Punktwolkenattribute
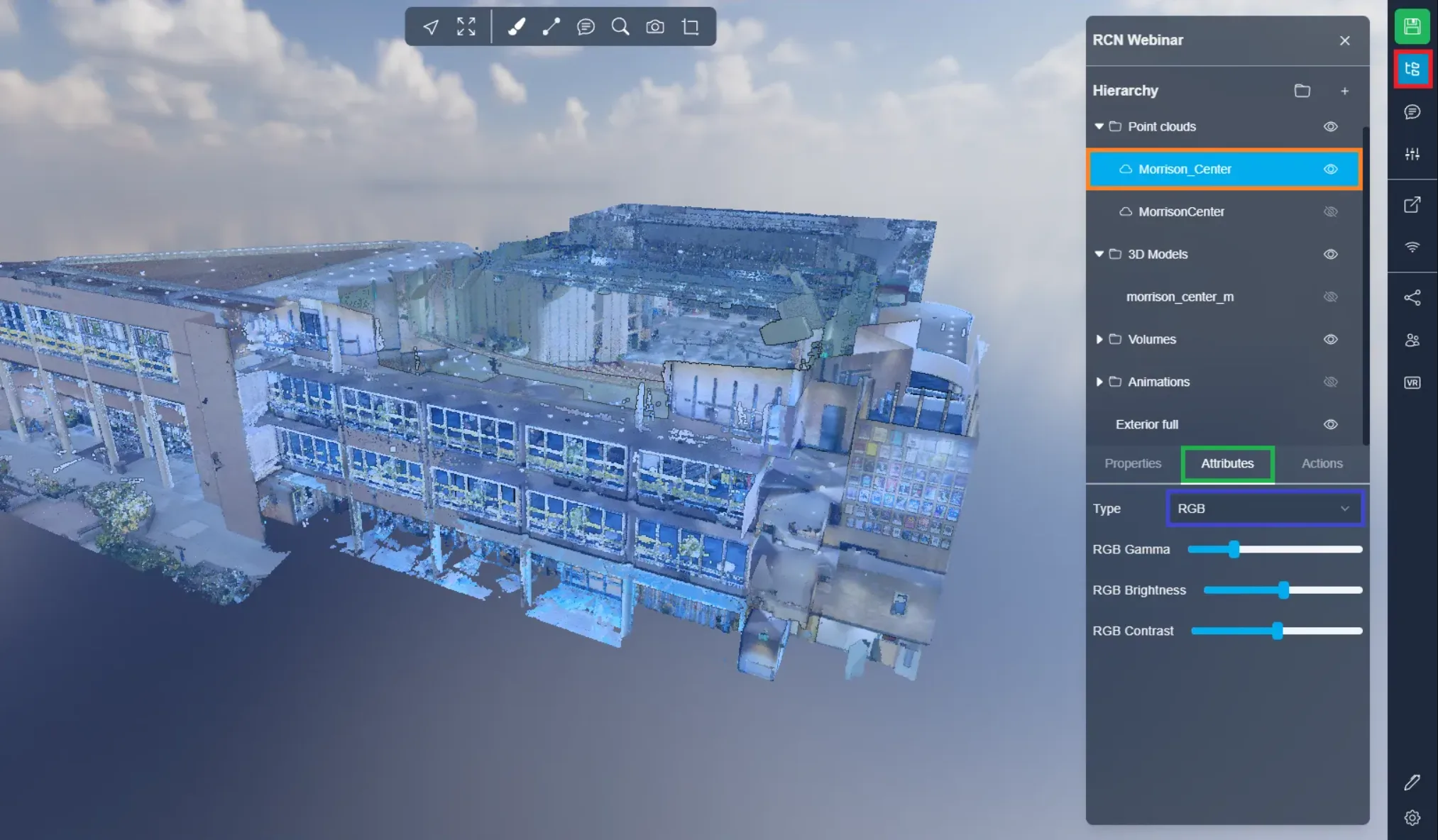
Um auf die Attribute einer Punktwolke zuzugreifen, öffnen Sie das Projektmenü und wählen Sie Ihre Punktwolke aus. Klicken Sie auf den Reiter Attribute, unten finden Sie ein Dropdown-Menü, das alle möglichen Attribute auflistet. Wählen Sie das gewünschte Attribut aus. Eine Liste aller möglichen Attribute und deren Funktionen finden Sie unten.
-
Analyse: Funktioniert nur mit Analysedatenwolken. Weitere Informationen zur Analyse finden Sie in diesem Artikel.
- Name: Ändern Sie den Namen der Punktwolke
- Position ansehen
- Rotation ansehen
- Maßstab ansehen
- Analyse löschen (wird nur aus der 3D-App gelöscht, kann später erneut geladen werden, wenn es sich um eine serverseitige Analyse handelt)
-
Klassifikation: Funktioniert nur mit kompatiblen Punktwolken. Ziel der Klassifikation ist es, ähnliche Punkte in sinnvolle Kategorien zu gruppieren, wie z. B. Boden, Vegetation, Gebäude und andere Objekte.
- Alle anzeigen/ausblenden: zeigt oder verbirgt alle Kategorien
- Eine Zeile pro Kategorie, klicken Sie auf die Zeile, um sie anzuzeigen oder auszublenden, klicken Sie auf die Farbe, um sie zu ändern
-
Farbe: Färbt die gesamte Punktwolke mit einer Farbe ein.
- Wählen Sie eine Farbe mit der Palette aus
- Verwenden Sie einen Hexadezimalcode, um die Farbe auszuwählen
- Wählen Sie eine Farbe aus der Standardliste
-
Komposit: Verwenden Sie dies, wenn Sie mehrere Optionen gleichzeitig nutzen möchten, ziehen Sie die Schieberegler, um deren Nutzung zu erhöhen/zu verringern.
- RGBA: Kolorierte Punktwolke
- Gamma: Im Wesentlichen die Belichtung der Punktwolke, ein niedrigerer Gamma-Wert entspricht einer höheren Belichtung, ein höherer Gamma-Wert einer niedrigeren Belichtung, ergibt ein Sonnenuntergangslook
- Helligkeit: Die Helligkeit der Punktwolke, niedrigere Helligkeit macht sie dunkler, höhere Helligkeit macht sie heller.
- Kontrast: Ändert den Kontrast der Punktwolke, niedrigerer Kontrast lässt die Punktwolke grau erscheinen, höherer Kontrast überbelichtet die Standardfarben (rot, gelb, grün, blau...)
- Intensität: Stärke oder Größe des Signals
- Bereich: Von niedriger bis hoher Intensität
- Gamma: Im Wesentlichen die Belichtung der Punktwolke, ein niedrigerer Gamma-Wert entspricht einer höheren Belichtung, ein höherer Gamma-Wert einer niedrigeren Belichtung, ergibt ein Sonnenuntergangslook
- Helligkeit: Die Helligkeit der Punktwolke, niedrigere Helligkeit macht sie dunkler, höhere Helligkeit macht sie heller.
- Kontrast: Ändert den Kontrast der Punktwolke, niedrigerer Kontrast lässt die Punktwolke grau erscheinen, höherer Kontrast überbelichtet die Standardfarben (rot, gelb, grün, blau...)
- Höhenlage: Höhe oder vertikale Position jedes Punktes
- Höhenbereich: Stellen Sie ein, wo der Verlauf in Bezug auf die Höhe beginnt und endet
- Verlaufsmodus
- Klemmen: Standardverlauf, außerhalb des Bereichs bleibt die endgültige Farbe des Randes
- Wiederholen: Wenn der Verlauf endet, beginnt er erneut mit der Originalfarbe
- Spiegelwiederholung: Wenn der Verlauf endet, wird ein neuer umgekehrter Verlauf hinzugefügt, ähnlich wie Wiederholen, außer dass keine Farbunterbrechungen vorhanden sind
- Verlaufschema: Ändert die Farben des Verlaufs, nur Auswahl aus einer vordefinierten Liste
- Analyse: Nur wenn auf dieser Punktwolke verfügbar, Modell-zu-Punktwolke-Vergleich
- Klassifikation: Nur wenn auf dieser Punktwolke verfügbar, trennt verschiedene Objekttypen (Boden, Vegetation, Gebäude...)
- Rückkehrnummer: Anzahl der Pulse, die benötigt wurden, um diesen Punkt zu erhalten
- Punktsource-ID: Gruppiert nach Scan-ID
- RGBA: Kolorierte Punktwolke
-
Höhenlage: Es stellt die Höhe oder vertikale Position jedes Punktes dar. Höhendaten sind in vielen Anwendungen von Punktwolken wichtig, z. B. bei topografischer Kartierung, Hochwassermodellierung, Stadtplanung und Infrastrukturdesign. Durch die Analyse der Höhendaten ist es möglich, genaue und detaillierte digitale Höhenmodelle (DEMs) zu erstellen, die für eine Vielzahl von geospatialen Analyse- und Visualisierungszwecken verwendet werden können.
- Höhenbereich: Legt fest, wo der Verlauf in Bezug auf die Höhe beginnt und endet
- Verlaufsmodus
- Klemmen: Standardverlauf, außerhalb des Bereichs bleibt die endgültige Farbe des Randes
- Wiederholen: Wenn der Verlauf endet, beginnt er erneut mit der Originalfarbe
- Spiegelwiederholung: Wenn der Verlauf endet, wird ein neuer umgekehrter Verlauf hinzugefügt, ähnlich wie Wiederholen, außer dass keine Farbunterbrechungen vorhanden sind
- Verlaufschema: Ändert die Farben des Verlaufs, nur Auswahl aus einer vordefinierten Liste
-
GPS-Zeit: GPS-Zeit ist ein wichtiges Attribut, das mit jedem Punkt in der Punktwolke verbunden ist. Es liefert Informationen über die Zeit, zu der der Laserpuls ausgesendet und zu der der Rückpuls empfangen wurde, was eine genaue Berechnung der Reichweite und Position des Punktes ermöglicht. Darüber hinaus kann die GPS-Zeit auch für Qualitätskontrolle und Analysezwecke verwendet werden. Durch die Analyse der Verteilung der GPS-Zeitwerte innerhalb der Punktwolke können Bereiche mit zeitlichen Anomalien oder Fehlern identifiziert werden, die auf Probleme mit den Daten oder dem LiDAR-System hinweisen können.
-
Indizes: Indizes sind Attribute, die mit jedem Punkt in einer LiDAR-Punktwolke verbunden sind und zusätzliche Informationen über die räumlichen Eigenschaften des Punktes und seine Beziehungen zu anderen Punkten in der Wolke liefern. Sie werden oft verwendet, um fortgeschrittene Analyse- und Verarbeitungsvorgänge zu unterstützen, wie z. B. Segmentierung, Klassifikation und Merkmalserkennung. Es gibt verschiedene Arten von Indizes, die in der LiDAR-Punktwolkendatenverarbeitung verwendet werden können, darunter:
- Normalvektor: Dieser Index stellt die Orientierung des Punktes relativ zu seiner lokalen Nachbarschaft dar. Er kann verwendet werden, um ebene Flächen zu identifizieren oder Oberflächennormalen für die Oberflächenrekonstruktion zu schätzen.
- Krümmung: Dieser Index stellt die lokale Krümmung der Oberfläche an diesem Punkt dar. Er kann verwendet werden, um scharfe Kanten zu identifizieren oder den Krümmungsradius für gekrümmte Oberflächen zu schätzen.
- Höhe über dem Boden: Dieser Index stellt die Höhe des Punktes über dem Boden oder einer Referenzfläche dar. Er kann für Geländemodellierung verwendet werden oder um Objekte zu identifizieren, die über oder unter der Bodenoberfläche liegen.
- Relative Höhe: Dieser Index stellt die Höhe des Punktes relativ zu seinen benachbarten Punkten dar. Er kann verwendet werden, um Objekte zu identifizieren, die höher oder niedriger als ihre Umgebung sind.
- Dichte: Dieser Index stellt die Dichte von Punkten in der lokalen Nachbarschaft um den Punkt dar. Er kann verwendet werden, um Bereiche mit hoher oder niedriger Punktdichte zu identifizieren, wie z. B. Vegetation oder Gebäudefassaden.
-
Intensität: Sie stellt die Stärke oder Größe des Signals dar, das von einem Sensor oder Gerät empfangen wurde, als der Punkt erfasst wurde. In einigen Fällen steht die Intensität in Zusammenhang mit der Reflexion des Objekts an diesem Punkt. Zum Beispiel stellt in einer LiDAR-Punktwolke der Intensitätswert die Menge an Laserlicht dar, die von dem Objekt zum Sensor zurückreflektiert wurde. In diesem Fall würde ein höherer Intensitätswert auf eine Oberfläche hinweisen, die mehr Licht reflektiert, wie z. B. eine weiße Wand, während ein niedriger Intensitätswert auf eine Oberfläche hinweist, die weniger Licht reflektiert, wie z. B. ein schwarzes Auto. In anderen Fällen kann die Intensität eine andere physikalische Größe darstellen. Zum Beispiel kann in einer fotografischen Punktwolke die Intensität die Helligkeit eines Pixels im Originalbild darstellen, das zur Erzeugung der Punktwolke verwendet wurde.
- Bereich: Von niedriger Intensität bis hoher
- Gamma: Im Wesentlichen die Belichtung der Punktwolke, ein niedrigerer Gamma-Wert entspricht einer höheren Belichtung, ein höherer Gamma-Wert einer niedrigeren Belichtung, ergibt ein Sonnenuntergangslook
- Helligkeit: Die Helligkeit der Punktwolke, niedrigere Helligkeit macht sie dunkler, höhere Helligkeit macht sie heller.
- Kontrast: Ändert den Kontrast der Punktwolke, niedrigerer Kontrast lässt die Punktwolke grau erscheinen, höherer Kontrast überbelichtet die Standardfarben (rot, gelb, grün, blau...)
-
Intensitätsgradient: Er misst die Änderung der Intensität zwischen benachbarten Punkten in einer Punktwolke. Er stellt die Rate dar, mit der sich die Intensität in Bezug auf Entfernung oder Position ändert. Der Intensitätsgradient wird berechnet, indem die Werte der Intensität in der Punktwolke abgeleitet werden. Dies beinhaltet die Berechnung der partiellen Ableitungen der Intensitätswerte in Bezug auf die x-, y- und z-Koordinaten jedes Punktes. Der Betrag des Gradientenvektors an jedem Punkt stellt den Intensitätsgradientenwert dar. Hohe Intensitätsgradientenwerte deuten auf scharfe Kanten oder Grenzen hin, während niedrige Werte glatte oder allmähliche Übergänge anzeigen.
- Bereich: Von niedriger Intensität bis hoher
- Gamma: Im Wesentlichen die Belichtung der Punktwolke, ein niedrigerer Gamma-Wert entspricht einer höheren Belichtung, ein höherer Gamma-Wert einer niedrigeren Belichtung, ergibt ein Sonnenuntergangslook
- Helligkeit: Die Helligkeit der Punktwolke, niedrigere Helligkeit macht sie dunkler, höhere Helligkeit macht sie heller.
- Kontrast: Ändert den Kontrast der Punktwolke, niedrigerer Kontrast lässt die Punktwolke grau erscheinen, höherer Kontrast überbelichtet die Standardfarben (rot, gelb, grün, blau...)
-
Detailgrad: In der LiDAR-Punktwolkenverarbeitung kann der Detailgrad (LOD) die Punktdichte in der Punktwolke, die Auflösung der Daten oder das Abstraktionsniveau zur Darstellung der Daten bezeichnen. Beispielsweise würde eine Punktwolke mit einem hohen Detailgrad eine hohe Punktdichte, eine hohe Auflösung und ein feines Abstraktionsniveau aufweisen. Umgekehrt würde eine Punktwolke mit einem niedrigen Detailgrad eine geringere Punktdichte, eine niedrigere Auflösung und eine grobe Darstellungsstufe haben.
-
Matcap: In der LiDAR-Punktwolkenverarbeitung kann Matcap verwendet werden, um visuelle Texturen und Schattierungseffekte zu 3D-Modellen hinzuzufügen, die aus Punktwolken erstellt wurden. Durch die Anwendung einer Matcap-Textur auf ein 3D-Modell ist es möglich, eine realistischere und visuell ansprechendere Darstellung der Szene zu erstellen. Beispielsweise könnte eine Matcap-Textur verwendet werden, um das Aussehen einer Betonwand oder einer Baumrinde zu simulieren, wodurch dem 3D-Modell Tiefe und Realismus verliehen werden.
- Wählen Sie die anzuwendende Textur
-
Anzahl der Rückläufe: Es stellt die Gesamtanzahl der Laserpulse dar, die ausgesendet und zum LiDAR-Sensor zurückgesandt wurden, um diesen bestimmten Punkt zu erfassen. Ähnlich wie die Rückkehrnummer kann die Anzahl der Rückläufe von 1 bis 5 oder mehr reichen, abhängig vom verwendeten LiDAR-System. Die Gesamtanzahl der Rückläufe kann Informationen über die Komplexität und Struktur des Objekts oder der Szene liefern, die gescannt wird. Zum Beispiel kann ein Punkt mit einer hohen Anzahl von Rückläufen auf ein Objekt mit mehreren Schichten oder komplexer Geometrie hinweisen, wie z. B. ein Baumkronendach oder eine Gebäudefassade.
-
Punktsource-ID: Sie identifiziert den spezifischen Lasersensor, der den Punkt erzeugt hat. Jeder Lasersensor in einem LiDAR-System hat eine eindeutige ID oder Nummer, und diese Informationen werden in den Punktwolkendaten festgehalten, um Analysen und Qualitätskontrollen zu ermöglichen. Die Punktsource-ID ist besonders nützlich, wenn mehrere LiDAR-Sensoren verwendet werden, um eine einzelne Szene oder ein Gebiet zu erfassen. Durch die Identifizierung, welcher Sensor jeden Punkt erzeugt hat, ist es möglich, Qualitätskontrollen der Daten durchzuführen und sicherzustellen, dass die Daten zwischen verschiedenen Sensoren korrekt ausgerichtet und registriert sind. Dies ist besonders wichtig in Anwendungen wie der Forstwirtschaft, wo multiple LiDAR-Sensoren eingesetzt werden können, um Daten aus verschiedenen Winkeln und Perspektiven zu erfassen. Auf unserer Plattform wird die Punktsource-ID verwendet, um die Quell-Scan-ID zu speichern, was es Benutzern ermöglicht, leicht nachzuverfolgen, welcher Scan für jeden Punkt in der Punktwolke stammt. Beispielsweise könnten bei mehreren Scans desselben Bereichs mit einem 3D-Laserscanner jedem Scan eine eindeutige Scan-ID zugewiesen werden und das Punktsource-ID-Attribut für jeden Punkt in der Punktwolke könnte auf die entsprechende Scan-ID gesetzt werden.
-
RGBA: Es wird verwendet, um die Farbe jedes Punktes in der Punktwolke darzustellen. Die roten, grünen und blauen Kanäle werden verwendet, um die Farbe des Punktes darzustellen, während der Alpha-Kanal zur Darstellung der Transparenz oder Opazität des Punktes verwendet wird. Die Verwendung von Farben in LiDAR-Punktwolken kann für Visualisierungs- und Interpretationszwecke hilfreich sein, da sie zusätzliche Informationen über die Eigenschaften der von den Punkten dargestellten Objekte und Oberflächen liefern kann. Beispielsweise kann in der Vegetationskartierung die Farbe der Punkte verwendet werden, um zwischen verschiedenen Vegetationstypen zu unterscheiden oder Bereiche mit hoher oder niedriger Vegetationsdichte zu identifizieren.
- Gamma: Im Wesentlichen die Belichtung der Punktwolke, ein niedrigerer Gamma-Wert entspricht einer höheren Belichtung, ein höherer Gamma-Wert einer niedrigeren Belichtung, ergibt ein Sonnenuntergangslook
- Helligkeit: Die Helligkeit der Punktwolke, niedrigere Helligkeit macht sie dunkler, höhere Helligkeit macht sie heller.
- Kontrast: Ändert den Kontrast der Punktwolke, niedrigerer Kontrast lässt die Punktwolke grau erscheinen, höherer Kontrast überbelichtet die Standardfarben (rot, gelb, grün, blau...)
-
Rückkehrnummer: Sie repräsentiert die Anzahl der Male, die ein Laserpuls ausgesendet und zum LiDAR-Sensor zurückgesandt wurde, um einen bestimmten Punkt zu erfassen. Ähnlich wie die Anzahl der Rückläufe ist die Rückkehrnummer typischerweise ein Wert zwischen 1 und 5, wobei 1 den ersten Rücklauf und 5 den fünften Rücklauf angibt. Der erste Rücklauf repräsentiert den Laserpuls, der von der oberen Oberfläche des Objekts reflektiert wird, während nachfolgende Rückläufe möglicherweise Reflexionen von niedrigeren Oberflächen oder Mehrfachreflexionen innerhalb des Objekts darstellen können.
-
Scanwinkelrang: Er repräsentiert den Winkel zwischen dem Laserstrahl und der Referenzlinie des Scanners, als der Laserpuls ausgesendet wurde, um diesen bestimmten Punkt zu erfassen. Der Scanwinkelrang liefert Informationen über den Winkel, bei dem der Punkt erfasst wurde, wobei ein Wert von 0 die Referenzlinie des Scanners angibt und positive oder negative Werte die Abweichung von der Referenzlinie darstellen. In der Gebäudeextraktion kann der Scanwinkelrang verwendet werden, um Gebäudefassaden und Dachstrukturen basierend auf ihrer Ausrichtung relativ zur Referenzlinie des Scanners zu identifizieren. In der Straßenoberflächenanalyse kann der Scanwinkelrang verwendet werden, um Oberflächenfehler oder -unregelmäßigkeiten basierend auf dem Winkel des Scanners relativ zur Straßenoberfläche zu erkennen.
-
Benutzerdaten: Sie ermöglichen es Benutzern, zusätzliche Informationen zur Punktwolke hinzuzufügen, die über die Standardattribute wie XYZ-Koordinaten, Intensität und Rückkehrnummer hinausgehen. Benutzerdaten können verwendet werden, um eine breite Palette von Informationen zu speichern, wie z. B. RGB-Farbwerte, Klassifikationslabels oder Metadaten, die mit dem Punkt verbunden sind. Beispielsweise könnten Benutzerdaten verwendet werden, um anzugeben, ob ein Punkt Teil eines Gebäudes, eines Baums oder einer Straße ist, oder um Informationen über die Messqualität oder ihre Unsicherheit zu speichern. Die Verwendung von Benutzerdaten hängt von den spezifischen Bedürfnissen und Anwendungen des Benutzers ab. Sie können für eine Vielzahl von Aufgaben verwendet werden, wie Objekterkennung, Klassifikation, Segmentierung und Kartierung. Durch das Hinzufügen benutzerdefinierter Benutzerdaten zu einer Punktwolke ist es möglich, sinnvollere Informationen zu extrahieren und fortgeschrittenere Analyse- und Verarbeitungsvorgänge durchzuführen.
Wenn Ihre Punktwolke zunächst nicht richtig angezeigt wird, versuchen Sie es mit den RGBA- oder Intensitätsattributen, da diese am häufigsten verwendet werden.
Erfahren Sie mehr über die Eigenschaften der Punktwolke in diesem Artikel.
Wenn Sie auf Probleme stoßen, ist unser Support-Team hier, um Ihnen zu helfen. Viel Spaß beim Erkunden!