מאפייני ענן נקודות
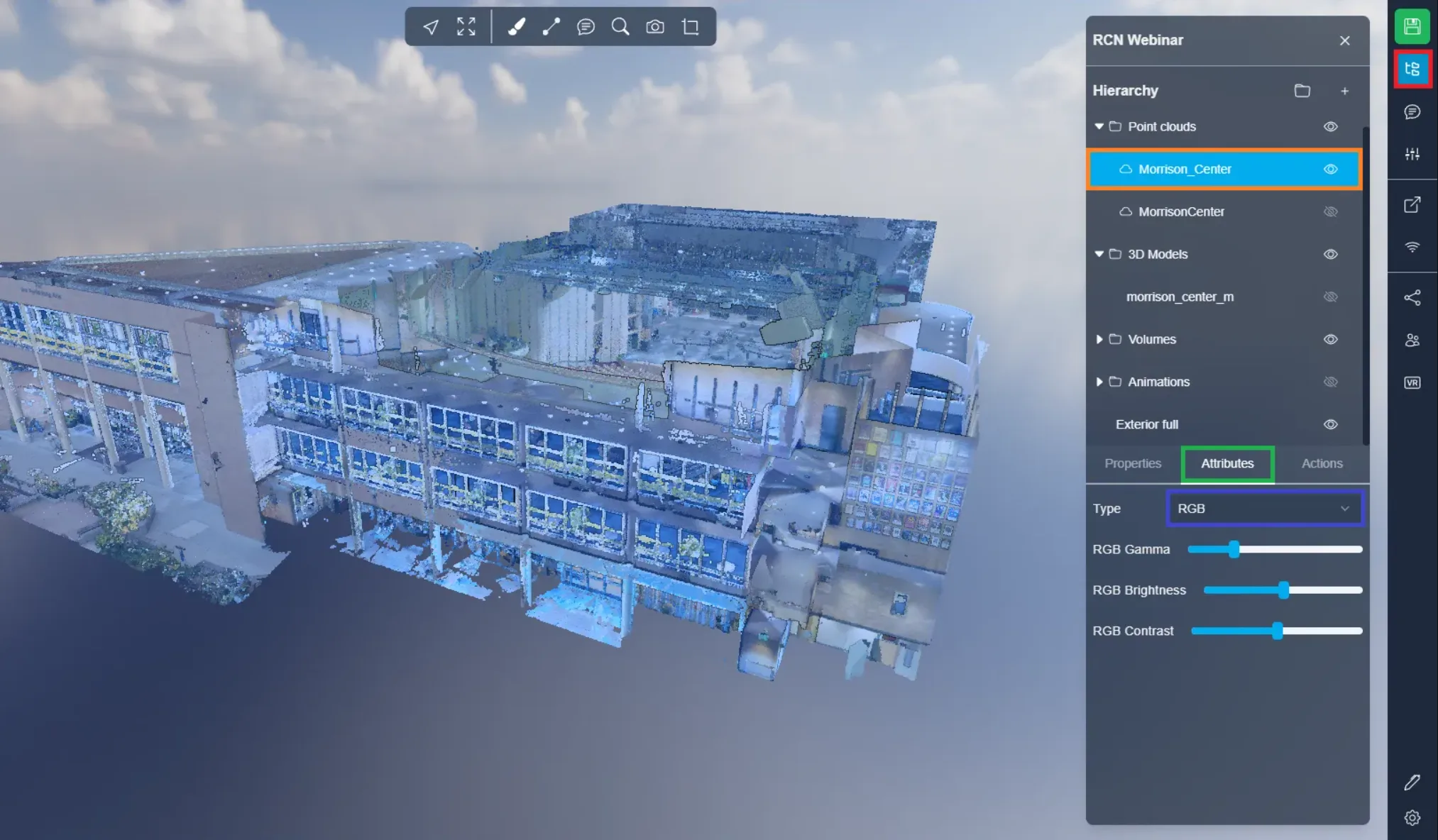
כדי לגשת למאפיינים של ענן נקודות, פתח את תפריט הפרויקט ובחר את ענן הנקודות שלך. לחץ על לשונית המאפיינים; מתחתיה תמצא תפריט נפתח שמפרט את כל המאפיינים האפשריים - בחר מתוכו את המאפיין הרצוי. בהמשך תמצא רשימה של כל המאפיינים האפשריים ומה כל אחד מהם עושה.
-
ניתוח : פועל רק עם ענני נקודות של ניתוח; למידע נוסף על ניתוח, עיין במאמר זה.
- שם : שינוי שם של ענן הנקודות
- הצג את המיקום
- הצג את הסיבוב
- הצג את קנה המידה
- מחק את הניתוח (המחיקה מתבצעת רק מאפליקציית ה-3D; אם זהו ניתוח בצד השרת, ניתן לטעון אותו מחדש מאוחר יותר)
-
סיווג : פועל רק עם ענני נקודות תואמים. מטרת הסיווג היא לקבץ נקודות דומות בקטגוריות בעלות משמעות, כגון קרקע, צמחייה, מבנים ואובייקטים אחרים.
- הצגה/הסתרה של הכל: מציג או מסתיר כל קטגוריה
- שורה אחת לכל קטגוריה; לחץ על השורה כדי להציג או להסתיר אותה, ולחץ על הצבע כדי לשנות אותו
-
צבע : צובע את כל ענן הנקודות בצבע אחד
- בחר צבע באמצעות הפלטה
- השתמש בקוד הקסדצימלי לבחירת הצבע
- בחר אחד מהצבעים מרשימת ברירת המחדל
-
מורכב : בחר באפשרות זו אם ברצונך לשלב כמה אפשרויות בו-זמנית; גרור את המחוונים כדי להגדיל או להקטין את השימוש בכל אחת מהן.
- RGBA : ענן נקודות צבעוני
- גמא : למעשה החשיפה של ענן הנקודות; גמא נמוך פירושו חשיפה גבוהה יותר, וגמא גבוה - חשיפה נמוכה יותר, שמעניקה מראה של שקיעה
- בהירות : רמת הבהירות של ענן הנקודות; ערך נמוך יכהה אותו וערך גבוה יבהיר אותו.
- ניגודיות : משנה את הניגודיות של ענן הנקודות; ניגודיות נמוכה תהפוך את ענן הנקודות לאפור, וניגודיות גבוהה תגרום לחשיפת יתר של הצבעים הסטנדרטיים (אדום, צהוב, ירוק, כחול...)
- עוצמה : עוצמתו או חוזקו של האות
- טווח : מעוצמה נמוכה לעוצמה גבוהה
- גמא : למעשה החשיפה של ענן הנקודות; גמא נמוך פירושו חשיפה גבוהה יותר, וגמא גבוה - חשיפה נמוכה יותר, שמעניקה מראה של שקיעה
- בהירות : רמת הבהירות של ענן הנקודות; ערך נמוך יכהה אותו וערך גבוה יבהיר אותו.
- ניגודיות : משנה את הניגודיות של ענן הנקודות; ניגודיות נמוכה תהפוך את ענן הנקודות לאפור, וניגודיות גבוהה תגרום לחשיפת יתר של הצבעים הסטנדרטיים (אדום, צהוב, ירוק, כחול...)
- גובה : גובה או מיקום אנכי של כל נקודה
- טווח גובה : קובע באיזה גובה הגרדיאנט מתחיל והיכן הוא מסתיים
- מצב גרדיאנט
- Clamp : גרדיאנט סטנדרטי; מחוץ לטווח נשמר צבע הקצה האחרון
- Repeat : כאשר הגרדיאנט מסתיים, הוא מתחיל מחדש מהצבע המקורי
- Mirror Repeat : כאשר הגרדיאנט מסתיים, נוסף גרדיאנט חדש בכיוון הפוך; דומה ל-Repeat, אלא שאין קטיעה בצבע
- תכנית גרדיאנט : משנה את צבעי הגרדיאנט; הבחירה מתוך רשימה מוגדרת מראש בלבד
- ניתוח : רק אם זמין בענן הנקודות, השוואה בין מודל לענן הנקודות
- סיווג : רק אם זמין בענן הנקודות, מפריד בין סוגים שונים של אובייקטים (קרקע, צמחייה, מבנים...)
- מספר החזרות : מספר הפולסים שנדרשו כדי לקלוט את הנקודה
- מזהה מקור נקודה : מקובץ לפי מזהה סריקה
- RGBA : ענן נקודות צבעוני
-
גובה : מציין את הגובה או המיקום האנכי של כל נקודה. נתוני גובה חשובים ביישומים רבים של ענני נקודות, כמו מיפוי טופוגרפי, מידול הצפות, תכנון עירוני ותכנון תשתיות. ניתוח נתוני הגובה מאפשר ליצור מודלים דיגיטליים מדויקים ומפורטים של פני השטח (DEMs) המשמשים למגוון רחב של צורכי ניתוח והדמיה גיאו-מרחביים.
- טווח גובה : קובע באיזה גובה הגרדיאנט מתחיל והיכן הוא מסתיים
- מצב גרדיאנט
- Clamp : גרדיאנט סטנדרטי; מחוץ לטווח נשמר צבע הקצה האחרון
- Repeat : כאשר הגרדיאנט מסתיים, הוא מתחיל מחדש מהצבע המקורי
- Mirror Repeat : כאשר הגרדיאנט מסתיים, נוסף גרדיאנט חדש בכיוון הפוך; דומה ל-Repeat, אלא שאין קטיעה בצבע
- תכנית גרדיאנט : משנה את צבעי הגרדיאנט; הבחירה מתוך רשימה מוגדרת מראש בלבד
-
זמן GPS : זמן GPS הוא מאפיין חשוב המשויך לכל נקודה בענן הנקודות. הוא מציין מתי נשלח פולס הלייזר ומתי התקבל הפולס החוזר, ובכך מאפשר חישוב מדויק של הטווח והמיקום של הנקודה. בנוסף, זמן GPS יכול לשמש גם לבקרת איכות ולניתוח: בחינת התפלגות ערכי זמן ה-GPS על פני ענן הנקודות מאפשרת לזהות אזורים עם חריגות או שגיאות בציר הזמן, שעשויות להעיד על בעיות בנתונים או במערכת ה-LiDAR.
-
אינדקסים : אינדקסים הם מאפיינים המשויכים לכל נקודה בענן נקודות LiDAR ומספקים מידע נוסף על התכונות המרחביות של הנקודה ועל יחסיה עם נקודות אחרות בענן. הם משמשים לעיתים קרובות למשימות ניתוח ועיבוד מתקדמות, כמו סגמנטציה, סיווג ושליפת תכונות. קיימים כמה סוגים של אינדקסים שניתן להשתמש בהם בעיבוד ענן נקודות LiDAR, ובהם:
- וקטור נורמלי: אינדקס זה מייצג את כיוון הנקודה ביחס לסביבתה המקומית. הוא יכול לשמש לזיהוי משטחים מישוריים או להערכת נורמלים של המשטח לצורך שחזורו.
- קמירות: אינדקס זה מציין את הקמירות המקומית של המשטח בנקודה. הוא יכול לשמש לזיהוי קצוות חדים או להערכת רדיוס הקמירות של משטחים מעוקלים.
- גובה מעל הקרקע: אינדקס זה מציין את גובה הנקודה מעל הקרקע או מעל משטח ייחוס. הוא יכול לשמש למידול פני השטח או לזיהוי אובייקטים הנמצאים מעל פני הקרקע או מתחתיהם.
- גובה יחסי: אינדקס זה מציין את גובה הנקודה ביחס לנקודות השכנות לה. הוא יכול לשמש לזיהוי אובייקטים הגבוהים או הנמוכים מסביבתם.
- צפיפות: אינדקס זה מציין את צפיפות הנקודות בסביבה המקומית של הנקודה. ניתן להשתמש בו לזיהוי אזורים בעלי צפיפות נקודות גבוהה או נמוכה, כמו צמחייה או חזיתות בניינים.
-
עוצמה : מציינת את עוצמת האות שקלט החיישן או המכשיר בעת לכידת הנקודה. במקרים מסוימים העוצמה קשורה למידת החזר האור של האובייקט באותה נקודה. לדוגמה, בענן נקודות LiDAR ערך העוצמה מציין את כמות אור הלייזר שהאובייקט החזיר אל החיישן. במקרה זה, ערך עוצמה גבוה יעיד על משטח המחזיר יותר אור, כמו קיר לבן, בעוד שערך עוצמה נמוך יעיד על משטח המחזיר פחות אור, כמו מכונית שחורה. במקרים אחרים העוצמה יכולה לייצג גודל פיזיקלי אחר. לדוגמה, בענן נקודות שמקורו בצילום, העוצמה עשויה לייצג את בהירות הפיקסל בתמונה המקורית ששימשה ליצירת ענן הנקודות.
- טווח : מעוצמה מינימלית עד מקסימלית
- גמא : למעשה החשיפה של ענן הנקודות; גמא נמוך פירושו חשיפה גבוהה יותר, וגמא גבוה - חשיפה נמוכה יותר, שמעניקה מראה של שקיעה
- בהירות : רמת הבהירות של ענן הנקודות; ערך נמוך יכהה אותו וערך גבוה יבהיר אותו.
- ניגודיות : משנה את הניגודיות של ענן הנקודות; ניגודיות נמוכה תהפוך את ענן הנקודות לאפור, וניגודיות גבוהה תגרום לחשיפת יתר של הצבעים הסטנדרטיים (אדום, צהוב, ירוק, כחול...)
-
גרדיאנט עוצמה : מדד לשינוי בעוצמה בין נקודות שכנות בענן הנקודות. הוא מייצג את הקצב שבו העוצמה משתנה ביחס למרחק או למיקום.
-
רמת פירוט : בעיבוד ענן נקודות LiDAR, רמת פירוט (LOD) יכולה להתייחס לצפיפות הנקודות בענן, לרזולוציית הנתונים או לרמת ההפשטה שבה הנתונים מיוצגים. לדוגמה, ענן נקודות ברמת פירוט גבוהה יתאפיין בצפיפות נקודות גבוהה, ברזולוציה גבוהה וברמת הפשטה עדינה. לעומת זאת, ענן נקודות ברמת פירוט נמוכה יתאפיין בצפיפות נקודות נמוכה יותר, ברזולוציה נמוכה וברמת הפשטה גסה.
-
Matcap : בעיבוד ענן נקודות LiDAR ניתן להשתמש ב-matcap כדי להוסיף למודלים תלת-ממדיים שנוצרו מענני נקודות טקסטורות ואפקטים של הצללה. החלת טקסטורת matcap על מודל תלת-ממדי מאפשרת ליצור ייצוג מציאותי ומושך יותר ויזואלית של הסצנה.
-
מספר החזרות : מציין את המספר הכולל של פולסי הלייזר שנשלחו והוחזרו לחיישן ה-LiDAR כדי ללכוד את הנקודה המסוימת הזו. בדומה למספר החזרה, מספר ההחזרות יכול לנוע בין 1 ל-5 או יותר, בהתאם למערכת ה-LiDAR שבשימוש. המספר הכולל של ההחזרות יכול לספק מידע על המורכבות והמבנה של האובייקט או הסצנה הנסרקים.
-
מזהה מקור נקודה : מזהה את חיישן הלייזר שיצר את הנקודה. לכל חיישן לייזר במערכת LiDAR יש מזהה או מספר ייחודי, ומידע זה נשמר בנתוני ענן הנקודות כדי לאפשר ניתוח ובקרת איכות של הנתונים.
-
RGBA : משמש לייצוג הצבע של כל נקודה בענן הנקודות. ערוצי האדום, הירוק והכחול מייצגים את צבע הנקודה, ואילו ערוץ האלפא מייצג את מידת השקיפות או האטימות שלה.
-
מספר החזרה : מציין את מספר הפעמים שפולס לייזר נשלח והוחזר לחיישן ה-LiDAR כדי לקלוט את הנקודה המסוימת הזו.
-
דירוג זווית סריקה : מציין את הזווית בין קרן הלייזר לבין קו הייחוס של הסורק ברגע שבו נשלח פולס הלייזר כדי ללכוד את הנקודה המסוימת הזו.
-
נתוני משתמש : מאפשרים למשתמשים להוסיף לענן הנקודות מידע נוסף מעבר למאפיינים הסטנדרטיים כמו קואורדינטות XYZ, עוצמה ומספר החזרה.
אם ענן הנקודות שלך אינו מוצג כראוי בהתחלה, נסה את מאפייני RGBA או עוצמה, שכן אלה הנפוצים ביותר בשימוש.
למד על תכונות ענן הנקודות במאמר זה.
אם נתקלת בבעיה כלשהי, צוות התמיכה שלנו ישמח לעזור. סיור מהנה!