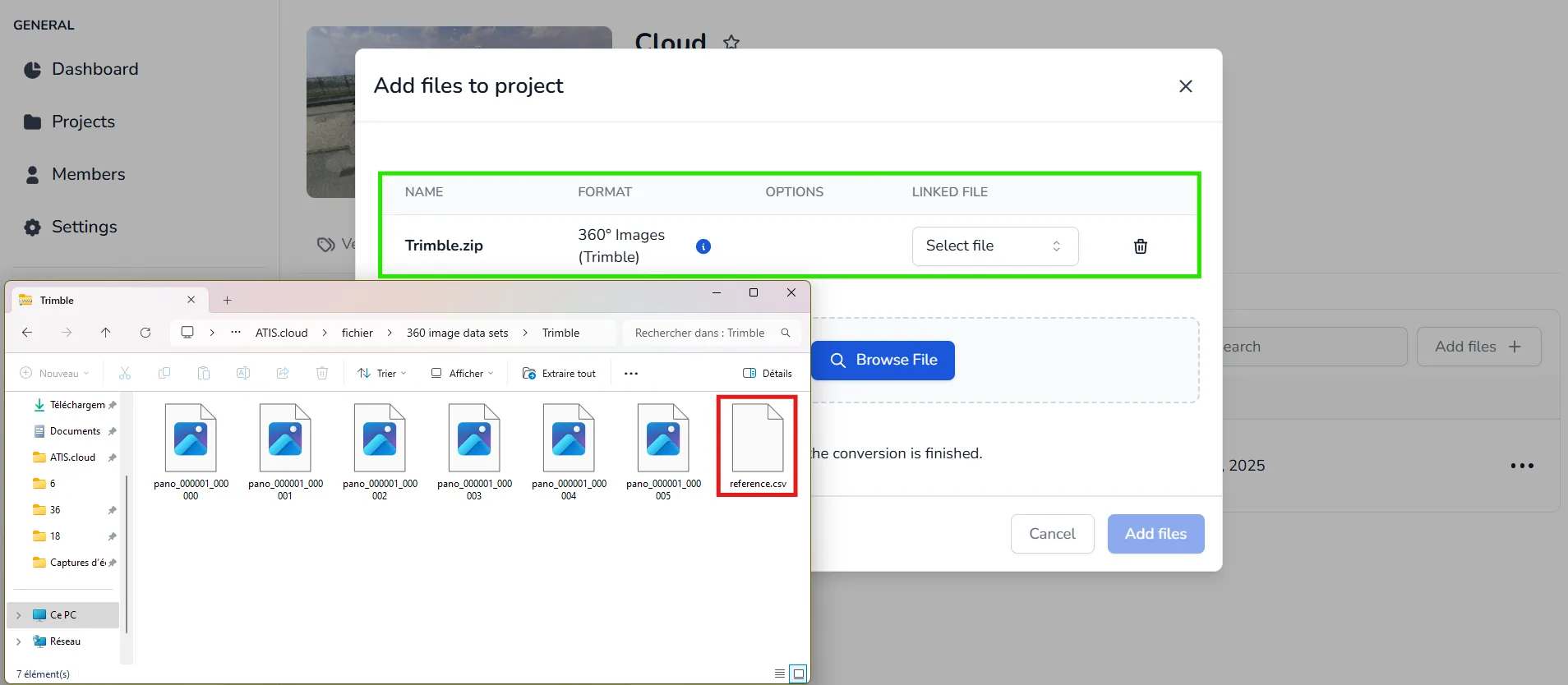
- Trimble MX9
- Viametris
- Realworks
- Mosaic
- XGRIDS
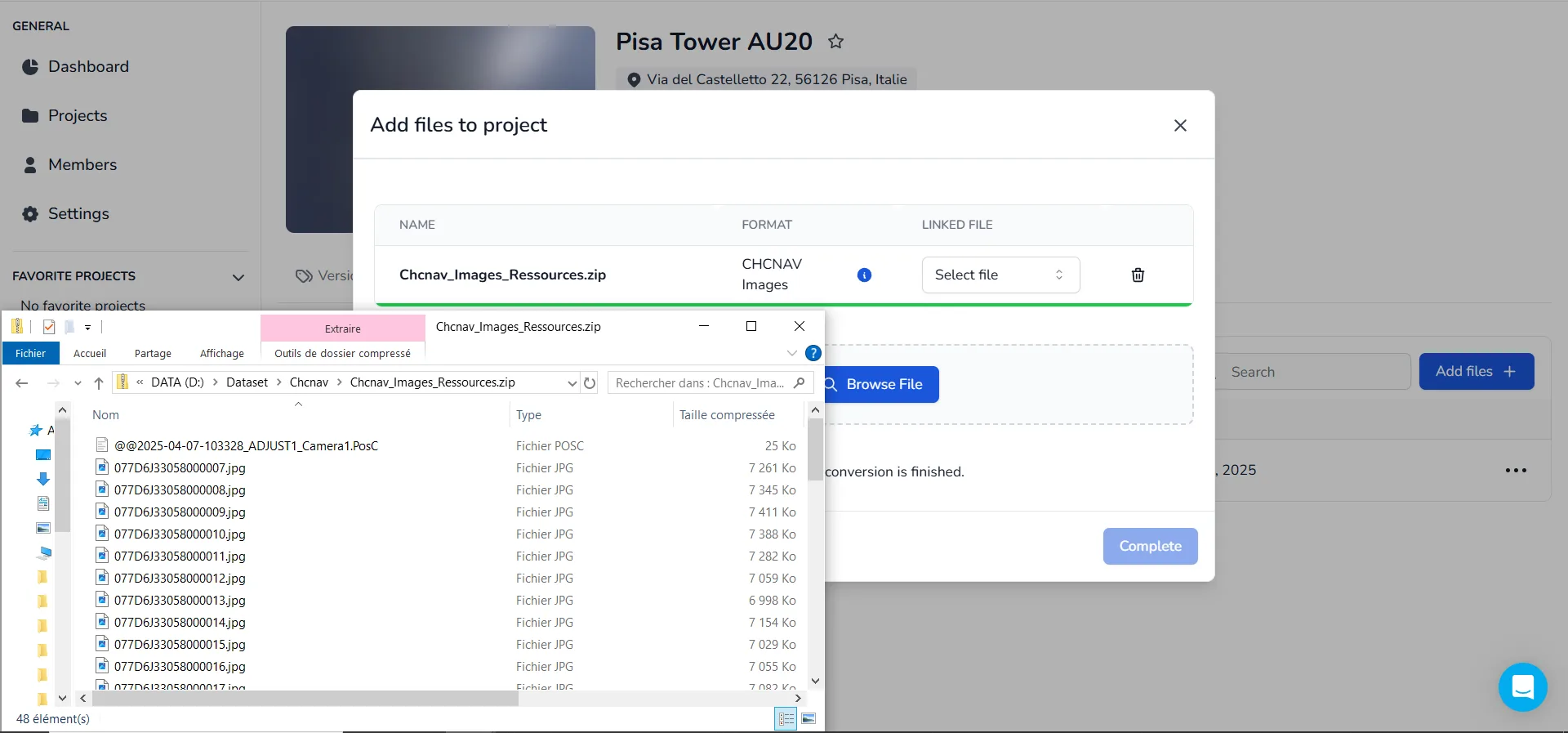
- CHCNAV
- 📂השתמש בקובץ ה-XML יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
- לחלופין, ניתן לייבא קובץ .LGSx שכולל את תמונות ה-360° שלך, שכן סוג קובץ זה נתמך.
- 📂השתמש בקובץ "External Orientation.csv" יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
- לחלופין, ניתן לייבא קובץ .LGSx שכולל את תמונות ה-360° שלך, שכן סוג קובץ זה נתמך.
- 📂השתמש בקובץ ה-CSV יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
- לחלופין, ניתן לייבא קובץ E57 מNavVis שכולל את תמונות ה-360°. ניתן לעיין בהמאמר המוקדש
- 📂לאחר שארכיון ה-ZIP מוכן, העלה אותו לפרויקט שלך. המערכת תזהה אוטומטית האם הוא מקורו בFARO Scene. אנא עיין בתמונת הדוגמה כדי לאמת את נוכחות קובץ ה-
.txtהנדרש בתוך ה-ZIP, שהוא חיוני לזיהוי ולעיבוד נכון..📥 - לחלופין, ניתן לייבא קובץ E57 מFaro Scene שכולל את תמונות ה-360°. ניתן לעיין בהמאמר המוקדש
📂השתמש בקובץ ה-CSV יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
📂השתמש בקובץ ה-CSV יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
-
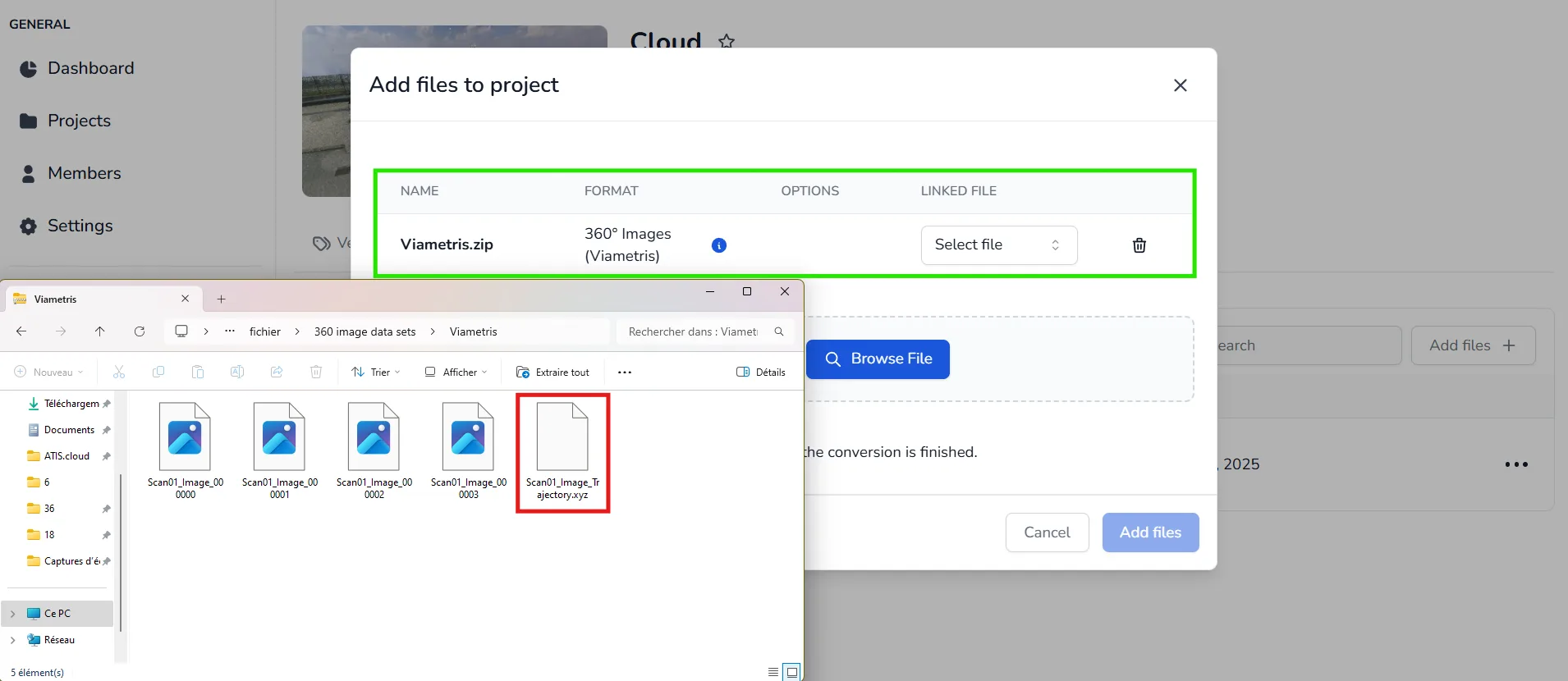
📂השתמש בקובץ ה-XYZ יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
⚠️ תקן שמות התמונות : כל תמונות ה-360° חייבות לעקוב אחרי פורמט השמות הנדרש, לדוגמה: image_000000.jpg, image_000001.jpg, image_000002.jpg, וכן הלאה, באמצעות רצף מיספור אינקרמנטלי רציף.
-
לחלופין, ניתן לייבא ישירות קובץ E57 שכולל את תמונות ה-360° שלך.
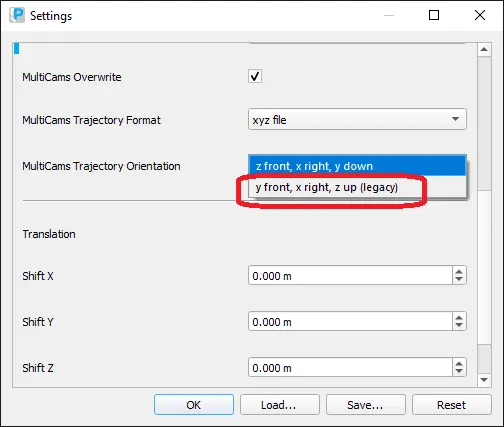
שים לב שבעדכון האחרון של תוכנת PPiMMS ניתן לבחור את MultiCams Trajectory Orientation. הפלטפורמה תואמת כעת את האפשרות "y front, x right, z up (legacy)". ודא שאפשרות זו נבחרה לפני ייצוא התמונות מ-PPiMMS .
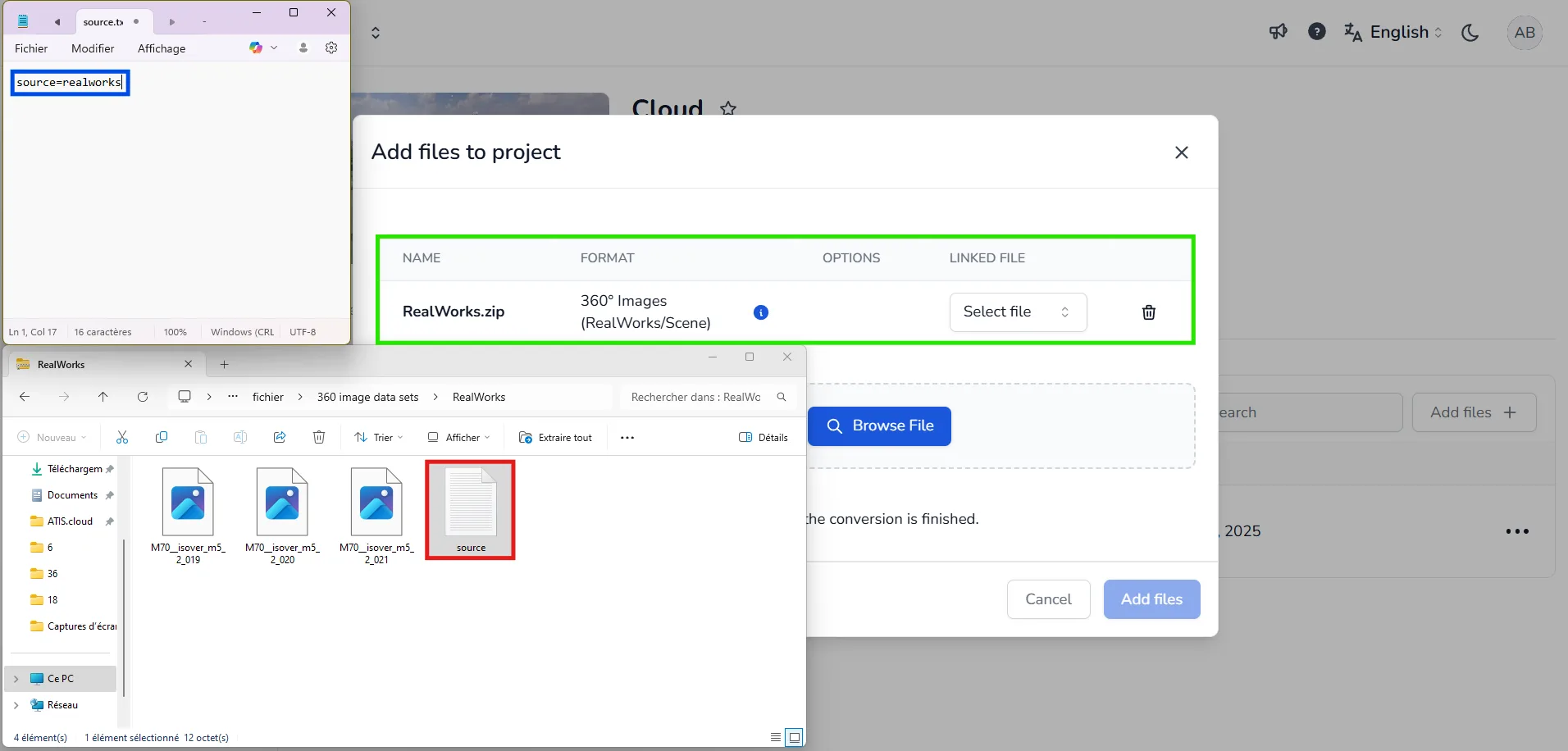
📂לאחר שארכיון ה-ZIP מוכן, העלה אותו לפרויקט שלך. המערכת תזהה אוטומטית האם הוא מקורו בTrimble Realworks. אנא עיין בתמונת הדוגמה כדי לאמת את נוכחות קובץ ה-.txt הנדרש בתוך ה-ZIP, שהוא חיוני לזיהוי ולעיבוד נכון.📥
📂השתמש בקובץ ה-CSV יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
⬇️ אנא הורד את קובץ התבנית CSV כדי להכין את ייבוא תמונות ה-Mosaic שלך.
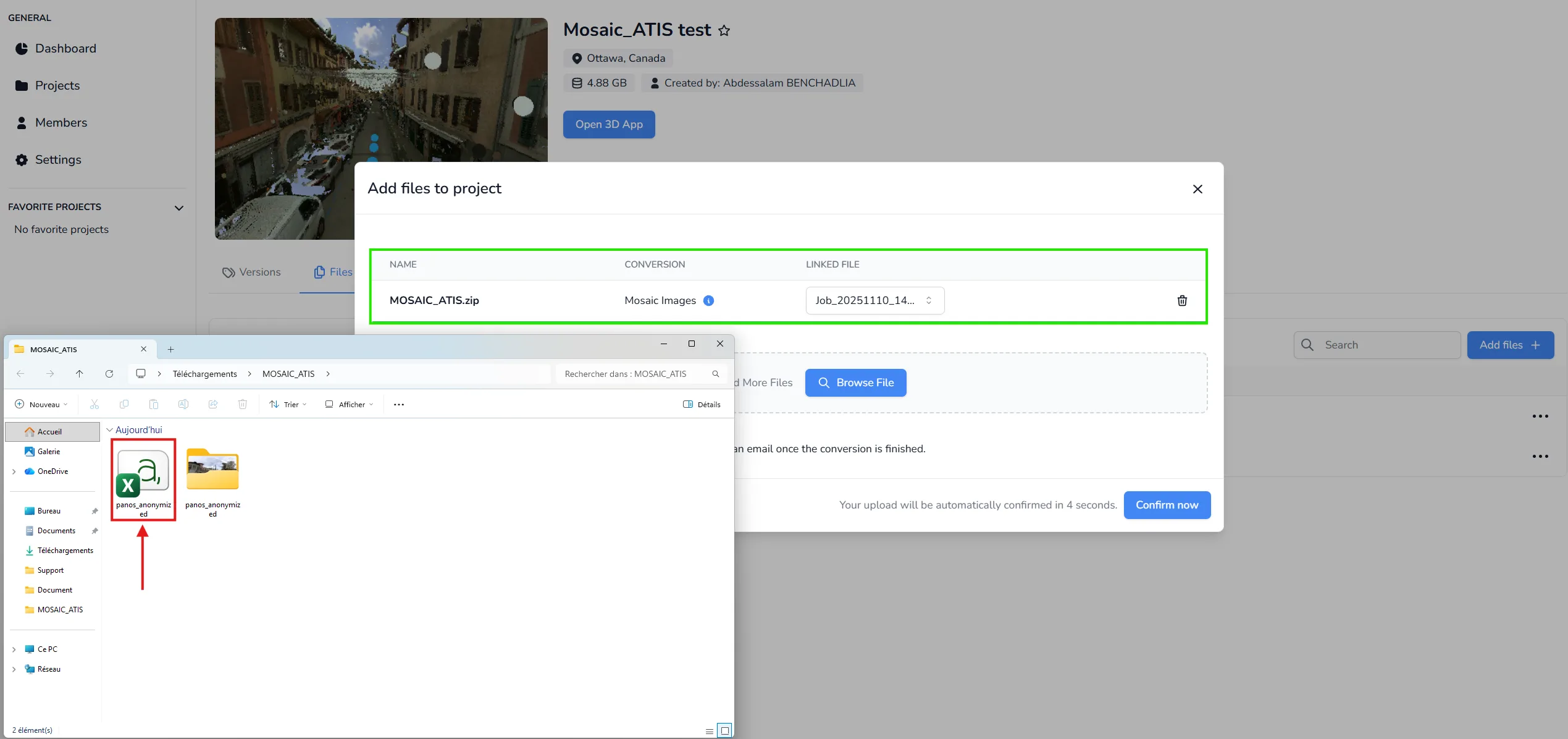
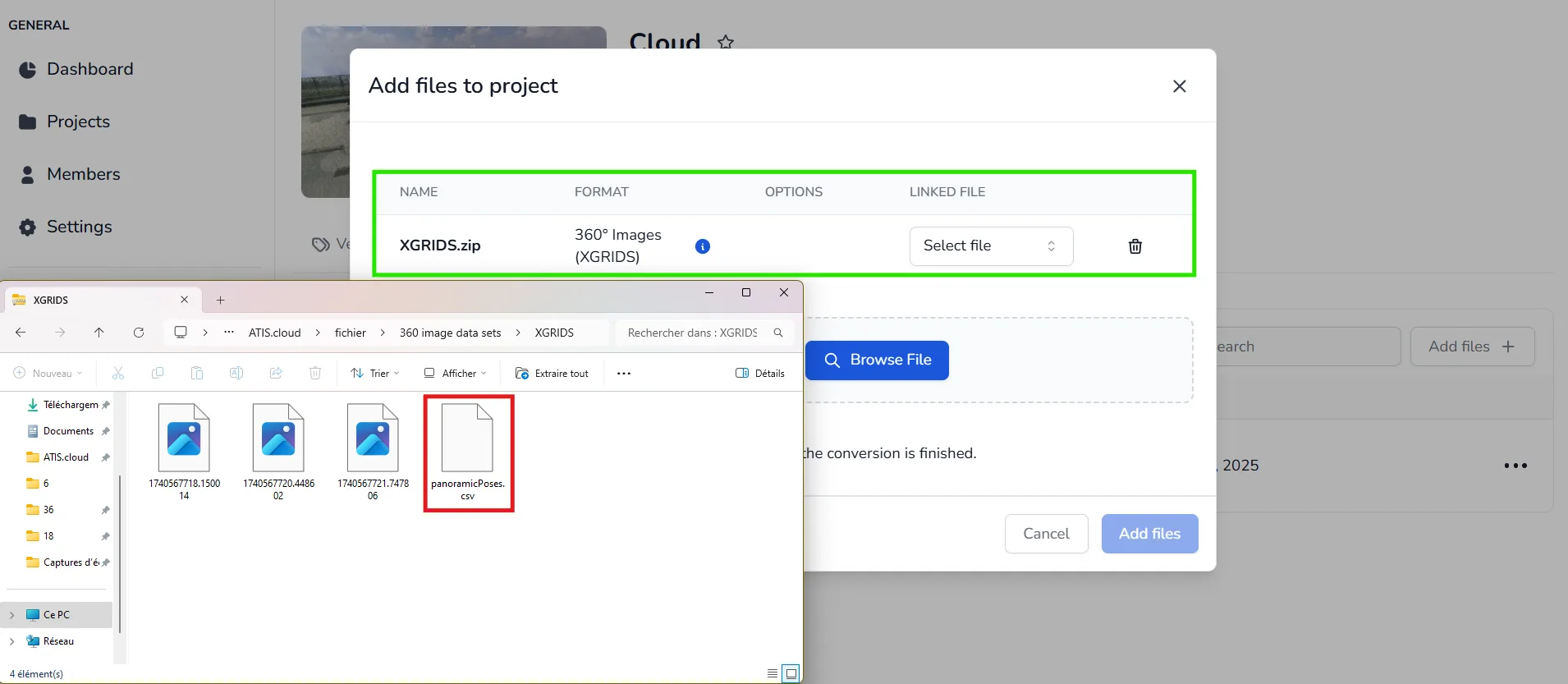
📂השתמש בקובץ "panoramicPoses.csv" יחד עם התמונות שלך ודחס את הכל לקובץ ZIP.📥
📂השתמש בקובץ ה-PosC יחד עם התמונות שלך ודחס את הכל לקובץ ZIP. קובץ ה-PosC עוקב אחרי פורמט של "@@yy-mm-dd-id_ADJUST1_Camera1.PosC". המערכת תזהה אוטומטית האם הוא מקורו בCHCNAV.📥 ניתן לעיין בהמאמר המוקדש.
במקרה של בעיה או קושי, אל תהססו לפנות לצוות הפלטפורמה.