Exportieren von 360°-Bildern aus Mosaic Processor
Dieser Leitfaden erklärt, wie Sie 360°-Panoramabilder aus dem Mosaic Processor exportieren, um sie auf der Plattform zu verwenden.
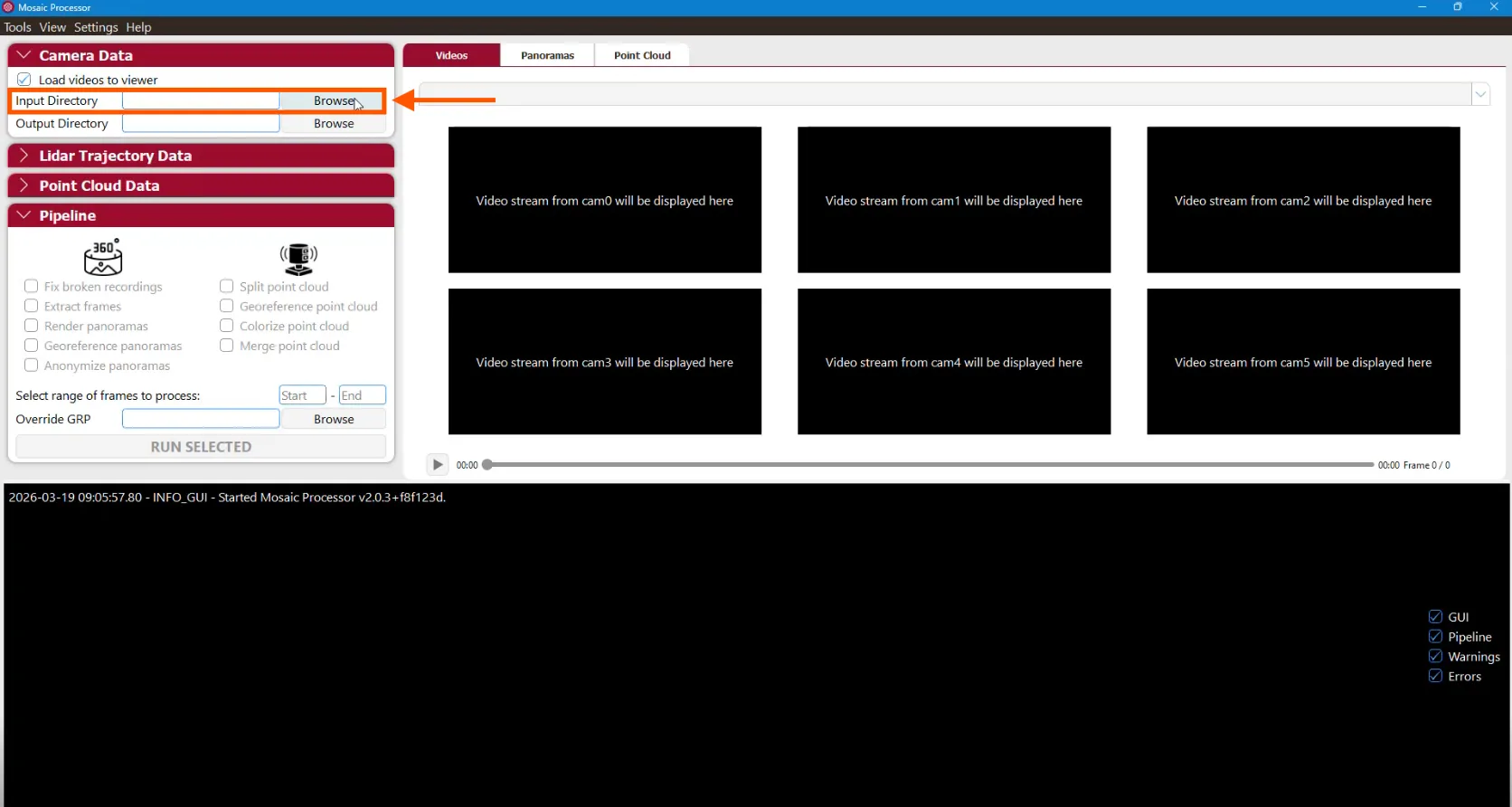
Schritt 1: Eingabeverzeichnis laden
Beginnen Sie mit der Auswahl Ihres Datensatzes:
-
Klicken Sie auf Durchsuchen neben dem Eingabeverzeichnis
-
Wählen Sie den Ordner aus, der Ihre Aufnahmedaten enthält
Sobald ausgewählt, erscheinen die Videostreams in der Anwendung.
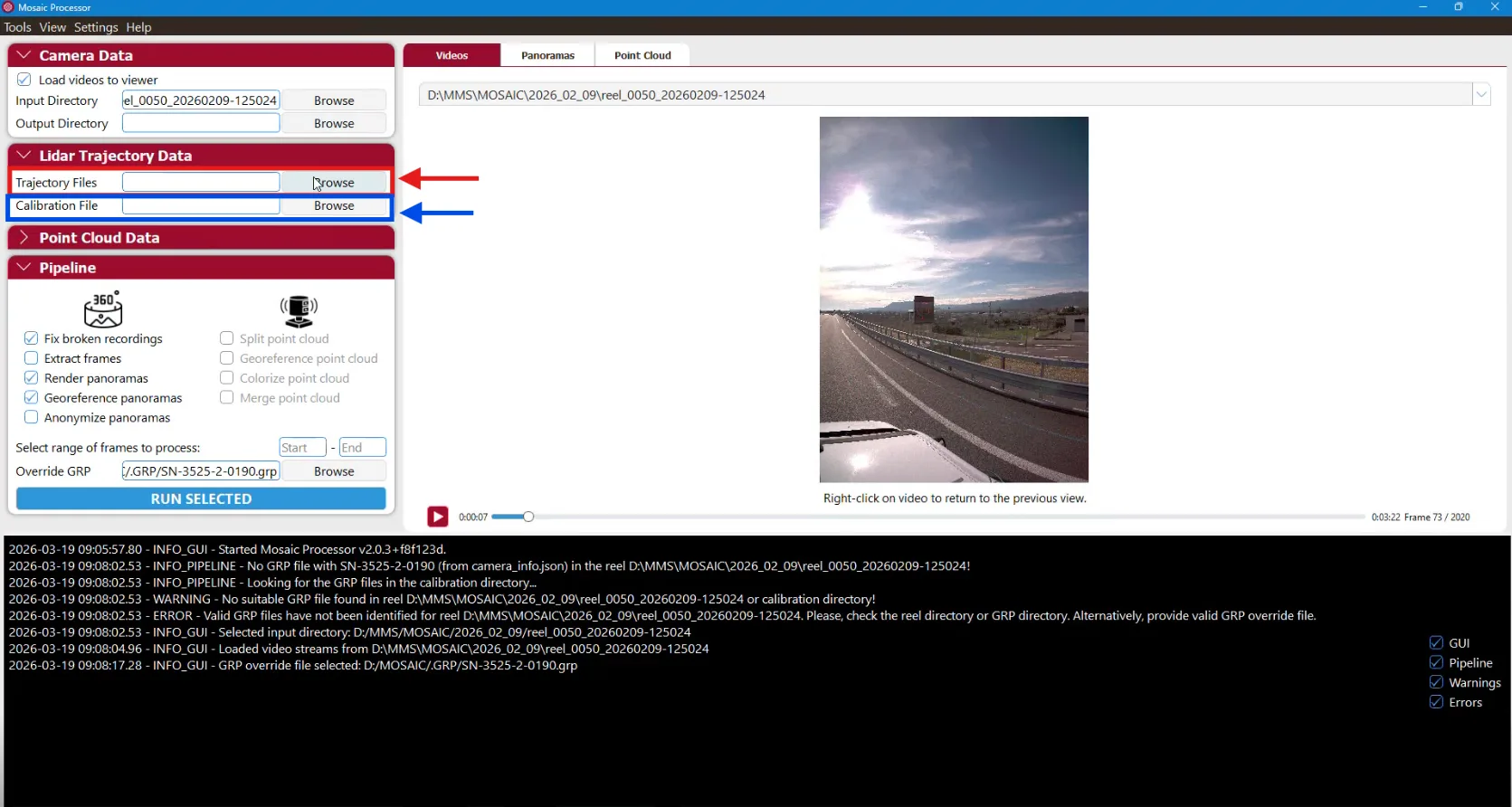
Schritt 2: Trajektorie- und Kalibrierungsdateien hinzufügen
Sie müssen nun die erforderlichen Positionsdaten bereitstellen:
- Wählen Sie unter Trajektorie-Dateien die CSV-Trajektoriedatei aus
- Wählen Sie unter Kalibrierungsdatei die Kalibrierungsdatei aus (typischerweise .yaml)
Diese Dateien sind erforderlich, um die Panoramen korrekt zu positionieren und auszurichten.
Schritt 3: Exporteinstellungen konfigurieren
Im Abschnitt Pipeline stellen Sie sicher, dass die folgenden Optionen aktiviert sind:
- Beschädigte Aufnahmen reparieren
- Panoramen rendern
- Panoramen georeferenzieren
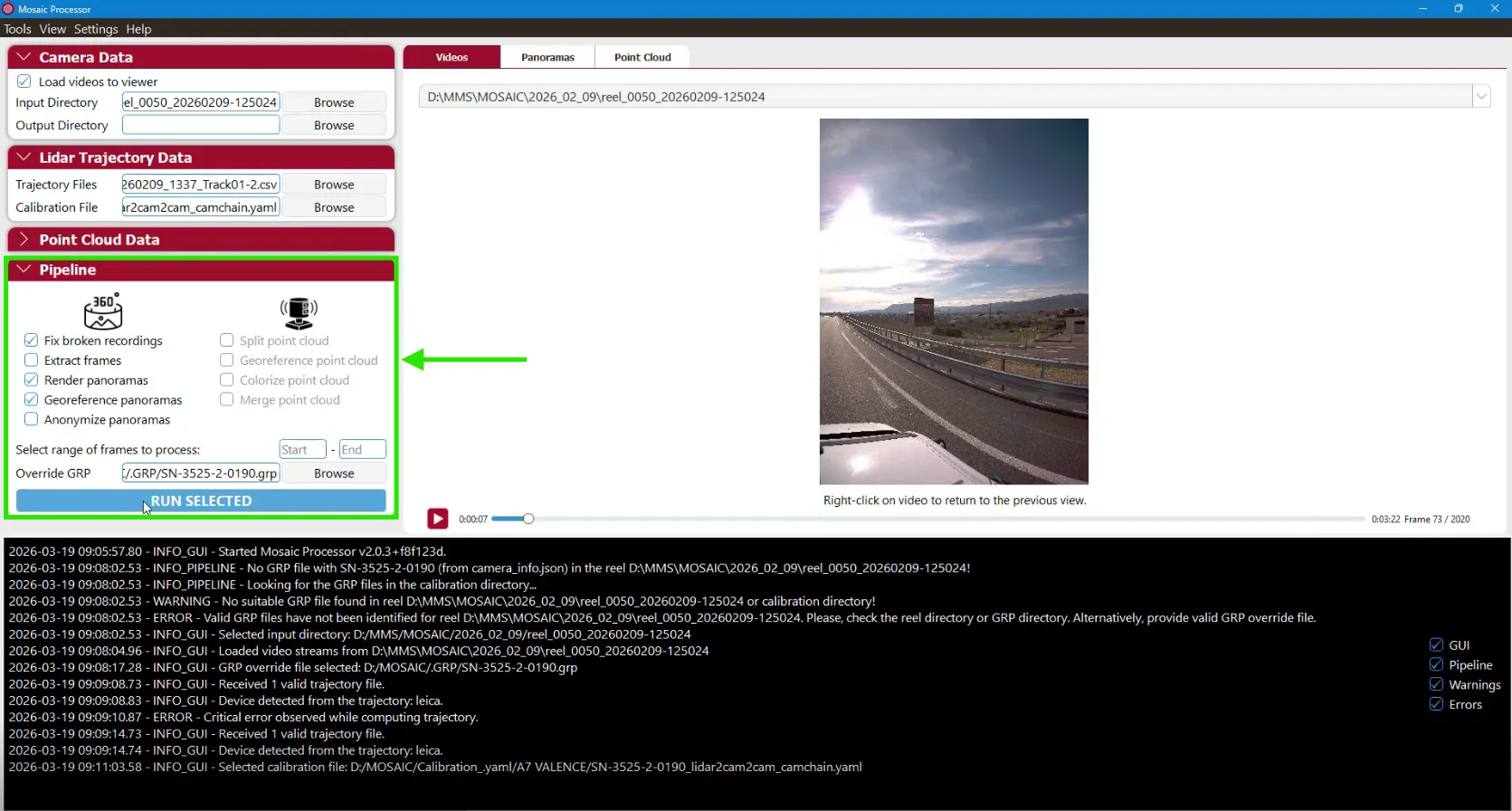
Diese Einstellungen sorgen dafür, dass Frames ordnungsgemäß extrahiert werden, 360°-Bilder generiert und Panoramen korrekt im Raum positioniert werden.
Sobald alle Einstellungen konfiguriert sind, klicken Sie auf AUSGEWÄHLTES AUSFÜHREN, um den Prozess zu starten. Der Mosaic Processor extrahiert automatisch Frames, generiert die 360°-Panoramen und wendet die Georeferenzierung basierend auf den bereitgestellten Trajektorie- und Kalibrierungsdateien an.
Wichtige Hinweise
- Stellen Sie sicher, dass Ihre Trajektorie- und Kalibrierungsdateien zum Datensatz passen
- Falsche oder fehlende Dateien können zu falsch positionierten Panoramen führen
- Überprüfen Sie immer, ob die erforderlichen Pipeline-Optionen aktiviert sind, bevor Sie den Prozess starten
Wenn Sie Fragen haben oder weitere Unterstützung benötigen, kontaktieren Sie bitte das technische Team.