Agregar imágenes de 360° a un proyecto
La plataforma es compatible con imágenes de 360°. Si tiene un proyecto ReCap y tiene imágenes de 360°, solo tiene que comprimir el proyecto ReCap y cargarlo; las imágenes de 360° se conservarán.
En algunos casos, si tiene un archivo e57, dependiendo de la herramienta usada para exportar el archivo e57, las imágenes de 360° pueden estar incluidas en su interior. En ese caso, la plataforma conserva las imágenes de 360° (por ejemplo, Cyclone REGISTER 360 conserva las imágenes si el archivo e57 está estructurado, y NavVis y Geoslam también mantienen las imágenes en el archivo e57).
De lo contrario, podrá cargar las imágenes por separado: después de que su nube de puntos esté cargada y activa, vuelva a abrir la página de carga y suelte un archivo .zip que contenga sus imágenes.
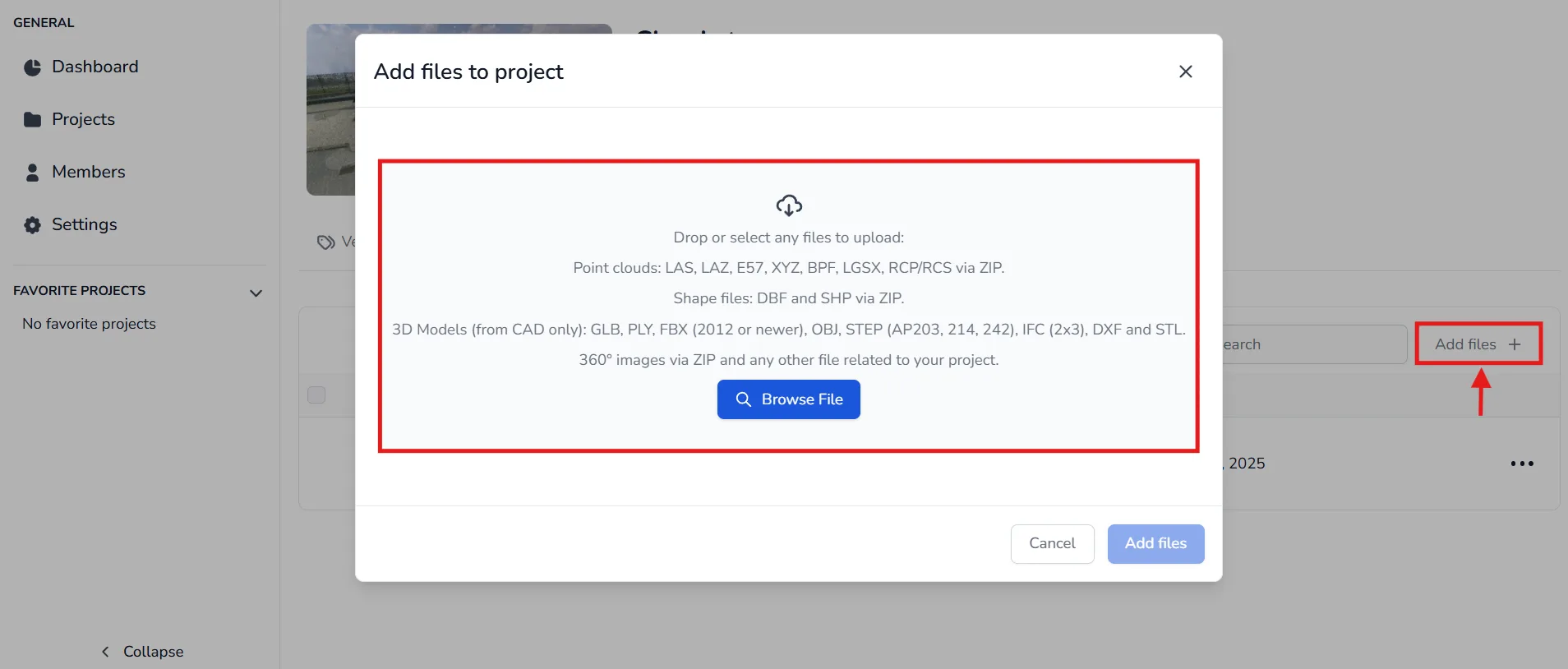
Consulte los distintos archivos .zip según el escáner utilizado más abajo. Para cargar sus imágenes, suelte su archivo .zip , la plataforma reconocerá automáticamente el tipo de imágenes que cargó.
Para los escáneres fijos, no es necesario un archivo CSV que contenga información de posicionamiento, porque los datos provienen de un escaneo terrestre y están, por lo tanto, estructurados; solo hay que vincular las imágenes con su estación. Todo lo que necesitamos es un archivo TXT que indique a la plataforma de qué software provienen las imágenes. Las imágenes y el archivo TXT deben comprimirse en un archivo, que se cargará en la plataforma.
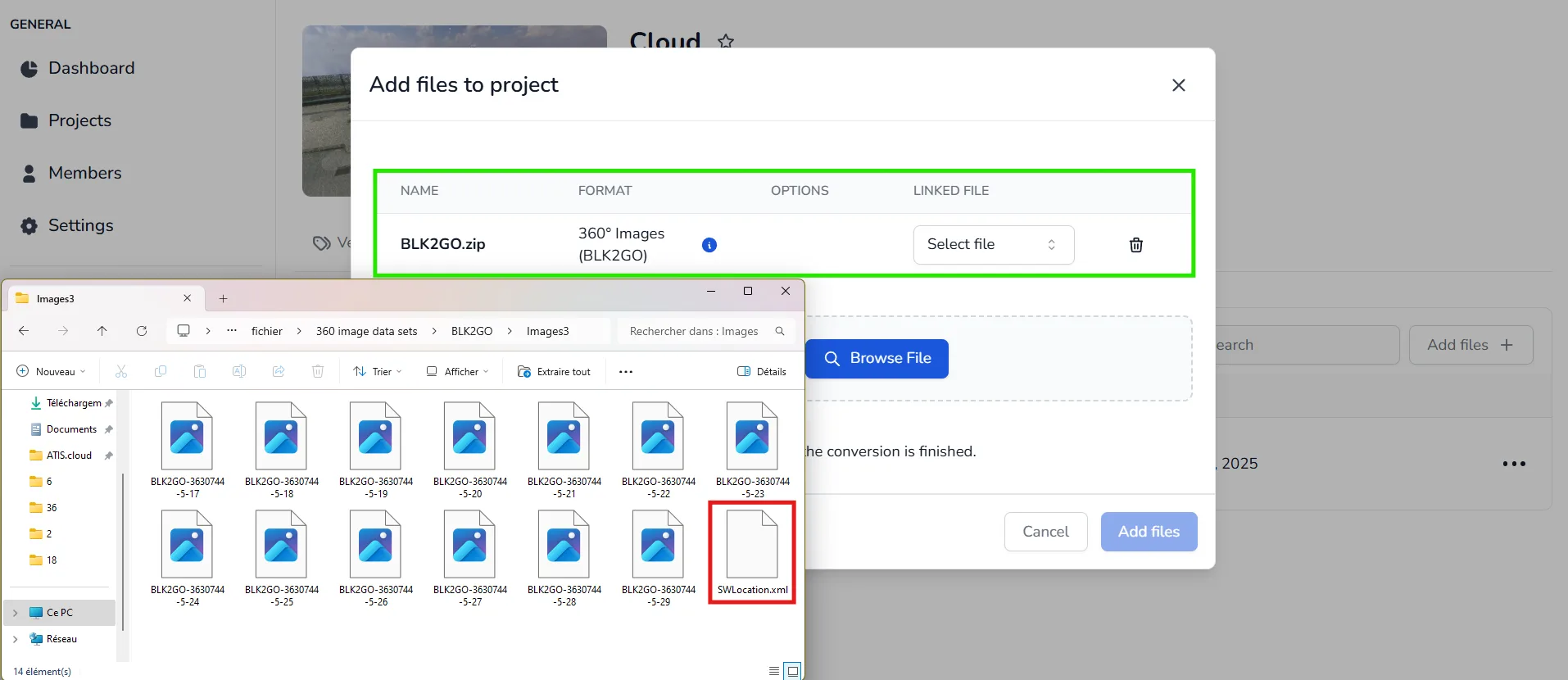
- Leica BLK2GO
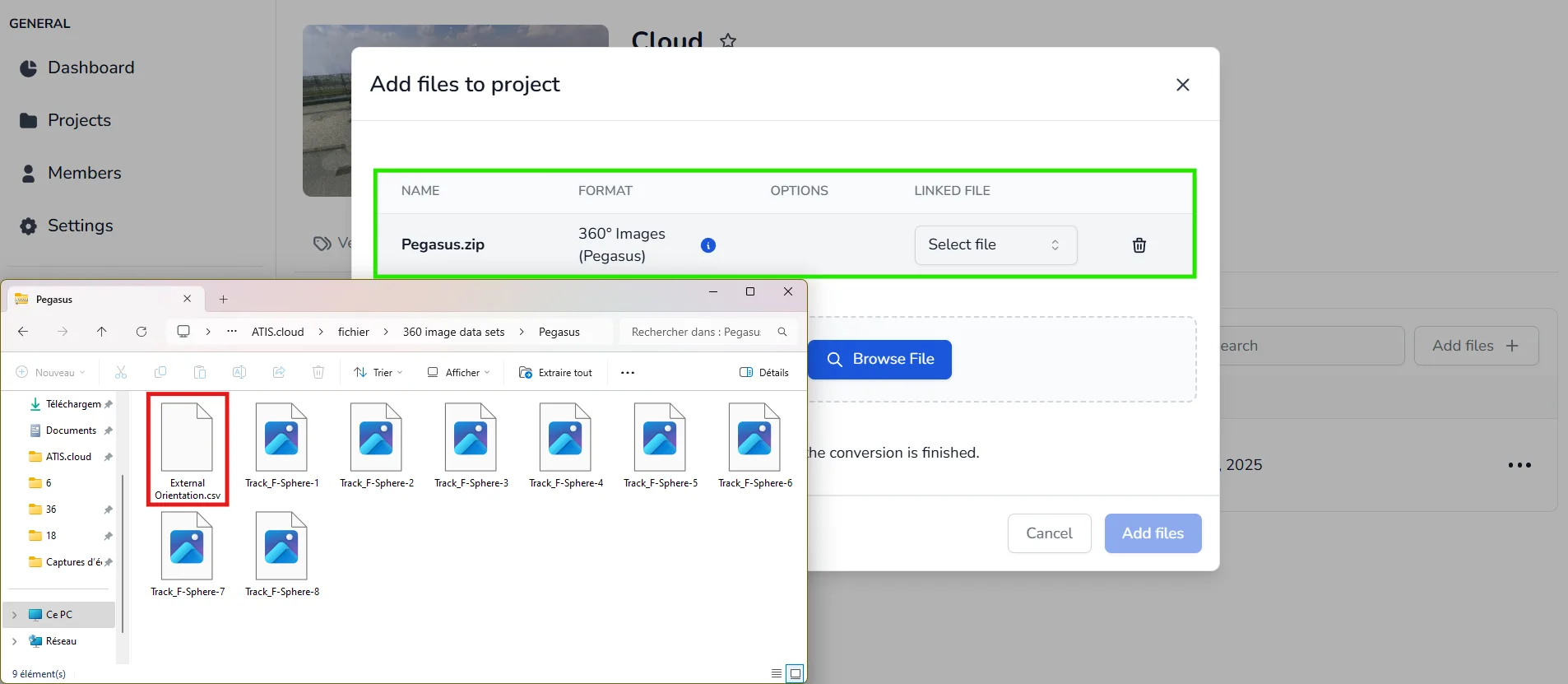
- Leica Pegasus
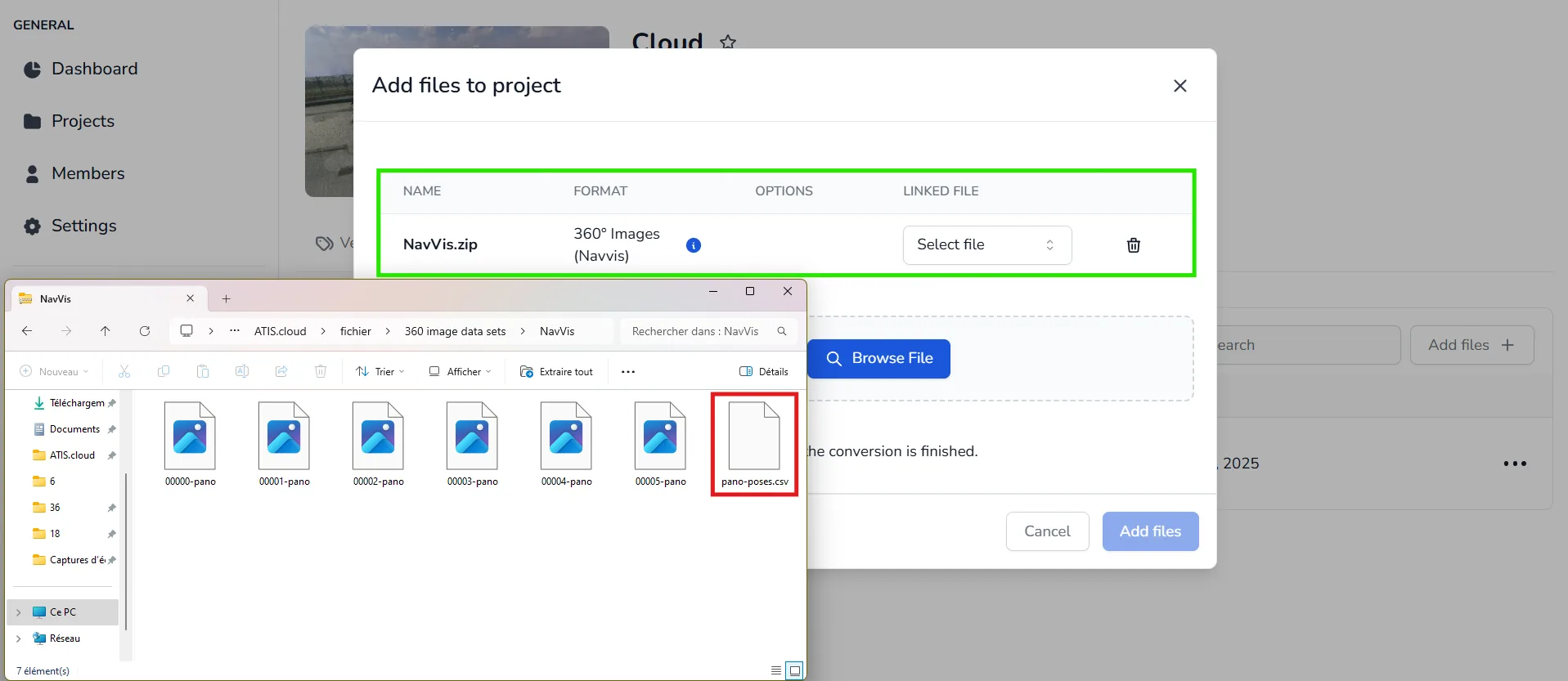
- NavVis
- FARO
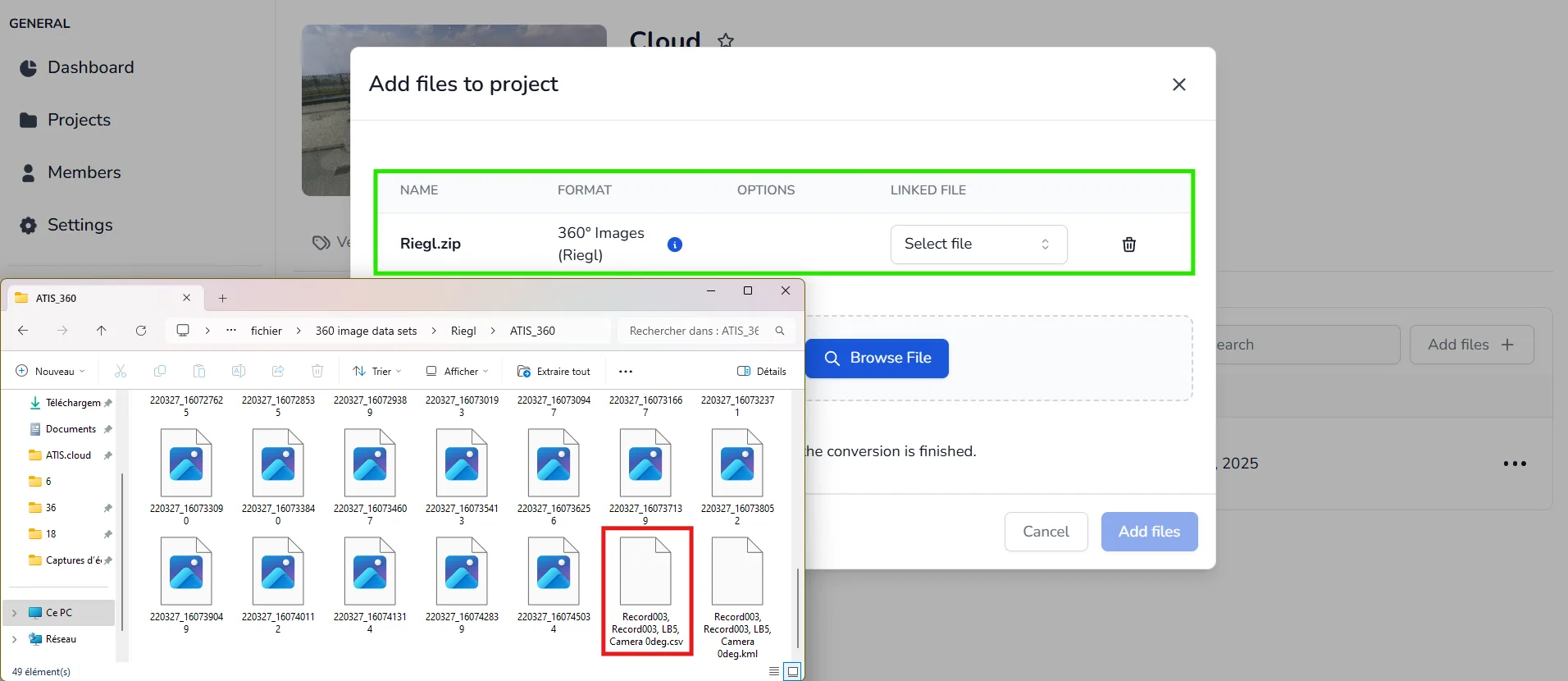
- Riegl
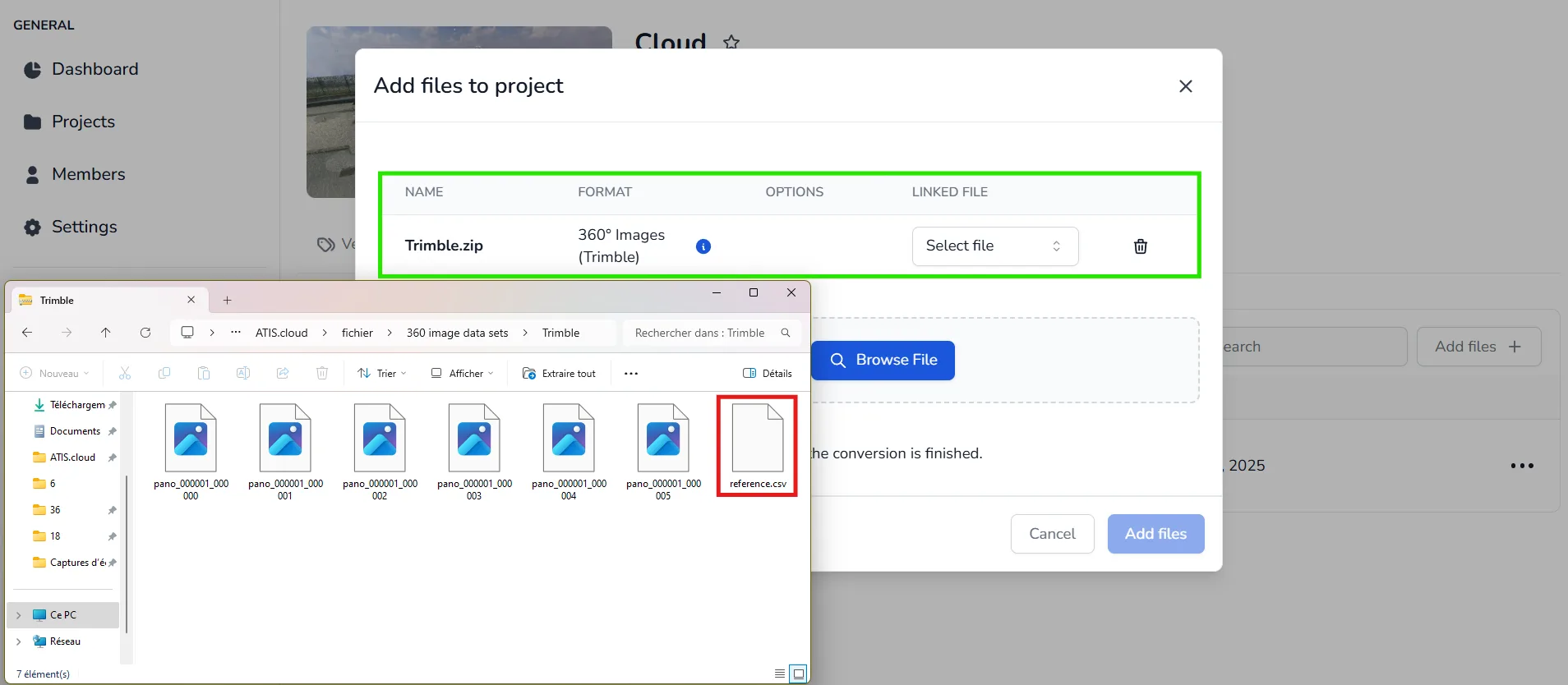
- Trimble MX9
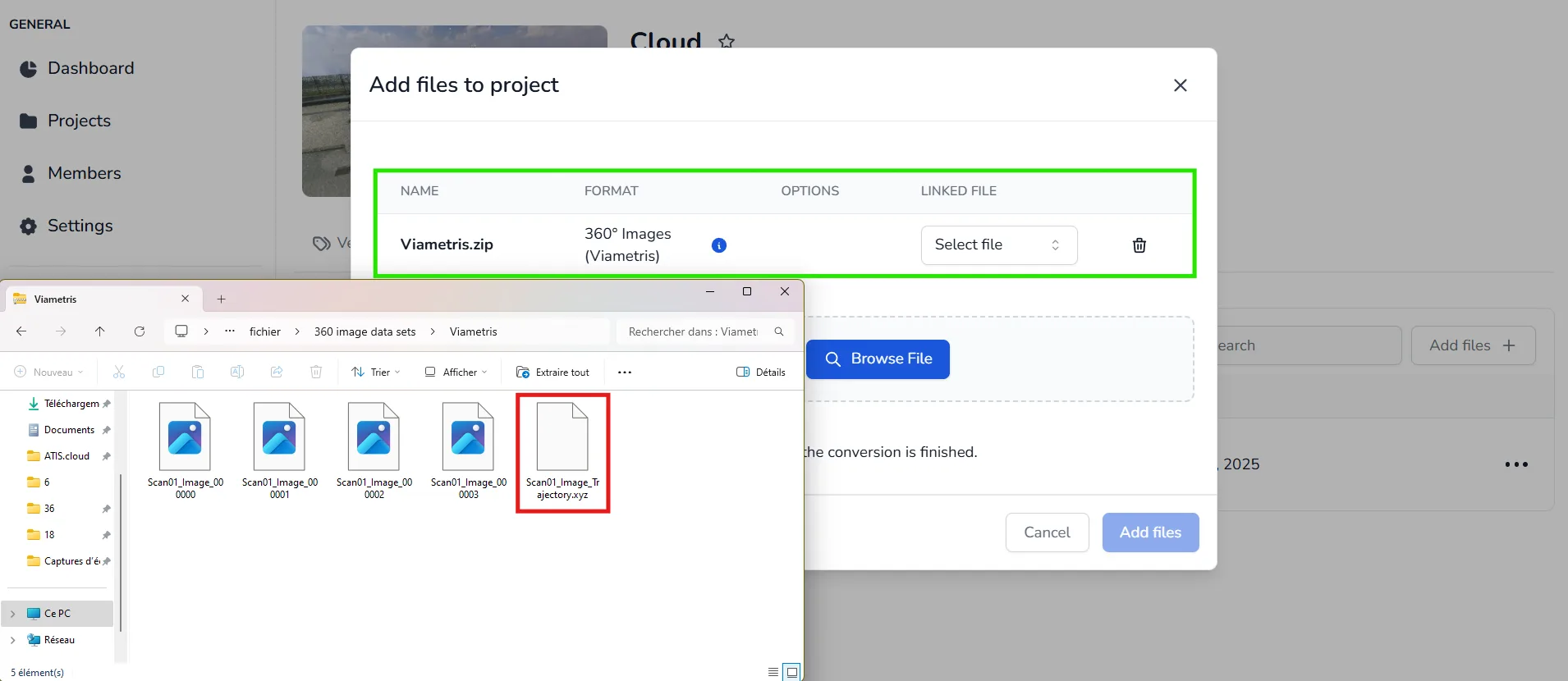
- Viametris
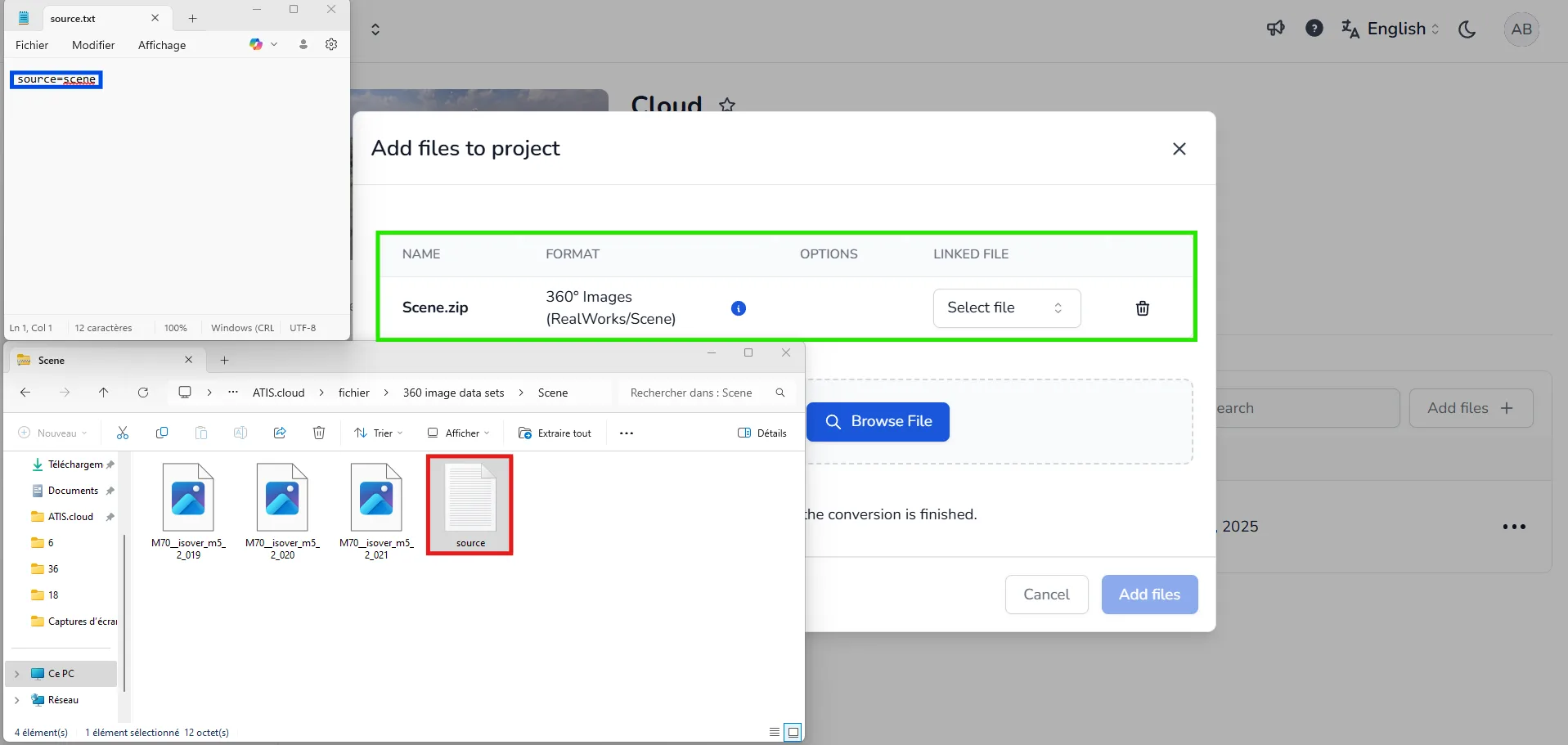
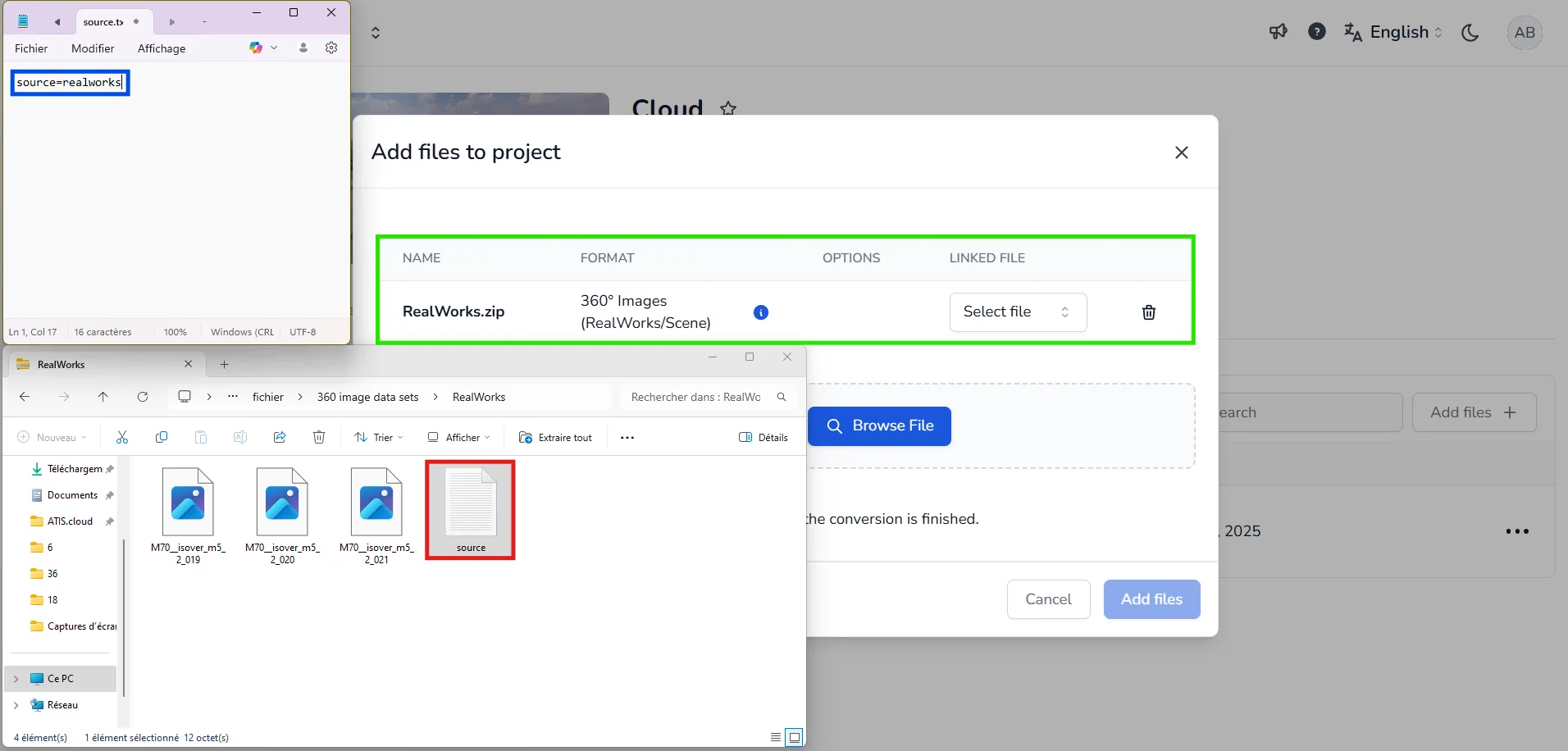
- Realworks
- Mosaic
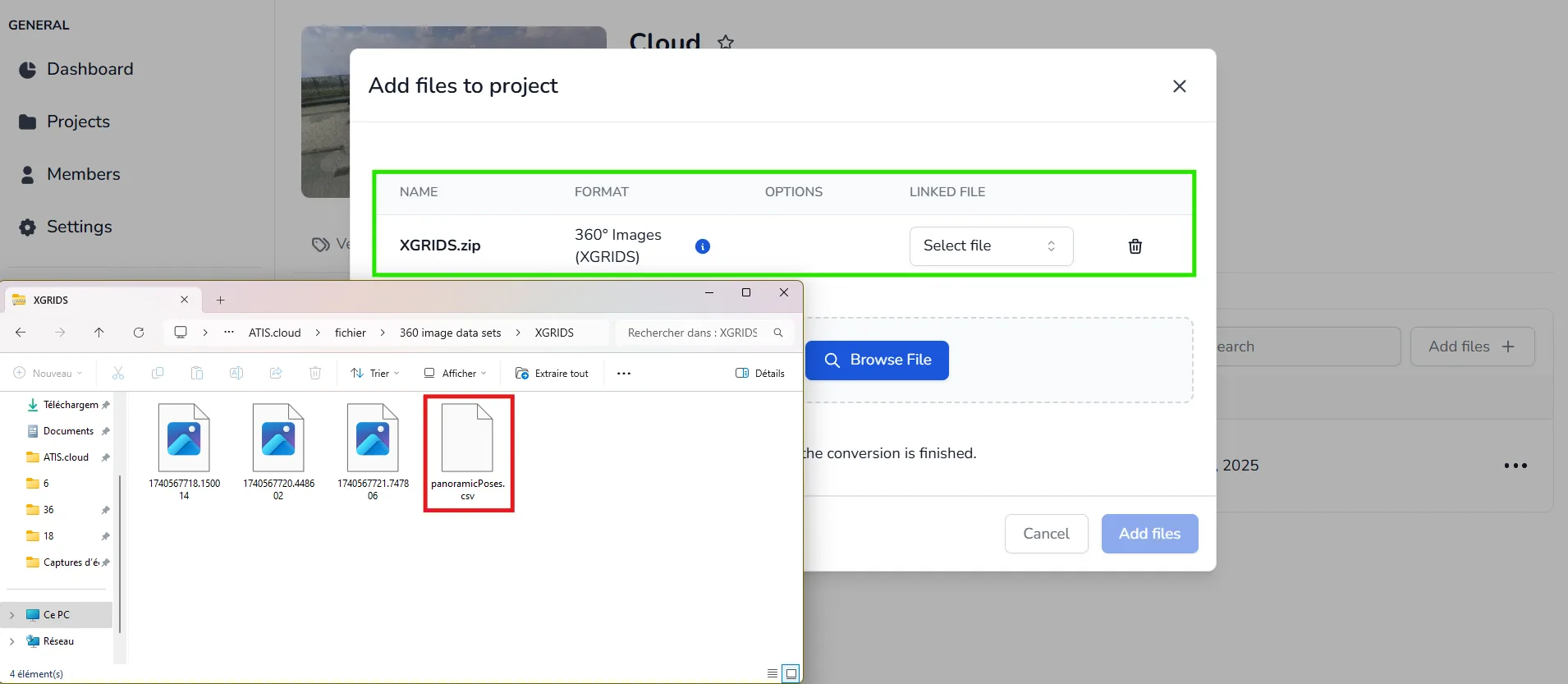
- XGRIDS
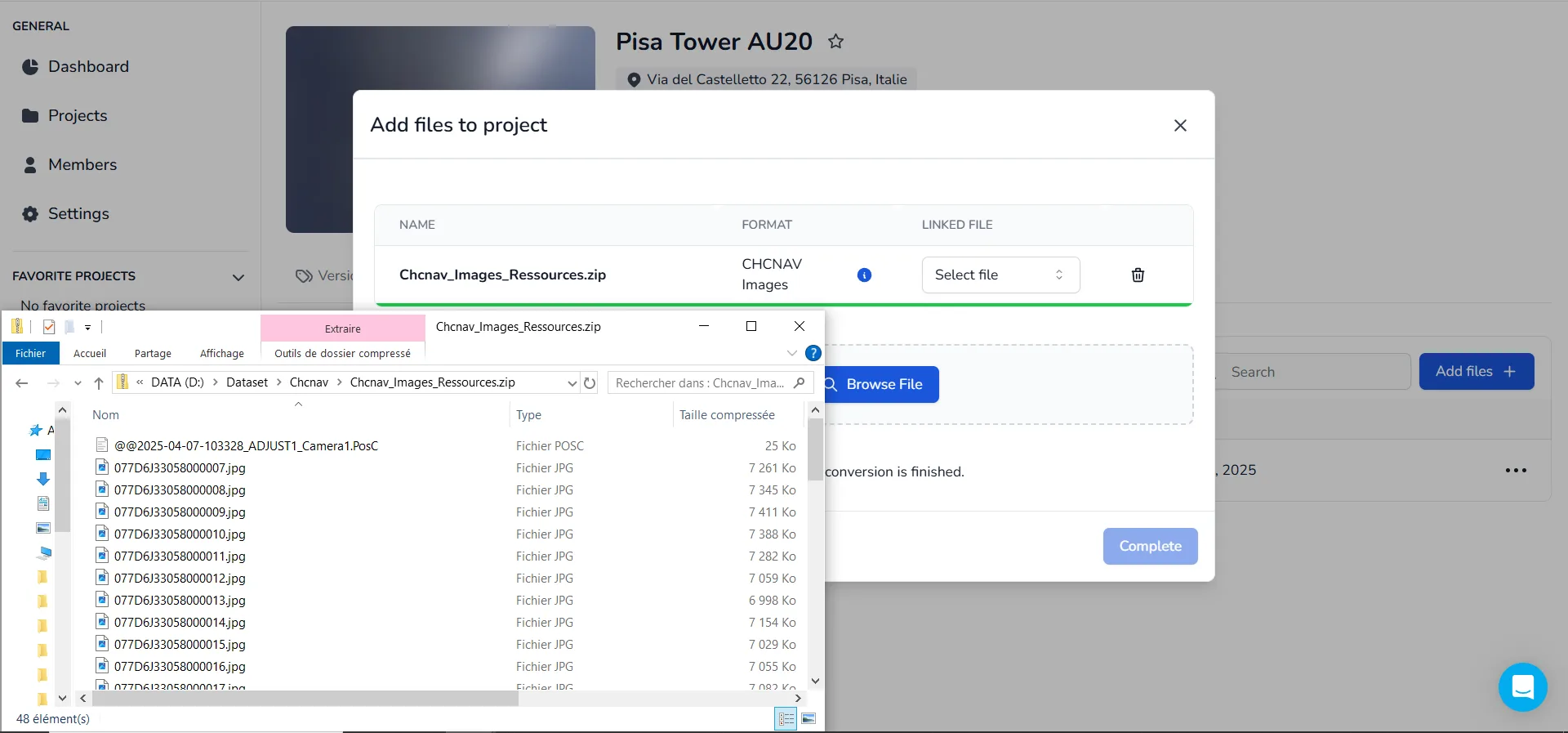
- CHCNAV
- 📂Utilice el archivo XML junto con sus imágenes y comprímalos todos en un .zip.📥
- Alternativamente, puede importar un archivo .LGSx que incluya sus imágenes de 360°, ya que este tipo de archivo es compatible.
- 📂Utilice el archivo "External Orientation.csv" junto con sus imágenes y comprímalos todos en un .zip.📥
- Alternativamente, puede importar un archivo .LGSx que incluya sus imágenes de 360°, ya que este tipo de archivo es compatible.
- 📂Utilice el archivo CSV junto con sus imágenes y comprímalos todos en un .zip.📥
- Alternativamente, puede importar un archivo E57 de NavVis que incluya sus imágenes de 360°. Puede consultar este artículo dedicado
- 📂Una vez que su archivo ZIP esté listo, cárguelo a su proyecto. El sistema detectará automáticamente si proviene de FARO Scene. Consulte la imagen de ejemplo para verificar la presencia del archivo
.txtrequerido dentro del ZIP, el cual es esencial para el reconocimiento y procesamiento correctos.📥 - Alternativamente, puede importar un archivo E57 de Faro Scene que incluya sus imágenes de 360°. Puede consultar este artículo dedicado
📂Utilice el archivo CSV junto con sus imágenes y comprímalos todos en un .zip.📥
📂Utilice el archivo CSV junto con sus imágenes y comprímalos todos en un .zip.📥
-
📂Utilice el archivo XYZ junto con sus imágenes y comprímalos todos en un .zip.📥
⚠️ Convención de nombres de las imágenes : Todas las imágenes de 360° deben seguir el formato de nombres requerido, por ejemplo: image_000000.jpg, image_000001.jpg, image_000002.jpg, y así sucesivamente, usando una secuencia numérica incremental continua.
-
Alternativamente, puede importar directamente un archivo E57 que incluya sus imágenes de 360°.
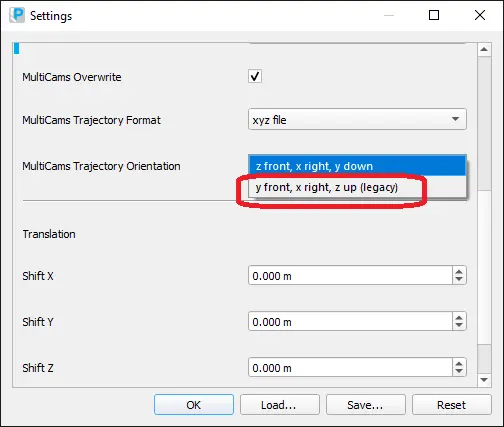
Tenga en cuenta que con la última versión del software PPiMMS, puede seleccionar la Orientación de la Trayectoria MultiCams. Actualmente la plataforma es compatible con la opción "y front, x right, z up (legacy)". Asegúrese de tener esta opción seleccionada antes de exportar las imágenes desde PPiMMS .
📂Una vez que su archivo ZIP esté listo, cárguelo a su proyecto. El sistema detectará automáticamente si proviene de Trimble Realworks. Consulte la imagen de ejemplo para verificar la presencia del archivo .txt requerido dentro del ZIP, el cual es esencial para el reconocimiento y procesamiento correctos.📥
📂Utilice el archivo CSV junto con sus imágenes y comprímalos todos en un .zip.📥
⬇️ Descargue el archivo de plantilla CSV para preparar la importación de las imágenes de Mosaic.
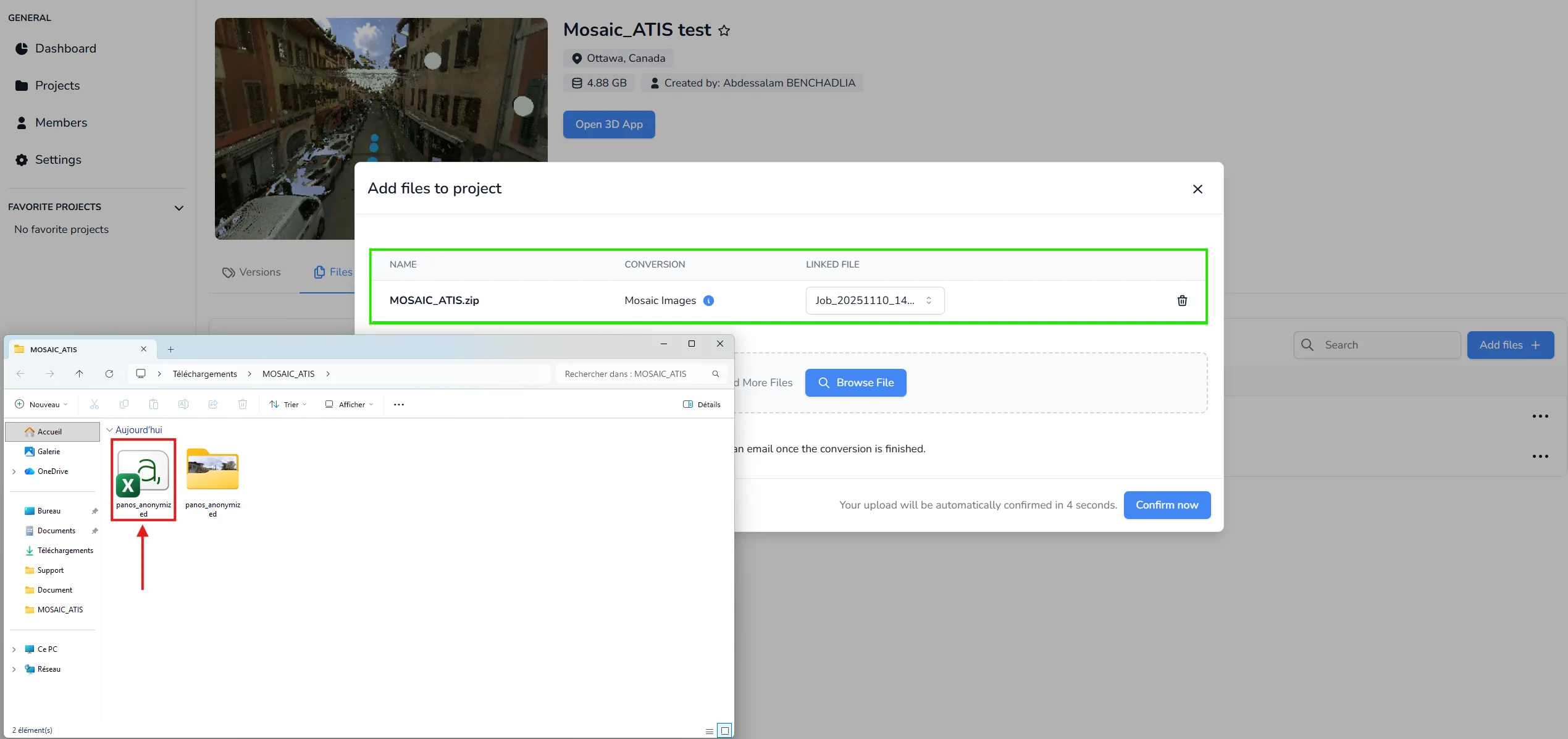
📂Utilice el archivo "panoramicPoses.csv" junto con sus imágenes y comprímalos todos en un .zip.📥
📂Utilice el archivo PosC junto con sus imágenes y comprímalos todos en un .zip. El archivo PosC sigue el formato "@@yy-mm-dd-id_ADJUST1_Camera1.PosC". El sistema detectará automáticamente si proviene de CHCNAV.📥 Puede consultar este artículo dedicado.
En caso de problema o dificultad, no dude en contactar con el equipo de la plataforma.