Atributos de la nube de puntos
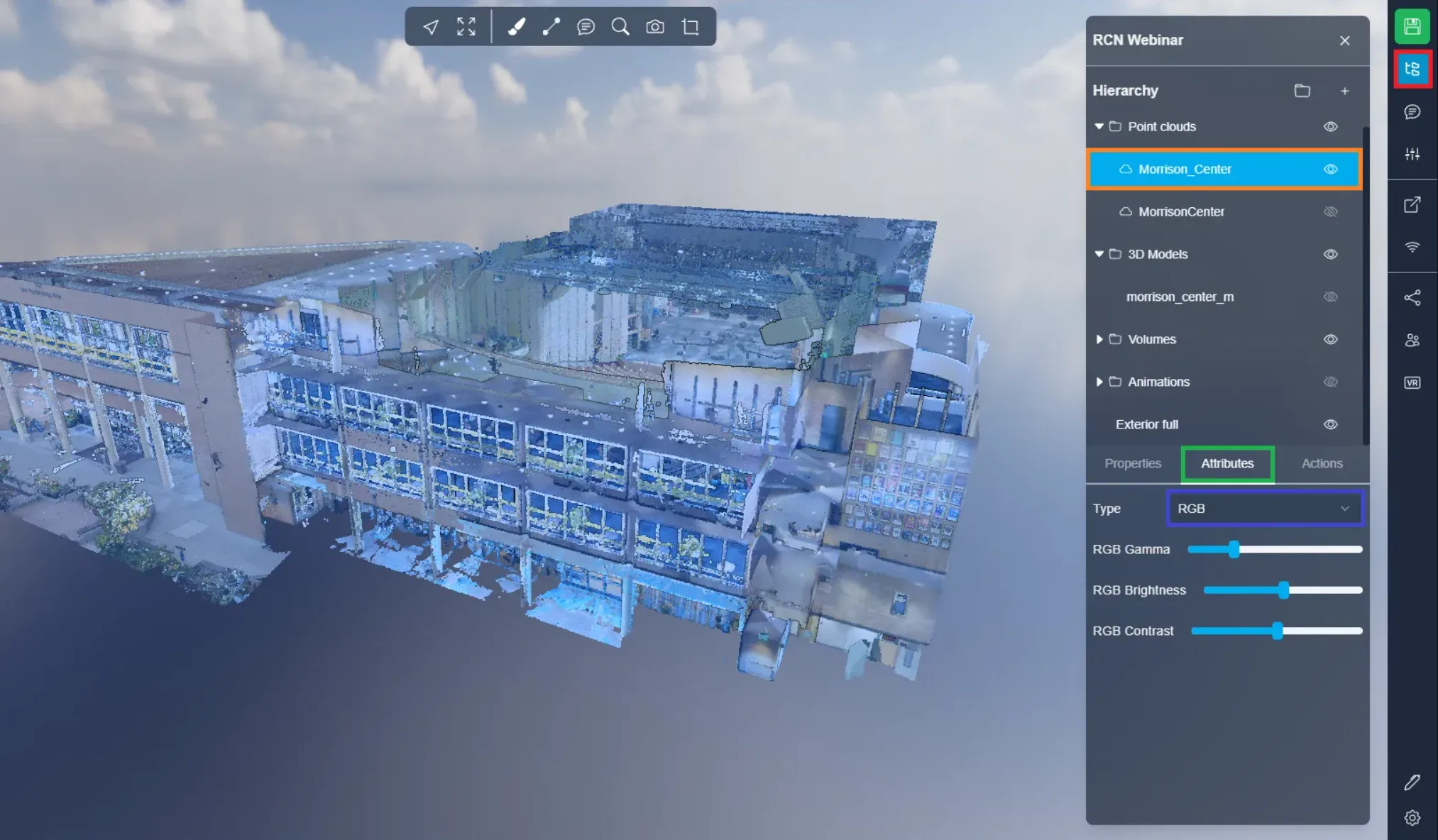
Para acceder a los atributos de una nube de puntos, abra el menú del proyecto y seleccione su nube de puntos. Haga clic en la pestaña de Atributos; debajo encontrará un menú desplegable con todos los atributos posibles. Seleccione el que desee usar. A continuación encontrará la lista de todos los atributos posibles y lo que hace cada uno.
-
Analizar : Solo funciona con nubes de puntos de análisis; para más información sobre el análisis, consulte este artículo.
- Nombre: Cambia el nombre de la nube de puntos
- Ver la posición
- Ver la rotación
- Ver la Escala
- Eliminar el análisis (solo lo elimina de la aplicación 3D; si es un análisis en el servidor, se puede volver a cargar más tarde)
-
Clasificación : Solo funcionará con nubes de puntos compatibles. El objetivo de la clasificación es agrupar puntos similares en categorías significativas, como suelo, vegetación, edificios y otros objetos.
- Mostrar / ocultar todo: muestra u oculta cada categoría
- Una línea por categoría: haga clic en la línea para mostrarla u ocultarla y en el color para cambiarlo
-
Color : Colorea toda la nube de puntos con un solo color
- Seleccione un color usando la paleta
- Use un código hexadecimal para seleccionar el color
- Elija uno de los colores de la lista predeterminada
-
Composición : Use esto si desea utilizar varias opciones al mismo tiempo; arrastre los controles deslizantes para aumentar o disminuir su uso.
- RGBA: Nube de puntos coloreada
- Gamma: Básicamente la exposición de la nube de puntos; un gamma más bajo equivale a mayor exposición y un gamma más alto a menor exposición, lo que da un aspecto de puesta de sol
- Brillo: El brillo de la nube de puntos; un brillo menor la hará más oscura y uno mayor, más clara.
- Contraste: Cambia el contraste de la nube de puntos; con menos contraste la nube de puntos se vuelve gris y con más contraste se sobreexponen los colores estándar (rojo, amarillo, verde, azul...)
- Intensidad: Fuerza o magnitud de la señal
- Rango: De intensidad baja a alta
- Gamma: Básicamente la exposición de la nube de puntos; un gamma más bajo equivale a mayor exposición y un gamma más alto a menor exposición, lo que da un aspecto de puesta de sol
- Brillo: El brillo de la nube de puntos; un brillo menor la hará más oscura y uno mayor, más clara.
- Contraste: Cambia el contraste de la nube de puntos; con menos contraste la nube de puntos se vuelve gris y con más contraste se sobreexponen los colores estándar (rojo, amarillo, verde, azul...)
- Elevación: Altura o posición vertical de cada punto
- Rango de elevación: establece a qué altura comienza y termina el gradiente
- Modo de gradiente
- Sujeción: Gradiente estándar; fuera del rango se mantiene el color final del borde
- Repetir: Cuando el gradiente termina, comienza de nuevo desde el color original
- Repetir en espejo: Cuando el gradiente termina, se añade un nuevo gradiente invertido; es similar a Repetir, pero sin discontinuidad en el color
- Esquema de gradiente: Cambia los colores del gradiente; solo se puede elegir de una lista predefinida
- Analizar: Solo si está disponible en esa nube de puntos, comparación entre modelo y nube de puntos
- Clasificación: Solo si está disponible en esa nube de puntos, divide diferentes tipos de objetos (suelo, vegetación, edificios...)
- Número de retornos: Cantidad de pulsos que fueron necesarios para obtener ese punto
- ID de fuente del punto: Agrupado por ID de escaneo
- RGBA: Nube de puntos coloreada
-
Elevación : Representa la altura o posición vertical de cada punto. Los datos de elevación son importantes en muchas aplicaciones de nubes de puntos, como mapeo topográfico, modelado de inundaciones, planificación urbana y diseño de infraestructura. Al analizar los datos de elevación, es posible crear modelos de elevación digital (DEM) precisos y detallados que se pueden usar para una amplia variedad de tareas de análisis y visualización geoespacial.
- Rango de elevación: establece a qué altura comienza y termina el gradiente
- Modo de gradiente
- Sujeción: Gradiente estándar; fuera del rango se mantiene el color final del borde
- Repetir: Cuando el gradiente termina, comienza de nuevo desde el color original
- Repetir en espejo: Cuando el gradiente termina, se añade un nuevo gradiente invertido; es similar a Repetir, pero sin discontinuidad en el color
- Esquema de gradiente: Cambia los colores del gradiente; solo se puede elegir de una lista predefinida
-
Tiempo GPS : El tiempo GPS es un atributo importante asociado a cada punto en la nube de puntos. Proporciona información sobre el momento en que se emitió el pulso láser y el momento en que se recibió el pulso de retorno, lo que permite calcular con precisión el rango y la posición del punto. Además, el tiempo GPS también se puede usar con fines de control de calidad y análisis. Al analizar la distribución de los valores del tiempo GPS en la nube de puntos, es posible identificar áreas con anomalías temporales o errores, que pueden indicar problemas con los datos o el sistema LiDAR.
-
Índices : Los índices son atributos asociados a cada punto en una nube de puntos LiDAR que proporcionan información adicional sobre las propiedades espaciales del punto y sus relaciones con otros puntos en la nube. Se utilizan a menudo en tareas avanzadas de análisis y procesamiento, como segmentación, clasificación y extracción de características. Hay varios tipos de índices que se pueden utilizar en el procesamiento de nubes de puntos LiDAR, entre ellos:
- Vector normal: Este índice representa la orientación del punto con respecto a su entorno local. Se puede usar para identificar superficies planas o para estimar las normales de superficie en la reconstrucción de superficies.
- Curvatura: Este índice representa la curvatura local de la superficie en el punto. Se puede usar para identificar bordes agudos o para estimar el radio de curvatura de superficies curvas.
- Altura sobre el suelo: Este índice representa la altura del punto sobre el suelo o una superficie de referencia. Se puede usar para el modelado del terreno o para identificar objetos que están por encima o por debajo de la superficie del suelo.
- Altura relativa: Este índice representa la altura del punto en relación con sus puntos vecinos. Se puede usar para identificar objetos que son más altos o más bajos que su entorno.
- Densidad: Este índice representa la densidad de puntos en el entorno local del punto. Se puede usar para identificar áreas con alta o baja densidad de puntos, como vegetación o fachadas de edificios.
-
Intensidad : Representa la fuerza o magnitud de la señal que recibió un sensor o dispositivo al capturar el punto. En algunos casos, la intensidad está relacionada con la reflectividad del objeto en ese punto. Por ejemplo, en una nube de puntos LiDAR, el valor de intensidad representa la cantidad de luz láser que el objeto reflejó de vuelta al sensor. En este caso, un valor de intensidad más alto indicaría una superficie que refleja más luz, como una pared blanca, mientras que un valor de intensidad más bajo indicaría una superficie que refleja menos luz, como un automóvil negro. En otros casos, la intensidad puede representar una cantidad física diferente. Por ejemplo, en una nube de puntos fotográfica, la intensidad puede representar el brillo de un píxel en la imagen original que se utilizó para generar la nube de puntos.
- Rango: De intensidad baja a alta
- Gamma: Básicamente la exposición de la nube de puntos; un gamma más bajo equivale a mayor exposición y un gamma más alto a menor exposición, lo que da un aspecto de puesta de sol
- Brillo: El brillo de la nube de puntos; un brillo menor la hará más oscura y uno mayor, más clara.
- Contraste: Cambia el contraste de la nube de puntos; con menos contraste la nube de puntos se vuelve gris y con más contraste se sobreexponen los colores estándar (rojo, amarillo, verde, azul...)
-
Gradiente de intensidad : Es una medida del cambio en intensidad entre puntos vecinos en una nube de puntos. Representa la tasa a la que cambia la intensidad con respecto a la distancia o posición. El gradiente de intensidad se calcula tomando el gradiente de los valores de intensidad en la nube de puntos. Esto implica calcular las derivadas parciales de los valores de intensidad con respecto a las coordenadas x, y y z de cada punto. La magnitud del vector gradiente en cada punto representa el valor del gradiente de intensidad. Los valores altos de gradiente de intensidad indican bordes o límites agudos, mientras que los valores bajos indican transiciones suaves o graduales.
- Rango: De intensidad baja a alta
- Gamma: Básicamente la exposición de la nube de puntos; un gamma más bajo equivale a mayor exposición y un gamma más alto a menor exposición, lo que da un aspecto de puesta de sol
- Brillo: El brillo de la nube de puntos; un brillo menor la hará más oscura y uno mayor, más clara.
- Contraste: Cambia el contraste de la nube de puntos; con menos contraste la nube de puntos se vuelve gris y con más contraste se sobreexponen los colores estándar (rojo, amarillo, verde, azul...)
-
Nivel de detalle : En el procesamiento de nubes de puntos LiDAR, el nivel de detalle (LOD) puede referirse a la densidad de puntos en la nube de puntos, la resolución de los datos o el nivel de abstracción utilizado para representar los datos. Por ejemplo, una nube de puntos con un alto nivel de detalle tendría una alta densidad de puntos, una alta resolución y un nivel de abstracción fino. Por el contrario, una nube de puntos con un bajo nivel de detalle tendría una densidad de puntos más baja, una resolución más baja y un nivel de abstracción grueso.
-
Matcap : En el procesamiento de nubes de puntos LiDAR, el matcap puede usarse para agregar texturas visuales y efectos de sombreado a modelos 3D creados a partir de nubes de puntos. Al aplicar una textura matcap a un modelo 3D, es posible crear una representación de la escena más realista y visualmente atractiva. Por ejemplo, se podría usar una textura matcap para simular la apariencia de una pared de concreto o de la corteza de un árbol, lo que agrega profundidad y realismo al modelo 3D.
- Seleccione la textura a aplicar
-
Número de devoluciones : Representa el número total de pulsos láser que se emitieron y regresaron al sensor LiDAR para capturar ese punto en particular. Al igual que el número de retornos, el número de devoluciones puede variar de 1 a 5 o más, según el sistema LiDAR utilizado. El número total de devoluciones puede proporcionar información sobre la complejidad y estructura del objeto o escena que se está escaneando. Por ejemplo, un punto con un alto número de devoluciones puede indicar un objeto con varias capas o geometría compleja, como la copa de un árbol o la fachada de un edificio.
-
ID de fuente del punto : Identifica el sensor láser específico que generó el punto. Cada sensor láser en un sistema LiDAR tiene un ID o número único, y esta información se registra en los datos de la nube de puntos para permitir el análisis y control de calidad. La ID de fuente del punto es particularmente útil cuando se utilizan varios sensores LiDAR para capturar una misma escena o área. Al identificar qué sensor generó cada punto, es posible realizar verificaciones de control de calidad y asegurarse de que los datos estén correctamente alineados y registrados entre los distintos sensores. Esto es especialmente importante en aplicaciones como la silvicultura, donde pueden usarse varios sensores LiDAR para capturar datos desde diferentes ángulos y perspectivas. En nuestra plataforma, la ID de fuente del punto se usa para almacenar la ID de escaneo de origen, lo que permite a los usuarios saber fácilmente de qué escaneo proviene cada punto de la nube. Por ejemplo, si se realizaron varios escaneos de la misma área con un escáner láser 3D, a cada escaneo se le podría asignar una ID de escaneo única, y el atributo de ID de fuente del punto de cada punto de la nube podría establecerse con la ID de escaneo correspondiente.
-
RGBA : Se usa para representar el color de cada punto en la nube de puntos. Los canales rojo, verde y azul se usan para representar el color del punto, mientras que el canal alfa se usa para representar la transparencia u opacidad del punto. El uso del color en las nubes de puntos LiDAR resulta útil para la visualización y la interpretación, ya que puede proporcionar información adicional sobre las propiedades de los objetos y superficies representados por los puntos. Por ejemplo, en el mapeo de vegetación, el color de los puntos se puede usar para distinguir entre diferentes tipos de vegetación o para identificar áreas de alta o baja densidad de vegetación.
- Gamma: Básicamente la exposición de la nube de puntos; un gamma más bajo equivale a mayor exposición y un gamma más alto a menor exposición, lo que da un aspecto de puesta de sol
- Brillo: El brillo de la nube de puntos; un brillo menor la hará más oscura y uno mayor, más clara.
- Contraste: Cambia el contraste de la nube de puntos; con menos contraste la nube de puntos se vuelve gris y con más contraste se sobreexponen los colores estándar (rojo, amarillo, verde, azul...)
-
Número de retorno : Representa la cantidad de veces que se emitió un pulso láser y regresó al sensor LiDAR para capturar ese punto en particular. Al igual que el número de devoluciones, el número de retorno suele ser un valor entre 1 y 5, donde 1 indica el primer retorno y 5 el quinto. El primer retorno representa el pulso láser que se refleja desde la superficie superior del objeto, mientras que los retornos subsiguientes pueden representar reflexiones desde superficies más bajas o múltiples reflexiones dentro del objeto.
-
Rango del ángulo de escaneo : Representa el ángulo entre el haz láser y la línea de referencia del escáner cuando se emitió el pulso láser para capturar ese punto en particular. El rango del ángulo de escaneo proporciona información sobre el ángulo en el que se capturó el punto: un valor de 0 corresponde a la línea de referencia del escáner, y los valores positivos o negativos indican la desviación respecto a esa línea. En la extracción de edificios, el rango del ángulo de escaneo se puede usar para identificar fachadas de edificios y estructuras de techos basadas en su orientación con respecto a la línea de referencia del escáner. En el análisis de superficies de carreteras, el rango del ángulo de escaneo se puede usar para detectar defectos o irregularidades en la superficie en función del ángulo del escáner con respecto a la superficie de la carretera.
-
Datos de usuario : Permite a los usuarios agregar información adicional a la nube de puntos más allá de los atributos estándar como coordenadas XYZ, intensidad y número de retorno. Los datos de usuario se pueden usar para almacenar una amplia gama de información, como valores de color RGB, etiquetas de clasificación o metadatos asociados con el punto. Por ejemplo, los datos de usuario podrían usarse para indicar si un punto es parte de un edificio, un árbol o una carretera, o para almacenar información sobre la calidad de la medición del punto o su incertidumbre. El uso de datos de usuario depende de las necesidades y aplicaciones específicas del usuario. Se puede utilizar en una variedad de tareas, como reconocimiento de objetos, clasificación, segmentación y mapeo. Al agregar datos de usuario personalizados a una nube de puntos, es posible extraer información más significativa y realizar tareas de análisis y procesamiento más avanzadas.
Si al principio su nube de puntos no se muestra correctamente, pruebe con los atributos RGBA o de intensidad, ya que son los más utilizados.
Obtenga más información sobre las propiedades de las nubes de puntos en este artículo.
Si encuentra algún problema, nuestro equipo de soporte está a su disposición para ayudarle. ¡Disfrute de la exploración!